【摘要】:图8-18 动态深度聚焦使用示例3.扇形扫描使用超声相控阵探头中固定晶片组激发超声束,在预设的初始角度和结束角度范围内,按照固定的角度步进量进行扫描,从而实现特定扇形区域的覆盖。
由计算机控制的声束扫描模式主要有以下三种。
1.线形扫描
高频电脉冲多路传输,按相同聚焦定律和延时定律横扫一组晶片,如图8-17所示,声束则以恒定角度,沿阵列探头主轴方向进行扫描,配合超声相控阵探头一维横向移动,相当于用常规超声换能器做栅格扫描。也可配合斜楔使用,以实现更大的声束角度偏转范围。相控阵系统采用电子扫查时,在不移动探头的情况下即可形成沿线阵主轴方向的横截面图像,所形成的横截面图像中的每一个横坐标对应一个聚焦法则下的A扫描信号。通过相邻A扫描信号的连续显示使探头覆盖下横截面中的不连续信号更为直观,这种扫查成像方式又称为线性B扫描。
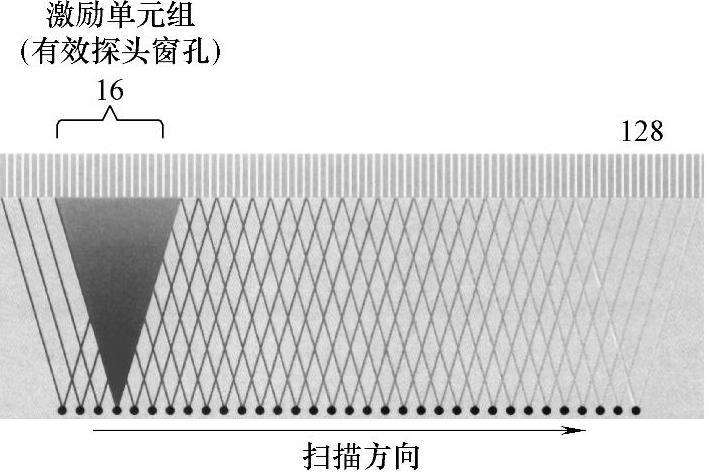
图8-17 电子扫描产生直射声束
2.动态深度聚焦(简称DDF)
通过数据后处理方式实现在声束轴线方向不同深度的聚焦成像。采用动态深度聚焦时,超声相控阵系统按照特定聚焦法则对探头进行一次激发,然后按照一定的延时规则对每个独立晶片所接收的信号重新进行软件延时和叠加成像,实现检测对象中不同深度的聚焦检测效果,通过数据后处理方式实现在声束轴线方向不同深度的聚焦成像。动态深度聚焦使用示例如图8-18所示。(https://www.daowen.com)
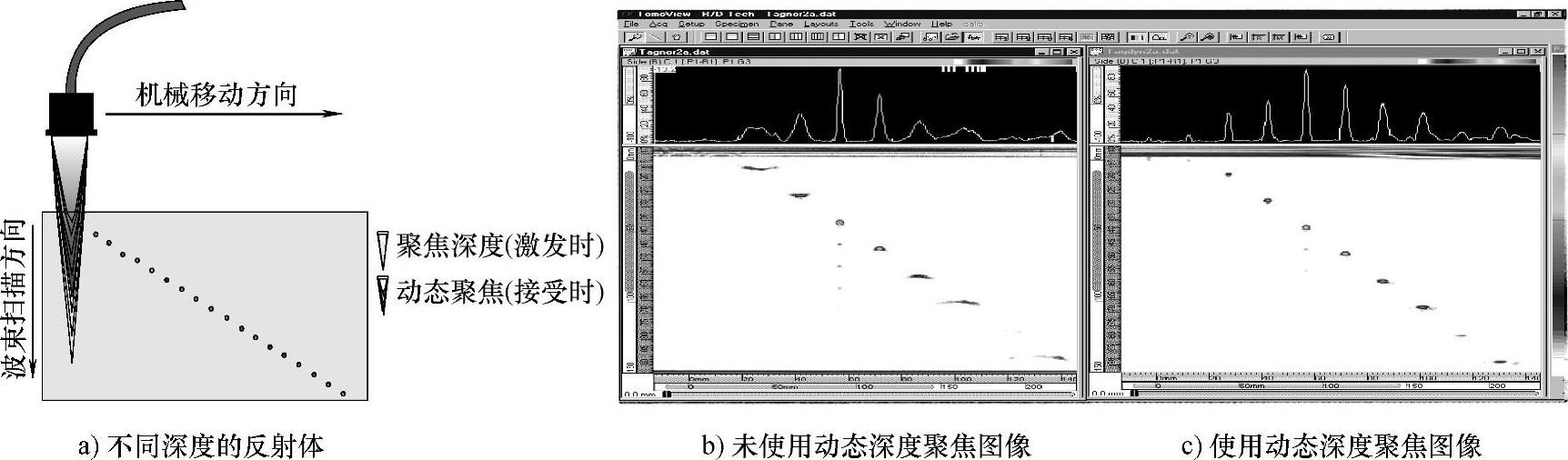
图8-18 动态深度聚焦使用示例
3.扇形扫描(变角度扫描)
使用超声相控阵探头中固定晶片组激发超声束,在预设的初始角度和结束角度范围内,按照固定的角度步进量进行扫描,从而实现特定扇形区域的覆盖。在扇形扫描中,每一个角度对应一个聚焦法则下的A扫描信号,如图8-19所示。
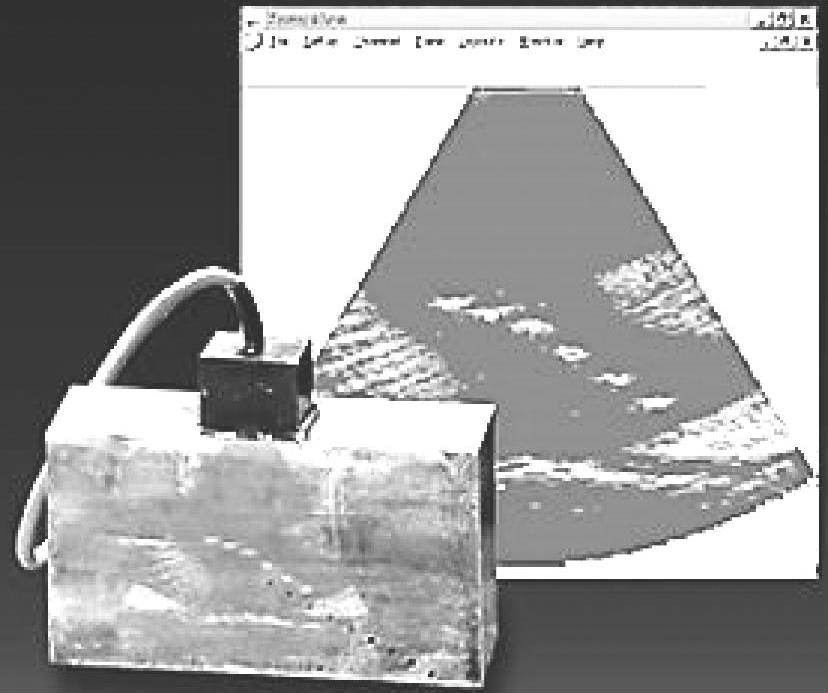
图8-19 扇形扫描示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






