电气系统电源由底盘蓄电池提供+(DC24V),负极搭铁;控制系统由电源、工作灯控制回路、臂架遥控系统控制回路、各种底盘测速、调速及接口控制回路、PLC控制回路、电磁阀驱动回路及GPRS/GPS远程监控系统等构成。电控系统示意图如图4-60和图4-61所示。
泵车电气原理如图4-62所示,电控实物如图4-63所示。现将各回路工作原理分别介绍如下:
(一)电源及工作灯控制回路
如图4-64所示,料斗工作灯、手提工作灯电源均由蓄电池经熔丝FU1直接供给,料斗工作灯由自带的开关控制,手提工作灯可根据需要直接插在电控柜旁或多路阀组上的专用插座中则可使用。
电控系统电源由驾驶室内电源开关S1控制,按下电源开关S1,电源指示灯L1(该灯在开关S1内)亮,电控系统得电,继电器KA1得电,其触点闭合后经熔丝FU2、FU3、FU4向遥控器、电磁阀及PLC等相关电路提供电源,支腿工作灯、侧边灯均由电控柜内断路器QF2控制。
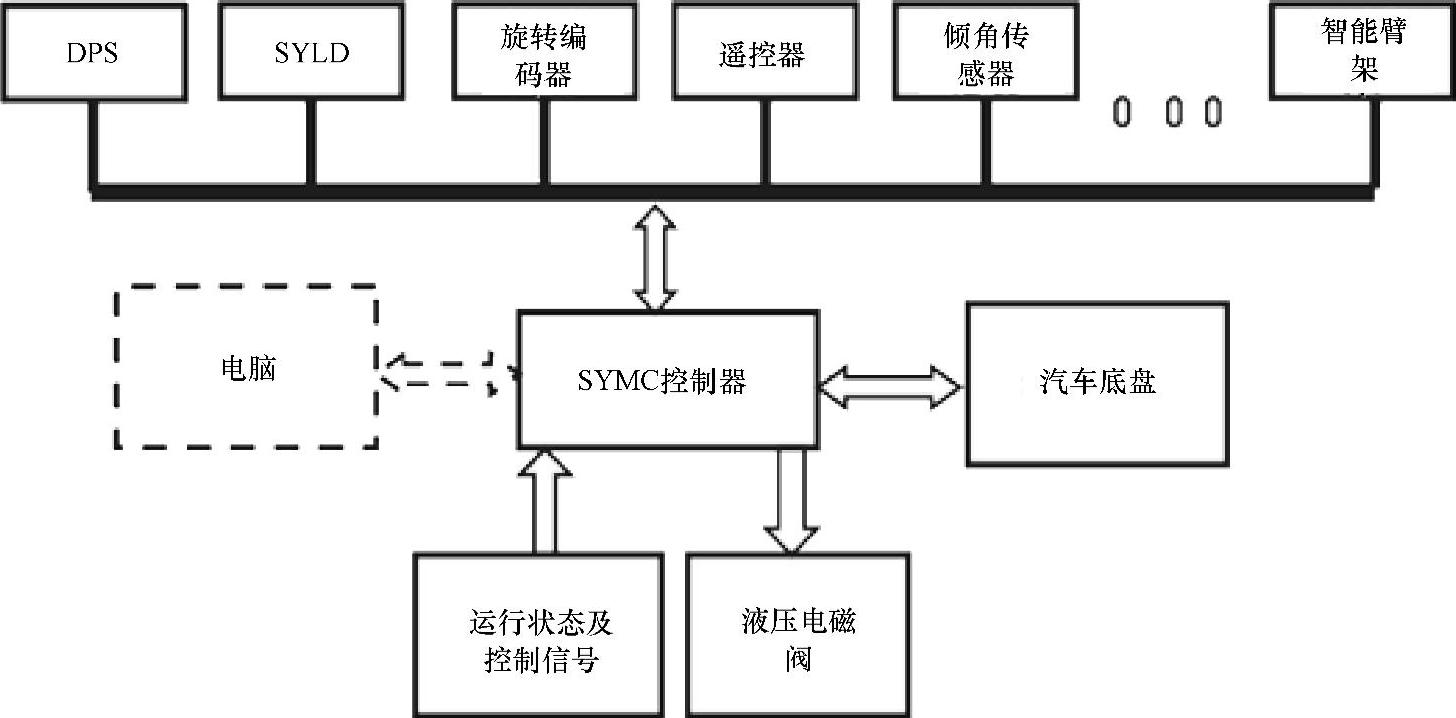
图4-60 电控系统示意图
