3次谐波检测法适用于 连接、三相六状态工作的无刷电机。其基本思想是相绕组反电动势波除了基波分量外,主要还包括3次谐波。在一个基波周期内三次谐波共有6个过零点。如果取得反电动势3次谐波信号,再将它移相90°(相当于基波的30°),就可以获得预期的换相点,并且无论在任何转速及负载情况下,这个相位差保持不变。3次谐波反电动势6个过零点实际上和基波反电动势过零点重合,所以取得3次谐波反电动势过零点后,可以仿照上节有关方法实现电机的换相。
连接、三相六状态工作的无刷电机。其基本思想是相绕组反电动势波除了基波分量外,主要还包括3次谐波。在一个基波周期内三次谐波共有6个过零点。如果取得反电动势3次谐波信号,再将它移相90°(相当于基波的30°),就可以获得预期的换相点,并且无论在任何转速及负载情况下,这个相位差保持不变。3次谐波反电动势6个过零点实际上和基波反电动势过零点重合,所以取得3次谐波反电动势过零点后,可以仿照上节有关方法实现电机的换相。
现有文献中3次谐波反电动势的提取方法有两种:
(1)3次谐波电动势可以从 连接的电阻网络的中心点n到电机绕组中心点s之间的电压提取,即电压usn。无论续流二极管的导通角有多大,或者是否存在PWM,usn都能很好地反映出3次谐波电动势。这个方法的缺点是:
连接的电阻网络的中心点n到电机绕组中心点s之间的电压提取,即电压usn。无论续流二极管的导通角有多大,或者是否存在PWM,usn都能很好地反映出3次谐波电动势。这个方法的缺点是:
