在图2-2和图2-3分别给出两种不同电流驱动模式的速度伺服系统框图。
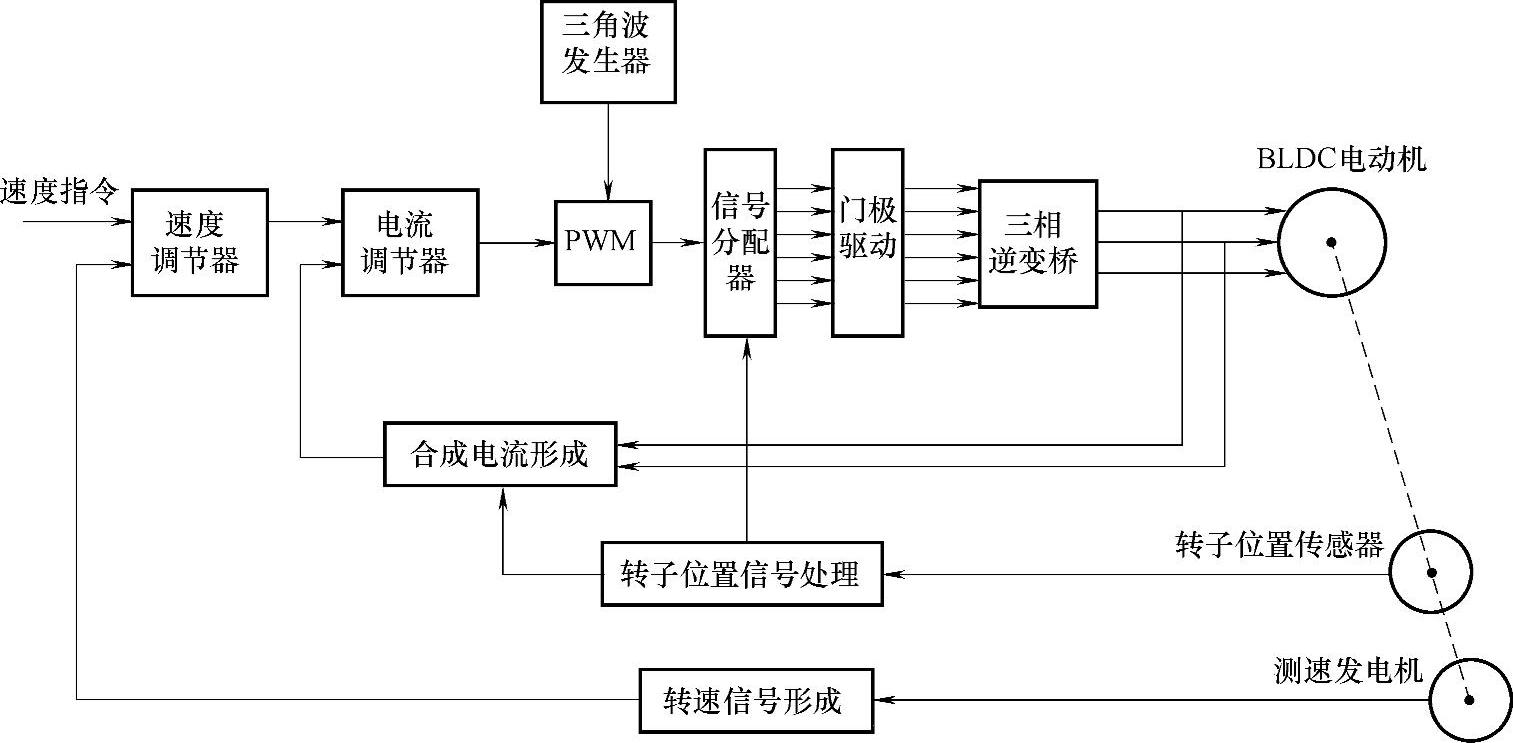
图2-2 方波驱动(BLDC方式)的速度伺服系统典型原理框图
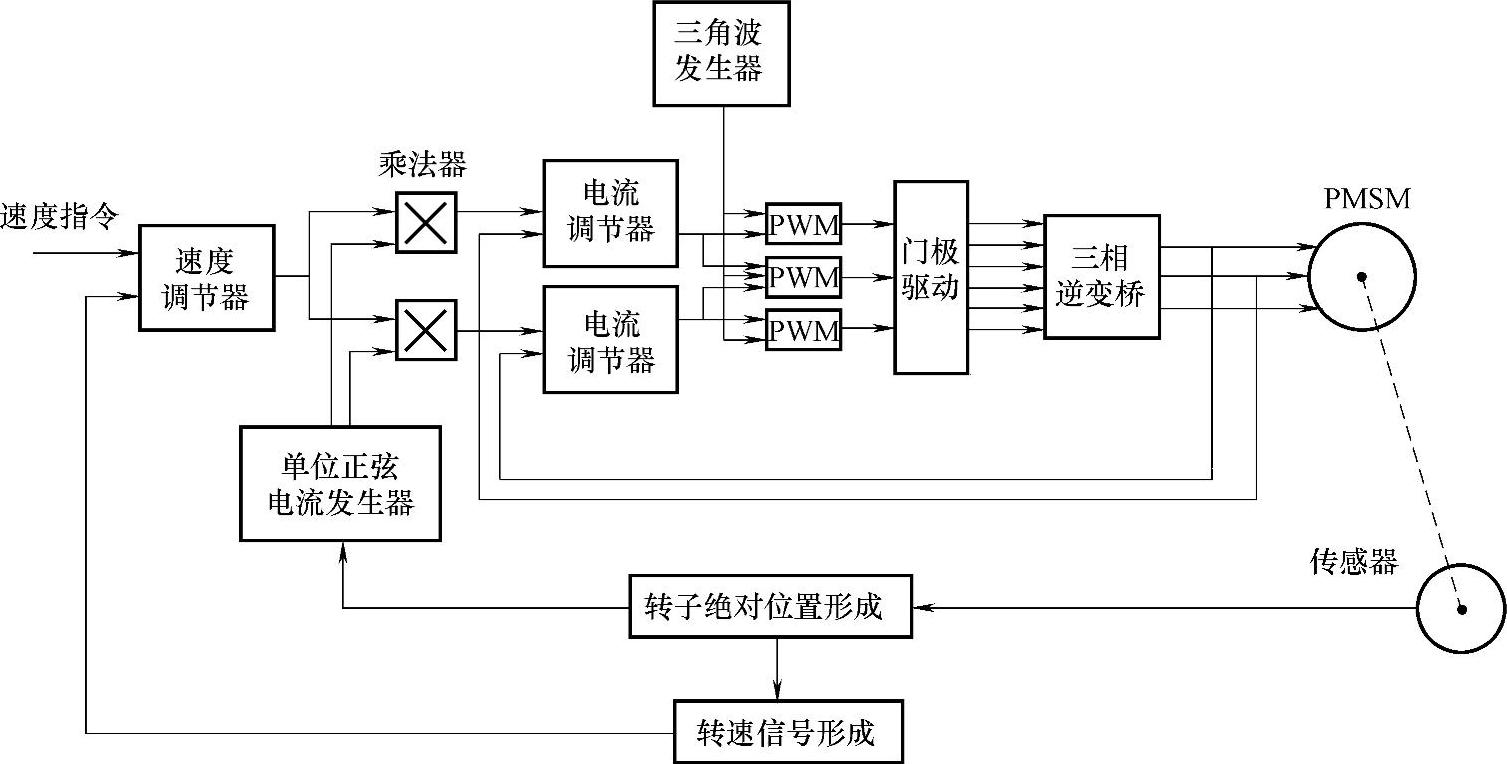
图2-3 正弦波驱动(BLAC方式)的速度伺服系统典型原理框图(https://www.daowen.com)
两种电动机运行均需要转子位置反馈信息,永磁同步电动机正常运行要求正弦波电流,无刷直流电动机要求的电流是矩形波,这导致它们在转子位置传感器选择上的很大差异。无刷直流电动机中的矩形电流导通模式只需要检测电流换相点。因此,只需要每60°电角度检测转子位置一次。此外,在任何时间只有两相通电,它只需要低分辨率转子位置传感器,例如霍尔传感器,它的结构简单,成本较低。
但是,在永磁同步电动机每相电流需要正弦波,所有三相都同时通电,连续转子位置检测是必需的。它需要采用高分辨率转子位置传感器,常见的是10bit以上的绝对型光电编码器,或如图2-3所示的解算器(旋转变压器)与R/D转换器(旋转变压器/数字转换器)的组合,成本比三个霍尔集成电路要高得多。
如果在位置伺服系统中,角位置编码器既可用作位置反馈,同时也可以用于换相的目的,这样无刷直流电动机转子位置传感器的简单并没有带来什么好处。然而,对于速度伺服系统,永磁同步电动机还需要高分辨率的转子位置传感器,而在无刷直流电动机中,有低分辨率传感器就足够了。如果换相引起的转矩波动是可以接受的话,在速度伺服系统采用无刷直流电动机显得更为合适。
对于三相电动机,为了控制绕组电流,需要得到三相电流信息。通常采用两个电流传感器就足够了,因为三相电流之和必须等于零。因此,第三相电流总是可以由其他两相电流推导出。在一些简易型无刷直流电动机驱动器中,为节约成本,只采用一个电流传感器,检测的是直流母线的电流,通过计算可以得到三相绕组的电流值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