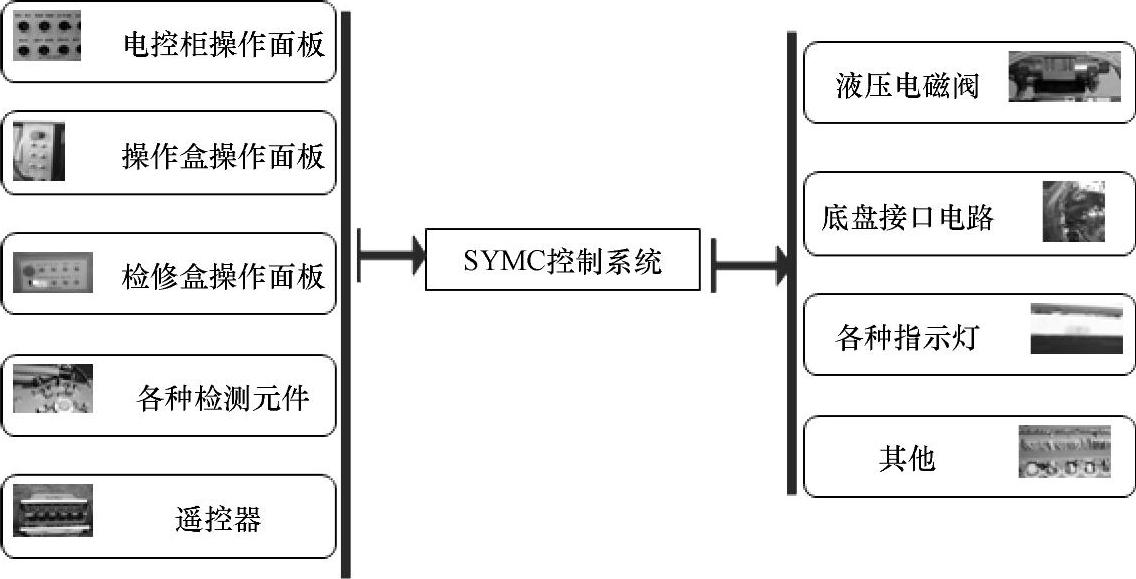
图4-61 电气控制系统示意图
(二)臂架遥控系统控制回路
如图4-65所示,遥控发射器发送信号给接收器,接收器根据收到的信号实现相应控制。分别控制发射器的左右旋转及一节臂至五节臂的伸缩摇杆,臂加动作时I1.0信号得电,底盘柴油机开始升速至设定转速,遥控器发信号给接收器直接控制相应的电比例阀,左右旋转阀为DT16、DT17,四节臂伸缩阀为DT18、DT19,三节臂伸