霍夫(Hough)变换于1468年由Paul Hough提出,是一种依据图像全局统计特性的目标检测方法,Hough变换利用两个不同坐标系之间的变换来检测图像中的直线和曲线。它将图像空间中的直线映射到参数空间的一个点,然后对该点进行累计投票,这样便可得到参数空间中的峰值。经过Hough变换后,直线的检测问题便转换成了参数空间峰值的统计问题,提取出的峰值经过反变换拟合出所需的直线方程。
一般的直线用斜率k和截距b来表示,即以方程y=kx+b表示。如果检测直线的N个边缘表示为
(x0,y0)、(x1,y1)、…(xn-1,yn-1)
假设直线的方程表达式为y=kx+b,于是可以得到n个方程式:
y0=kx0+b、y1=kx1+b、…yn-1=kxn-1+b
用计数器num[k][b]记录每一可能直线的值,num中的最大值对应的直线y=kx+b即为待求直线的最佳解。
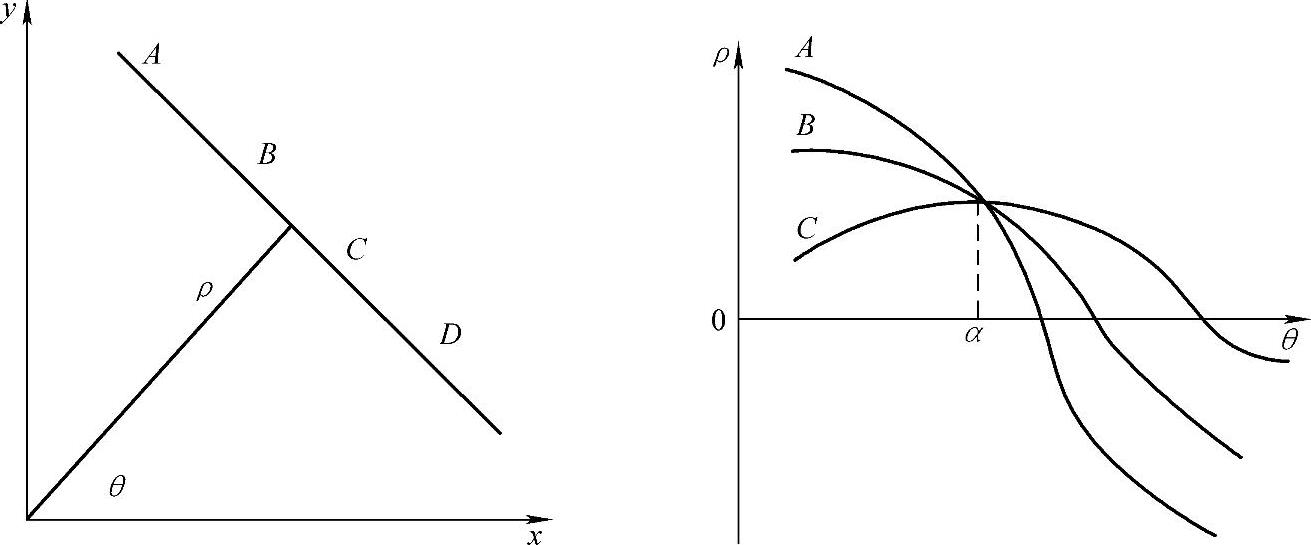
鉴于上述方法很难确定斜率k的取值范围,如果斜率k取值太细,则计算量大;反过来k取值太粗的话,又会造成所求直线的准确率不够。图像空间中的任一直线均可用极坐标表示:
ρ=xcosθ+ysinθ (2-11)
式中,ρ为直线1相对于坐标原点的距离;θ为直线1与x轴的夹角。
如图2-9所示,直角坐标空间上的一点转换到极坐标空间上,则是一条正弦曲线。直角坐标空间上的同一条直线上的各点在极坐标空间对应的曲线均相交于一点。
 (https://www.daowen.com)
(https://www.daowen.com)
图2-9 Hough变换图
动态感兴趣区域
车道线信息一般在图像的下半部分,或者摄像头视角区域的下半部分。感兴趣区域(ROI)的建立是在空间直角坐标系下确定车道线可能存在的区域范围,这样会缩短车道线检测的时间,提高了检测速率和实时性。
对图像建立直角坐标系,坐标原点在图像中心,则距离坐标原点X宽度的左右两侧分别有一个宽度为W的矩形区域,这两个矩形区域就是我们建立的ROI,如图2-10所示。
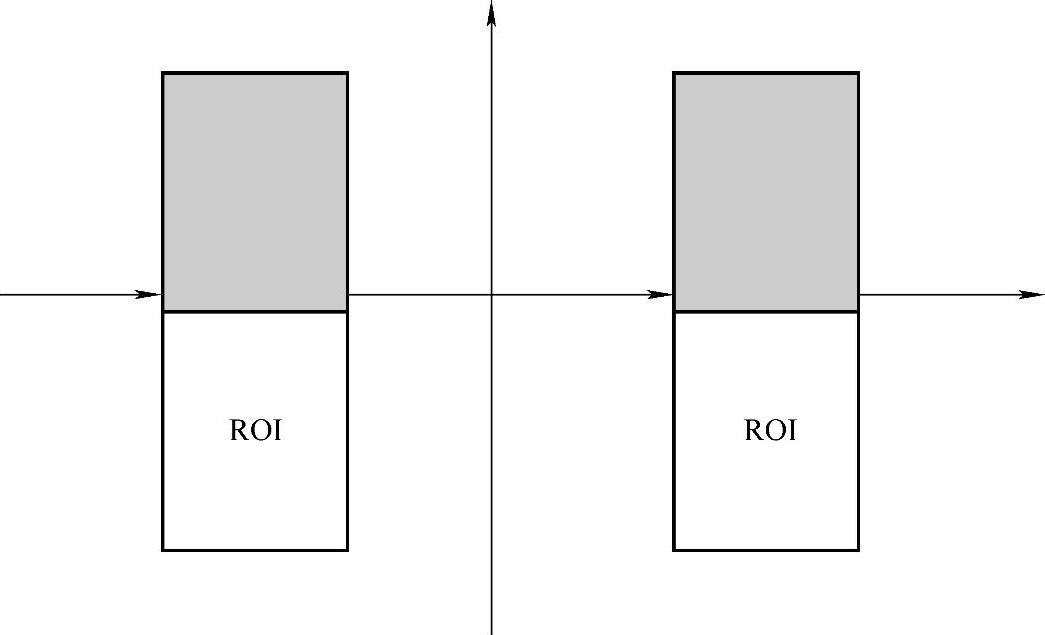
图2-10 图像中ROI区域
预处理后的图像只剩车道线的边缘,根据车道线建立ROI后,Hough变换会大大降低计算复杂度。经过Hough变换后,便可得到当前预估的车道线情况。然后将预估的车道线斜率与混合高斯模型中的车道线斜率对比,如果两者相差在一定阈值范围内,则将预估的车道线确定为检测的车道线,并用预估车道线斜率来更新高斯混合模型的参数;否则,舍弃当前的预估的车道线,而采用高斯混合模型中的车道线。车道线检测效果如图2-11所示。

图2-11 车道线检测效果图
通过以上实验结果分析可知,基于Hough变换的车道线检测具有较好的性能,其检索结果符合智能车对车道线的要求。但算法还存在进一步研究的问题,Hough提取的速度在一定程度上影响了该算法的实用性,同时在拐弯以及光线不足等环境下,检测效果有待改善,可结合车道线的检测算法对车道线进行跟踪检测,从而解决车道线漏检等问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






