在各种类型的多电平逆变器中,三电平中点钳位型(Neutral Point Clamped,NPC)逆变器以其结构简单、需要器件数量少、容易实现能量双向流动而在高压大容量场合备受人们青睐,尤其是对动静态性能要求比较高的场合[1-3],如机车牵引、电动汽车、船舶推进等。
PWM技术是三电平NPC逆变器应用过程中的一项关键技术。PWM控制技术花样繁多,且不断推陈出新,相应的分类方法也很多。例如,按照产生波形的方法可以分为计算法、载波调制法和跟踪控制法。计算法有的需要满足严格的伏秒平衡关系[4],其典型代表有面积相等SPWM、空间矢量PWM,还有一种就是优化PWM,典型代表如SHEPWM,主要是为了消除特定次数的谐波;载波调制法需要载波和调制波,载波可以是三角波或锯齿波,调制波通常是正弦波,根据控制目标的不同也可以是梯形波或注入零序分量的正弦波等;跟踪控制法不需要用调制波对载波进行调制,它通过比较给定参考波形和反馈信号来控制器件的通断,典型代表是滞环比较PWM。另外一种分类方式是按照控制目标,可以分成电压正弦PWM、电流正弦PWM、磁链正弦PWM以及其他优化目标的PWM。电压正弦PWM主要包括SPWM和注入零序分量的SPWM。电流正弦PWM主要包括滞环控制PWM和无差拍PWM;磁链正弦PWM主要是指空间矢量PWM。此外,还有其他优化目标的PWM,如特定消谐PWM、随机PWM等。就实现方式而言,PWM可以采用模拟电路或者数字电路实现,市场也有很多商用的PWM集成电路。随着微电子技术的发展,在数字化的今天,更为通用和灵活的方法是采用DSP或单片机来实现。目前已经出现了多种电机控制专用DSP,它们大都集成了PWM发生器,可以用软件的方式来实现载波,从而大大方便了PWM的实现。采用数字电路实现时,本质上采用的是规则采样法,它的效果和自然采样法差不多,但计算量比自然采样法要小很多。此外,现场可编程门阵列(Field Programmable Gate Array,FPGA)目前在PWM中也得到了广泛的应用[5-7],其执行速度快,可重复编程。DSP和PGA已经成为PWM实际应用中的重要手段。
目前在大容量三电平逆变器中得到应用的PWM方法主要有载波PWM[8-11]、空间矢量PWM[12-13]和特定消谐PWM[14-16]。无论哪种PWM技术,在实际应用于大容量三电平逆变器时,都必须解决如下几个问题:中点平衡、最小脉宽和死区补偿。
中点平衡是三电平拓扑本身所导致的一个问题,解决方法很多,可以采用硬件的方法,如在大容量变频器中通常采用12脉波整流,整流器中点和逆变器中点直接相连,相当于将逆变侧的中点平衡问题转嫁到整流侧,这样有可能导致整流侧的功率不平衡;也可以采用软件的方法,一般认为采用软件解决更加灵活。在三电平中,小矢量存在两个互反的状态,它们对中点的影响是相反的。因此,中点控制主要是通过分配两个小矢量的比例,不同的矢量方法导致了五花八门的中点平衡策略,但本质上是一样的。通常可以把中点平衡策略分为三种[17]:①通过矢量的组合来使中点自动平衡[18]。这种方法基于一个开关周期内电流基本不变,通过同时采用两个相反的小矢量来达到中点平衡,尤其开关频率较高时。其缺点是鲁棒性较差,相当于完全的开环控制,在开关频率有限的前提下,实际中难以控制中点长期稳定平衡。②滞环控制策略[19]。需要检测中点电压和电流,通过判断当前矢量对中点平衡有利与否,决定其时间分配比例。这种方法虽然不能完全控制中点恒定,但可以把中点控制在一定波动范围内,且鲁棒性好,是一种较为实用的方法。③主动控制策略[20]。通过检测中点电压和负载电流的大小,来计算出小矢量的精确作用时间。理论上这种方法最好,可以完全地控制中点电压,但它受检测精度的影响,对系统的软硬件资源要求较高,而且计算出来的矢量时间常常无法满足,鲁棒性不如第二种策略。
最小脉宽是电力电子器件本身受开关速度限制所导致的一个问题。在高压大容量领域中通常采用GTO和IGCT等电流型器件,其最小开通和关断时间通常都比较长,一般在几十微秒。PWM调制在一些边缘区域很容易出现窄脉冲,简单地剃除窄脉冲会增加谐波含量,减小起动转矩,而简单地放大窄脉冲也会增大谐波含量,增大起动电流。通常需要在满足矢量合成的原则下,通过改变输出矢量组合或顺序来避免最小脉宽。国内外不少文献对此进行了研究[8,21-24],参考文献[21,22]分析了受最小脉宽影响的区域,其中主要在两个区域受最小脉宽区域的影响比较严重,一个是调制比很小时,另一个是调制比接近1时。前者通常是通过改变矢量序列来解决,由于零矢量在调制比较小时作用时间比较长,因此可以采用在首尾和中间插入零矢量的方法,缺点是增加了开关损耗。后者可以通过提高直流母线电压来解决,这会牺牲一点电压利用率,但在高压大容量场合通常留有一定裕量,因此问题不大。(https://www.daowen.com)
死区也是电力电子器件本身所引起的一个不可避免的问题。由于实际电力电子器件并非理想开关器件,为了避免直通时器件承受全压而损坏,必须在同一桥臂的上下管之间插入一定的死区时间。在死区过程中,输出矢量的状态取决于当时的电流流向。一般地,当电流流出桥臂时,实际输出电压比理想输出电压少输出一个死区时间的电压,电流流进桥臂时正好相反,它们的关系可以表示如图3-7所示。所以相应的死区补偿方法[25]就是根据每相电流的方向,在输出电压中增加或减少相应的死区电压,具体在DSP中是通过改变比较寄存器的值来实现。也有一些死区补偿方法不检测电流[26],而通过电压来判断电流的方向,但算法比较复杂,有时还需要负载功率角的信息。在大功率变频器中,为了防止器件直通,死区通常设得比较大,因此对死区进行补偿十分必要。图3-8所示是5Hz时死区补偿前后的电流波形对比。可见,补偿后电流波形质量明显提高,由死区引起的低次谐波含量明显减少。
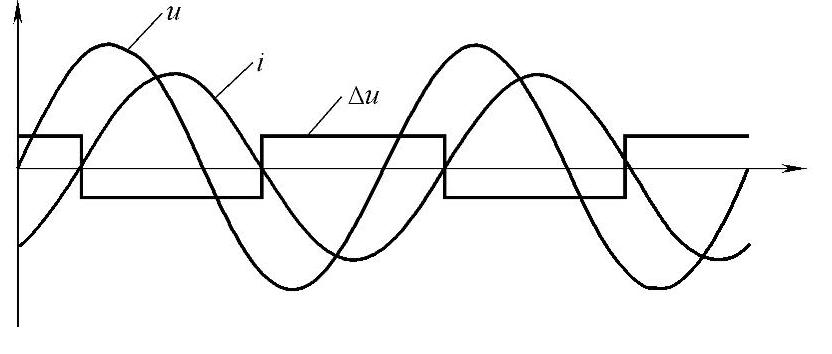
图3-7 逆变器输出电压、电流和死区误差电压
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