缩阀为DT20、DT21,二节臂伸缩阀为DT22、DT23,一节臂伸缩阀为DT24、DT24,五节臂伸缩阀为DT26、DT27(注:当一节臂架收到位后,缩回阀则不再得电)。以上操作可在发射器上选择动作的快慢。
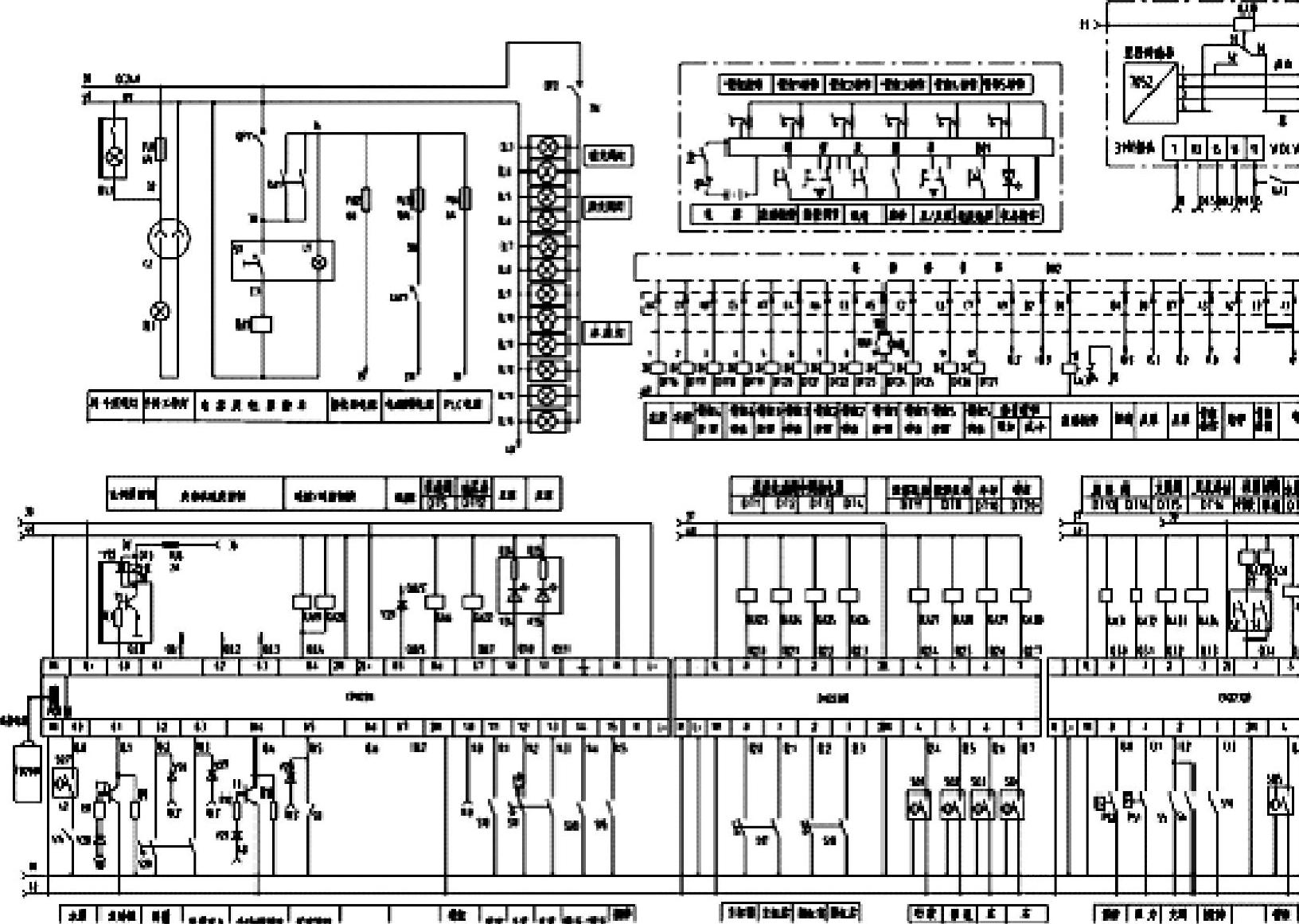
图4-62 泵车电气原理图
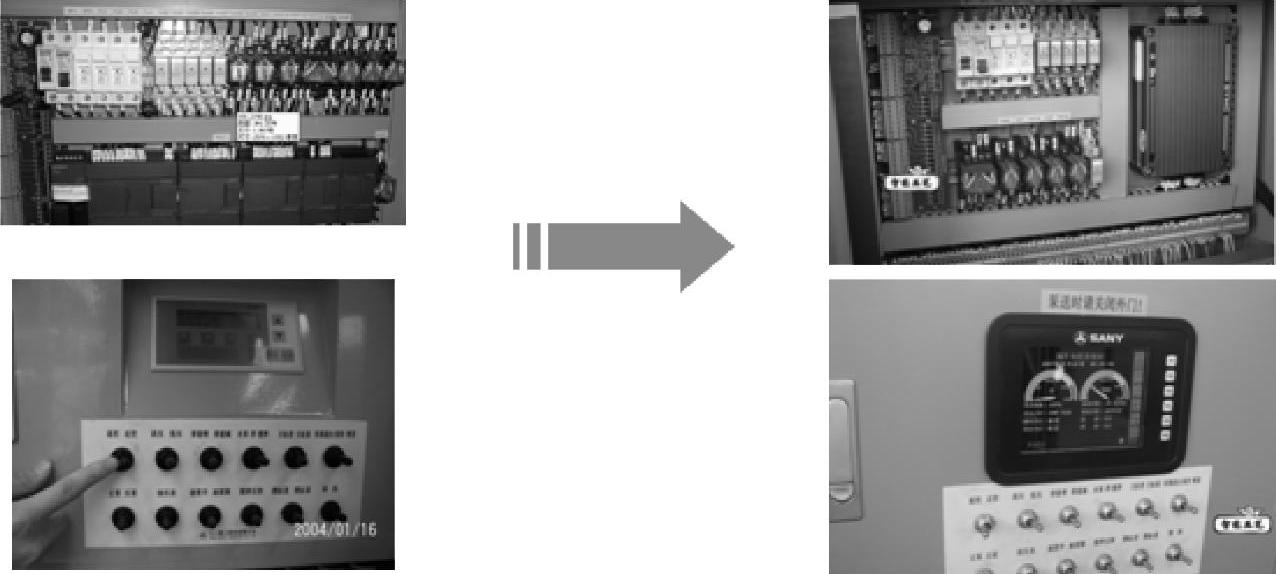
图4-63 电控实物图
(三)各种底盘测速、调速及接口控制回路