1)它仅适用于绕组电感不随转子位置变化、三相参数对称、电枢反应微弱、磁场的三次谐波分量和3次谐波绕组系数都比较大的电机。在实际应用中,这些前提或多或少得不到满足,影响检测的准确程度。所提取的3次谐波电动势信号往往也带有一些干扰。但是这些干扰可以用简单的低通滤波器来削弱。
2)绕组中心点必须从电机引出,这在一定程度上限制了3次谐波方法的应用。
图13-2给出一台无刷电机相反电动势、线反电动势和3次谐波反电动势(CH4)实测示波图。图中它们的幅度比例尺不同。这里3次谐波反电动势是从电阻网络的中心点到电机绕组中心点之间的电压提取的。由图可以看出,3次谐波反电动势过零点与预期的换相点之间的相位关系。
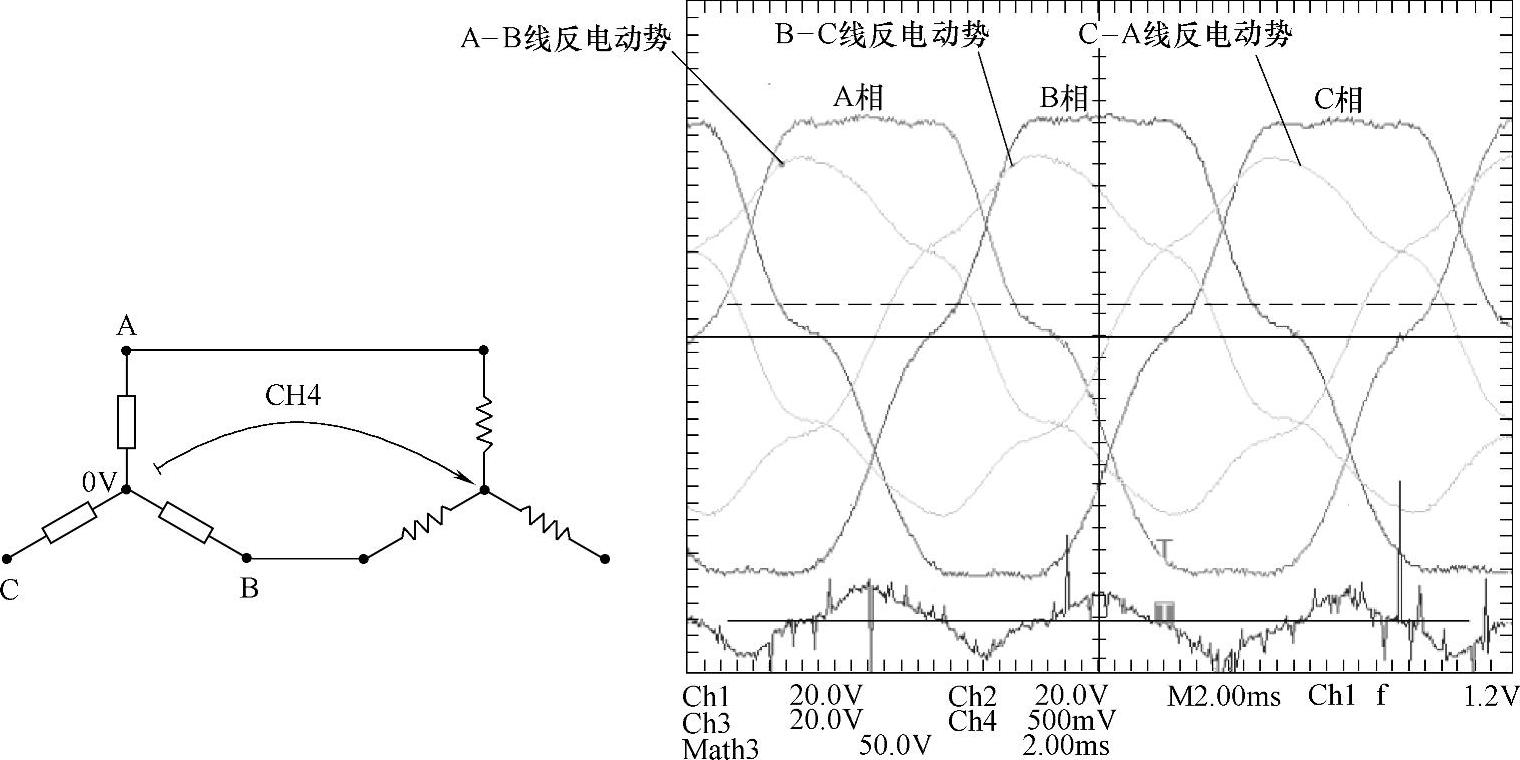
图13-2 一台无刷电机相反电动势、线反电动势和3次谐波反电动势实测示波图
(2)为了避免使用绕组中心点,Moreira在参考文献[4]提出在星型接法绕组并联一个星型电阻网络,通过电阻网络中性点n与直流电源的中心点h之间的电压uhn来提取三次谐波电动势,省去了电机绕组中心点的引出线。这种位置检测方法与利用反电动势过零点检测方法进行了对比试验,采用后者获得的调速范围为300~8000r/min;而反电动势3次谐波积分法获得了更宽的调速范围,为100~8000r/min。它也需要采用开环起动方式,但性能要比反电动势过零点检测法优越。与反电动势过零点检测法相比,3次谐波积分法同电机速度、负载情况无关,受逆变器引起的干扰影响小,对滤波器要求低,移相误差小,有更宽的调速范围;低速时依然可以检测到3次谐波信号,所以起动和低速性能要好一些,在更宽的调速范围内能获得更大的单位电流出力和更高的电机效率。
