蛙式打夯机是一种电动自移式打夯机。如图2-127所示为HW-20型蛙式打夯机的构造示意图。
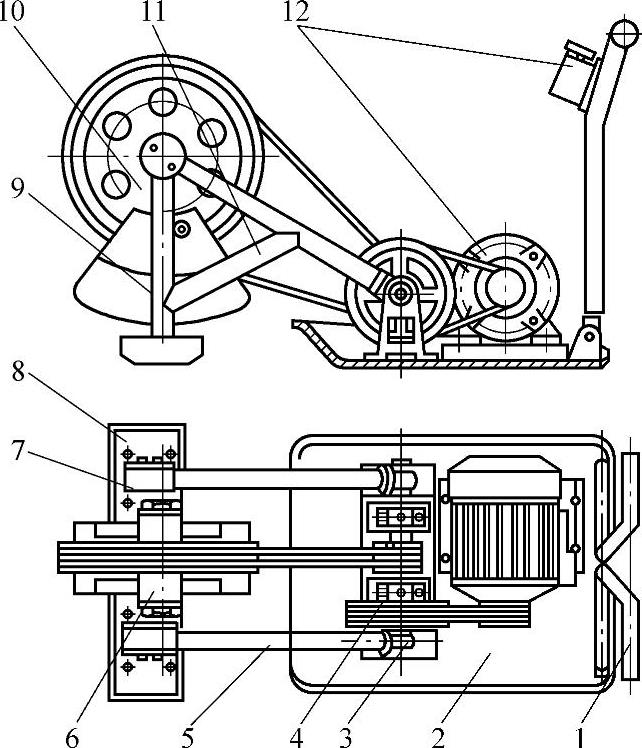
图2-127 HW-20型蛙式打夯机的构造示意图
1—操纵手柄 2—拖盘 3—轴销铰接头 4—传动装置 5—动臂 6—前轴装置 7—前轴轴销 8—夯板 9—立柱 10—大带轮 11—斜撑 12—电动机及电源开关
HW-20型蛙式打夯机主要由操纵手柄、拖盘、轴销铰接头、传动装置、动臂、前轴装置、前轴轴销、夯板、立柱、大带轮、斜撑、电动机及电源开关等组成。
如图2-128所示为国产H8-60型蛙式打夯机构造示意图。它与HW-20型蛙式打夯机的结构大同小异,主要由夯锤、夯架、V带、中间传动带、撬座、电动机、固定螺栓、扶手等组成。
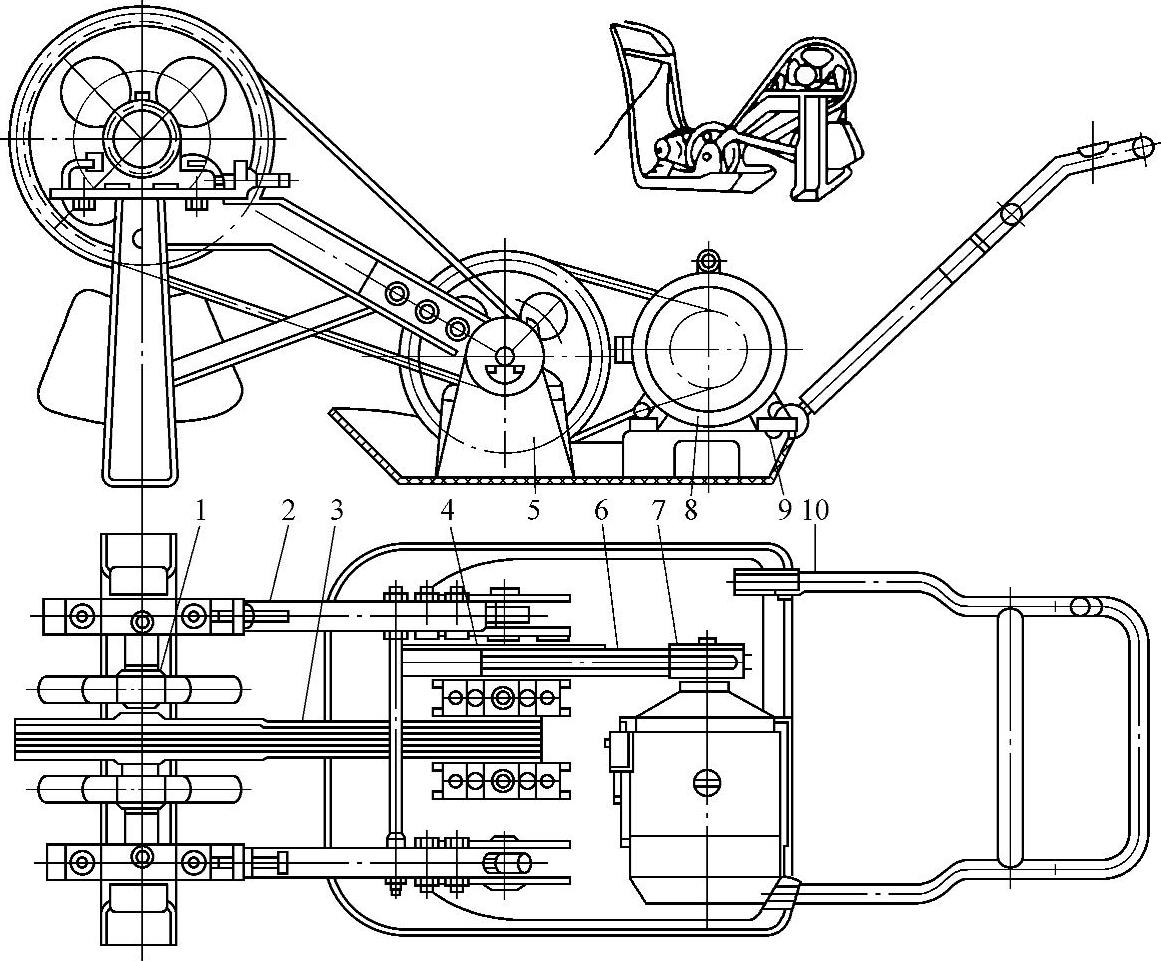
图2-128 国产H8-60型蛙式打夯机构造示意图
1—夯锤 2—夯架 3、6、7—V带 4—中间传动带 5—撬座 8—电动机 9—固定螺栓 10—扶手
在蛙式打夯机中,前轴总成是一个关键部件,它直接影响蛙式打夯机的夯实性能。前轴总成包括固定的前轴(心轴)、大带轮、偏心块、滑动轴套、固定套和偏心套等。
前轴(心轴)的两端装有两个偏心套,连同左右动臂和夯板立柱组成一个框架。偏心套可利用其偏心距来调整V带的松紧程度。左右两侧偏心套的螺纹旋向相反,故大带轮单向旋转时可将左右偏心套同时紧固。大带轮轮毂两侧用键联接扇形偏心块,为防止带轮和偏心块的轴向窜动,左右两侧由固定套进行定位。(https://www.daowen.com)