1.VOLVO底盘
如图4-66所示,泵送时中间继电器KA10得电,断开里程表信号,行驶时线路恢复,里程表根据传感器送来的信号开始计量里程。
VOLVO底盘提供一个31针插头,分动箱速度信号由插头的7脚提供,升降速信号(Q0.5为巡航,Q0.2为升速,Q0.1为降速)送入插头的13、15、16脚,当Q0.5、Q0.2为高电平时底盘柴油机升速,Q0.5、Q0.1为高电平时底盘柴油机降速。
发动机熄火由中间继电器KA3的一对触点给17脚送入一个高电平。
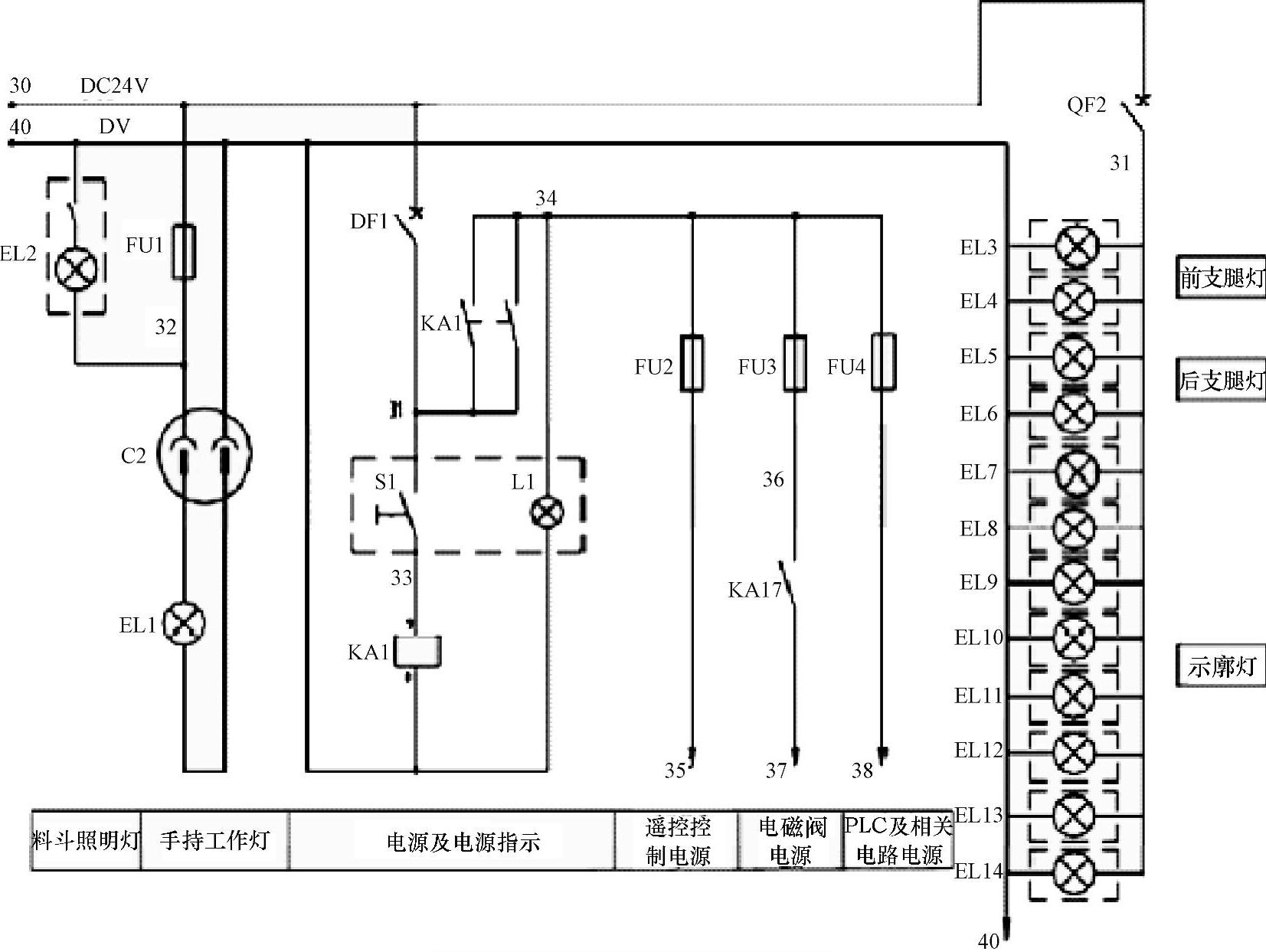
图4-64 电源及工作灯控制回路
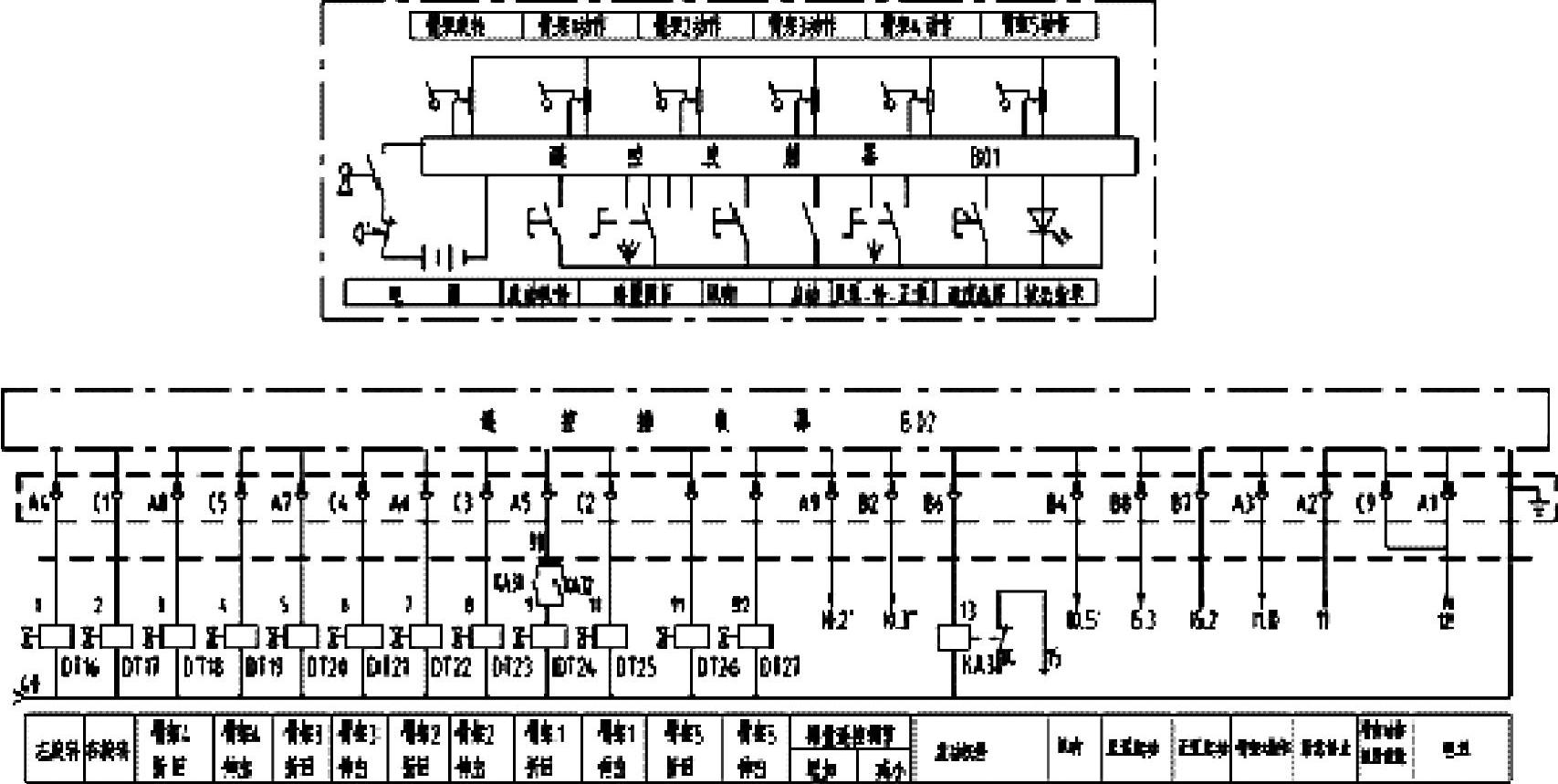
图4-65 臂架遥控系统控制回路
2.五十铃底盘
如图4-67所示,泵送时由继电器的常闭点(16、17号线)断开里程表传感器信号,行驶时线路恢复,里程表开始正常计量;分动箱速度信号(18号线)由传感器的白色线获取。