但是参考文献[5]证明了uhn并非3次谐波电动势,包含的实际上是相电动势的基波分量,但幅值只有端电压法的一半,而且该波形过零点后90°的附近正好被续流二极管导通的电压脉冲所覆盖。因此认为,用uhn的方法并无可取之处。关于这个问题,参考文献[6]给出了详细分析,指出了相关文献误区,简介如下:
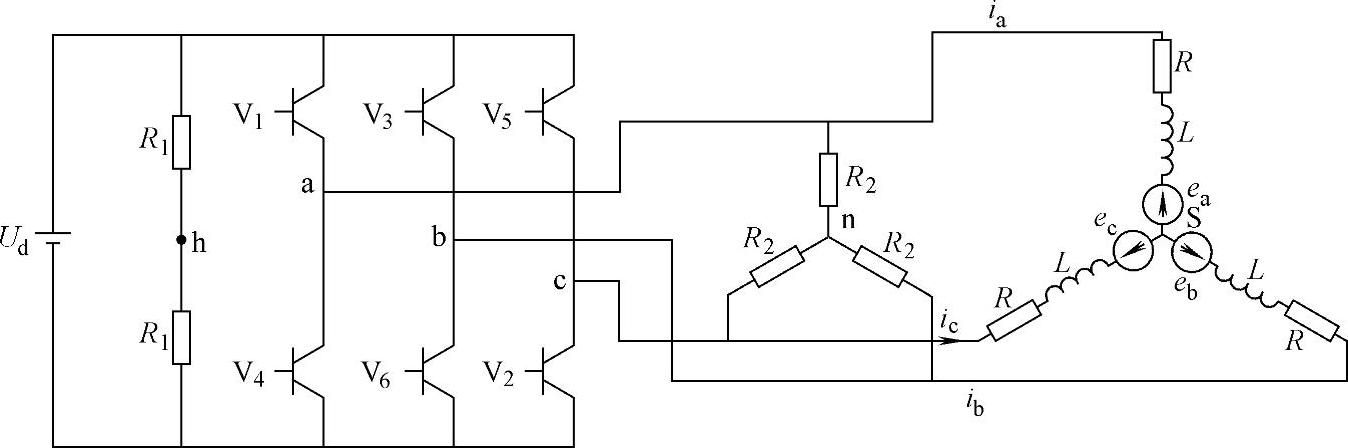
如图13-3所示的电路结构若电机处在三相六状态下对称运行,当开关V1和V2导通时电路简化成图13-4。由相电压方程可以推导得到:
设想电动势中只有基波和3次谐波,上式的对称三相基波反电动势之和为零,对称三相的3次谐波反电动势是同相位,故得到
usn=E3sin3ωt
上式说明usn正是3次谐波反电动势信号。
 (https://www.daowen.com)
(https://www.daowen.com)
图13-3 提取三次谐波反电动势的电路
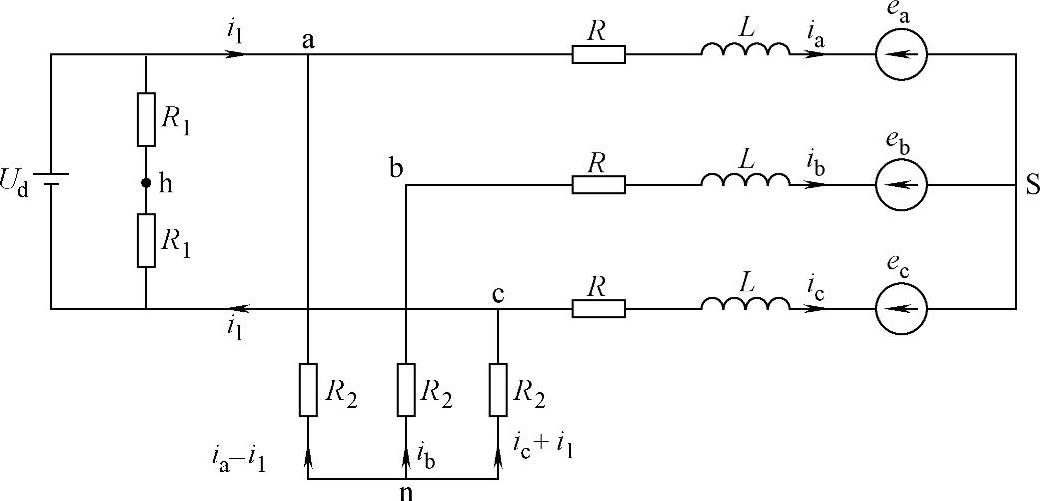
图13-4 V1和V2导通时的简化电路
再分析uhn,为分析方便,略去绕组电感,推导得到uhn的表达式如下式所示,显然uhn与3次谐波反电动势无关,而与基波反电动势有关:
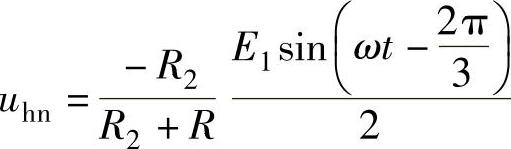
式中,E1和E3分别为相绕组反电动势的基波和3次谐波幅值。
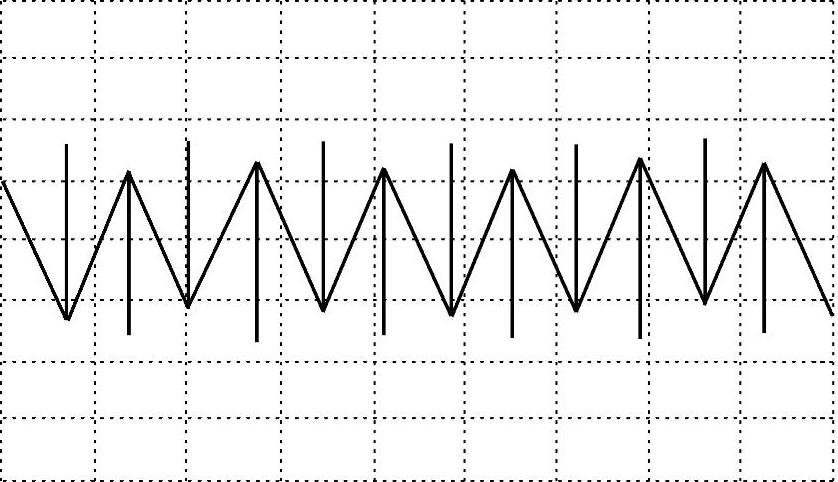
图13-5 uhn的实测波形