蛙式打夯机的工作原理如图2-129所示。
若将偏心块旋转一周分为Ⅰ、Ⅱ、Ⅲ、Ⅳ四个位置,则当偏心块由I转至Ⅱ位置时,偏心块产生的离心力pn的方向将朝蛙式打夯机的后方(即图2-129示右方),此时离心力将给打夯机一个向后的推力,但由于夯板尚未抬起,因而打夯机整机的使用质量与地面所产生的摩擦力大于离心力pn,所以打夯机托盘底板与地面自锁,并未向后移动。
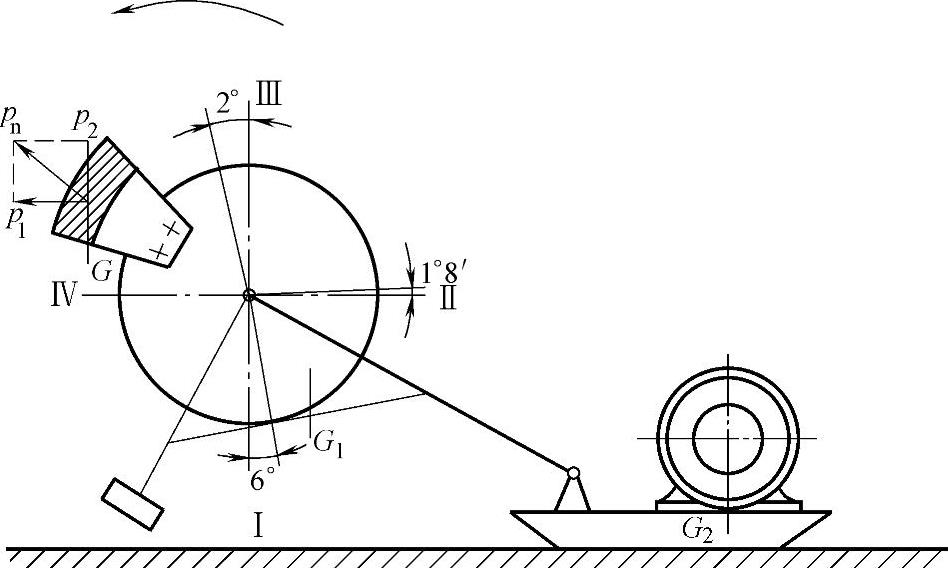
图2-129 蛙式打夯机的工作原理图
G—偏心块重力 G1—带轮重力 G2—拖盘总重力
当偏心块自Ⅱ位置转向Ⅲ位置时,离心力pn则向上。此时,离心力pn应大于偏心块和带轮的重力,故迫使动臂框架围绕托盘前的轴销向上摆动而升举,为冲击夯实储备能量。
当偏心块由Ⅲ位置转至Ⅳ位置时,离心力pn水平朝前。与此同时,动臂框架也在向前摆动产生向前的惯性力pm。当pn+pm>机重与地面的摩擦力时,打夯机则向前自行移动。
而当偏心块自Ⅳ位置转回至Ⅰ位置时,偏心块所产生的离心力pn朝下,夯板落地冲击被压层,其夯实冲击力为离心力pn、偏心块重力G和带轮重力G1的总和。
由于动臂框架的运动存在滞后现象,实际上,偏心块在转至Ⅱ位置之后约1°8′位置处,动臂框架才开始抬起;偏心块转至Ⅲ位置之后约2°时,动臂框架才摆动至最高点;当偏心块转回至I位置之后6°时,夯板才开始夯击地面。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