用一台相绕组反电动势3次谐波很小的无刷电机进行验证。实测的三相六状态下的uhn波形如图13-5所示,它看似3次谐波,其实与3次谐波电动势无关。该电机在某试验转速下,测得基波电动势幅值为E1=52V;3次谐波电动势幅值为E3=0。当电机在三相六状态下对称运行时,其uhn波形幅值点的电压值uhnm=12~13V。
若按上式计算,

从而验证了上面的分析。无刷电机只要是三相六状态运行,就存在类似的波形,与是否存在3次谐波反电动势无关。分析表明,它其实是由截取反电动势的局部拼接而成的。因此参考文献[6]建议采用这样的uhn波形信号作为检测转子位置方法时不宜称为“3次谐波检测法”,应正名为“基波电动势换相法”或“电动势换相法”。
利用检测到的uhn电压,经低通滤波滤除高频成分,在uhn过零点将其移相30°作为换相信号,电机就可以运行。其缺点是:在电机转速低于一定值时,检测到的uhn信号严重变形,引起后续电路无法正常识别,导致不能估计转子位置。因此本方法在低速时仍无法正确估计转子位置,需要额外的起动程序。另外,电机在大动态运行时也有可能出现位置检测失败,造成电机失步。
参考文献[10]提出了一种用3次谐波检测转子位置的新方法,文中将反映三次谐波相位信息的方波输入DSP的I/O口,利用DSP强大的数据处理功能,用软件实现数字锁相功能和对换相时刻的准确估计,去除了传统的硬件积分方法,实验表明该方法能够准确快速地估计转子位置,动静态特性很好,但是当电机的转速低于某个值时,检测到的三次谐波严重畸变,不能准确估计转子的位置,所以在低速时仍需要额外的启动程序。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