底盘发动机升降速信号由82号线送,速度的大小取决于82号线对80号线电压的大小(当82 号线电压由0.5V升至4.5V时,柴油机转速则由怠速升至底盘最高转速)。
发动机熄火由中间继电器KA3控制,KA3得电后断开线路,底盘熄火。
3.奔驰底盘
如图4-68所示,泵送时中间继电器KA10、KA11得电,分别断开里程表传感器的信号线,行驶时线路恢复,里程表开始正常计量;分动箱速度信号(18号线)由传感器的灰蓝色线获取。
升降速信号(Q0.5为巡航,Q0驾驶室插头X2的4、5脚、X3插头的10脚)送入底盘电脑,以实现速度的控制。
底盘熄火由X2插座的8、11脚控制,KA3得电时底盘熄火。
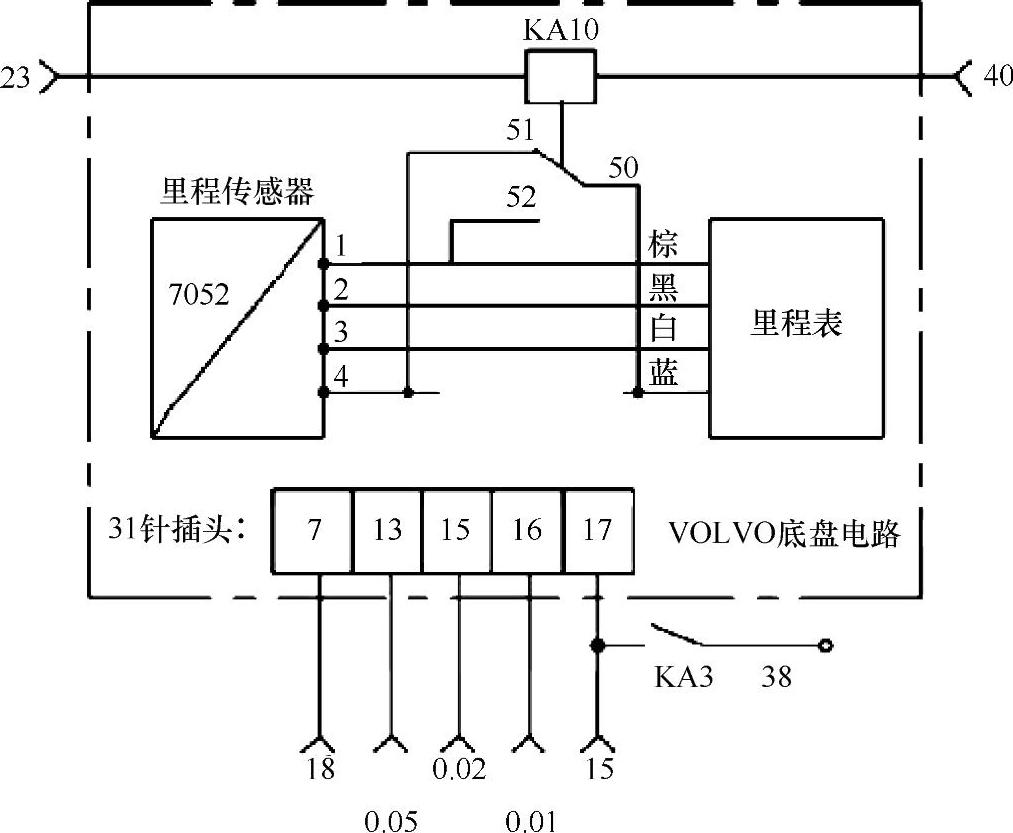
图4-66 VOLVO底盘接口电路
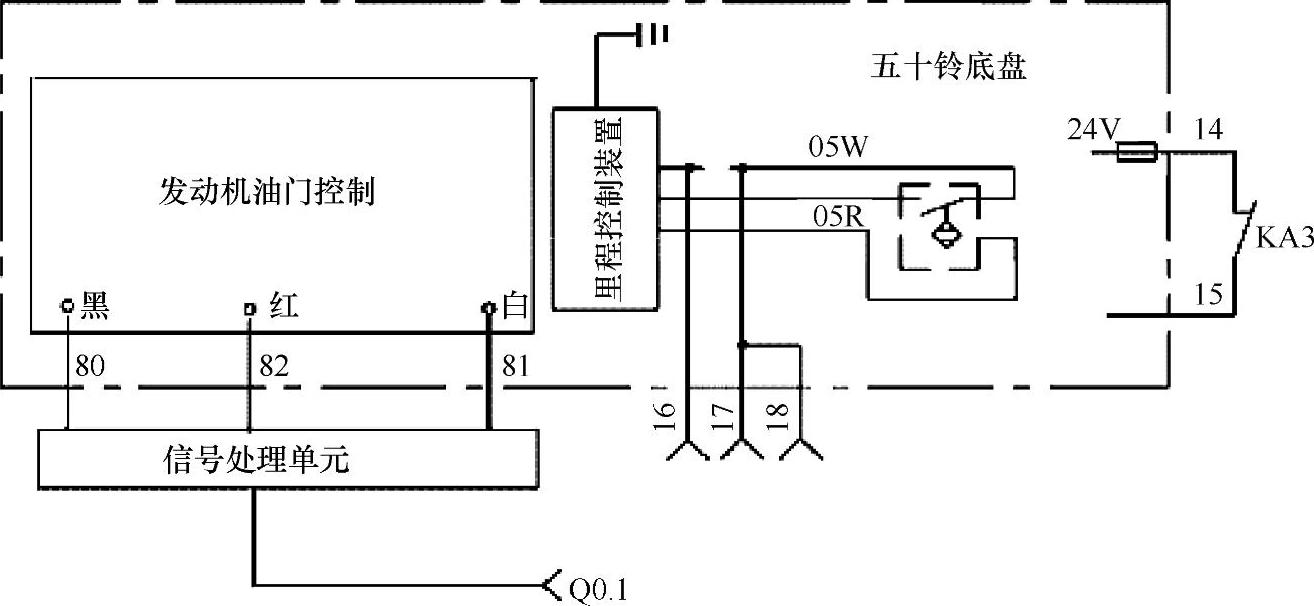
图4-67 五十铃底盘接口电路
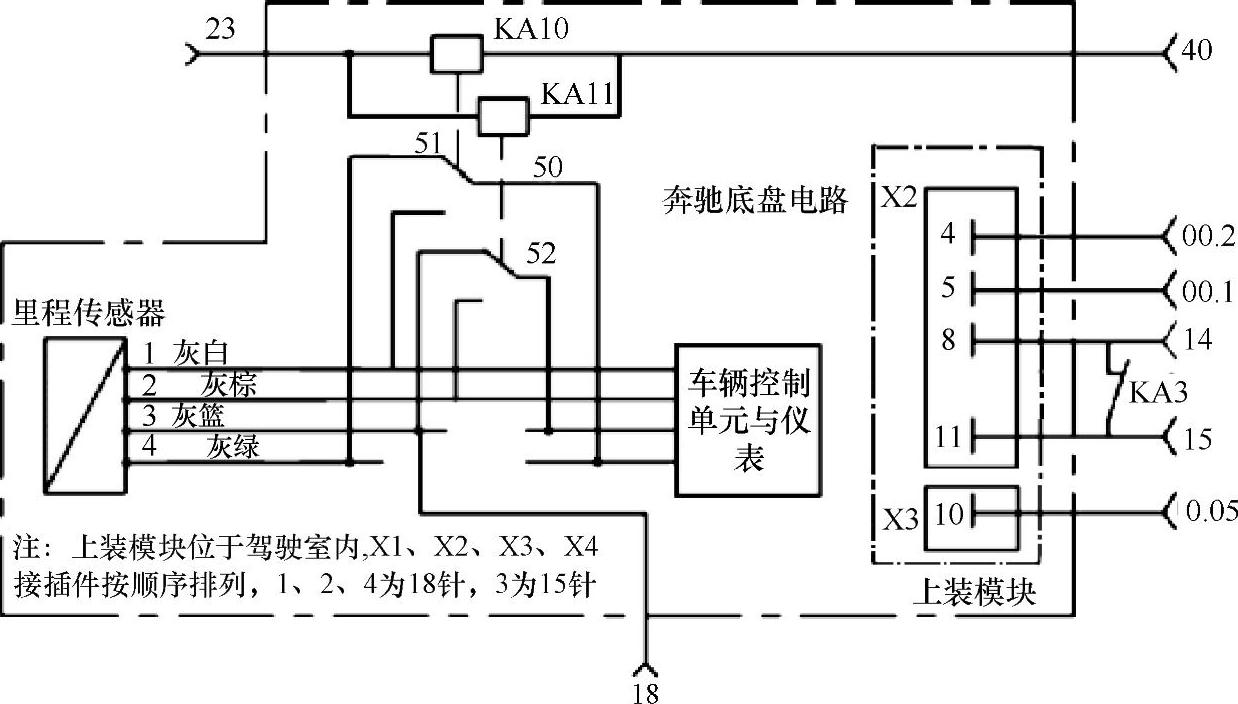
图4-68 奔驰底盘接口电路
(四)PLC控制回路
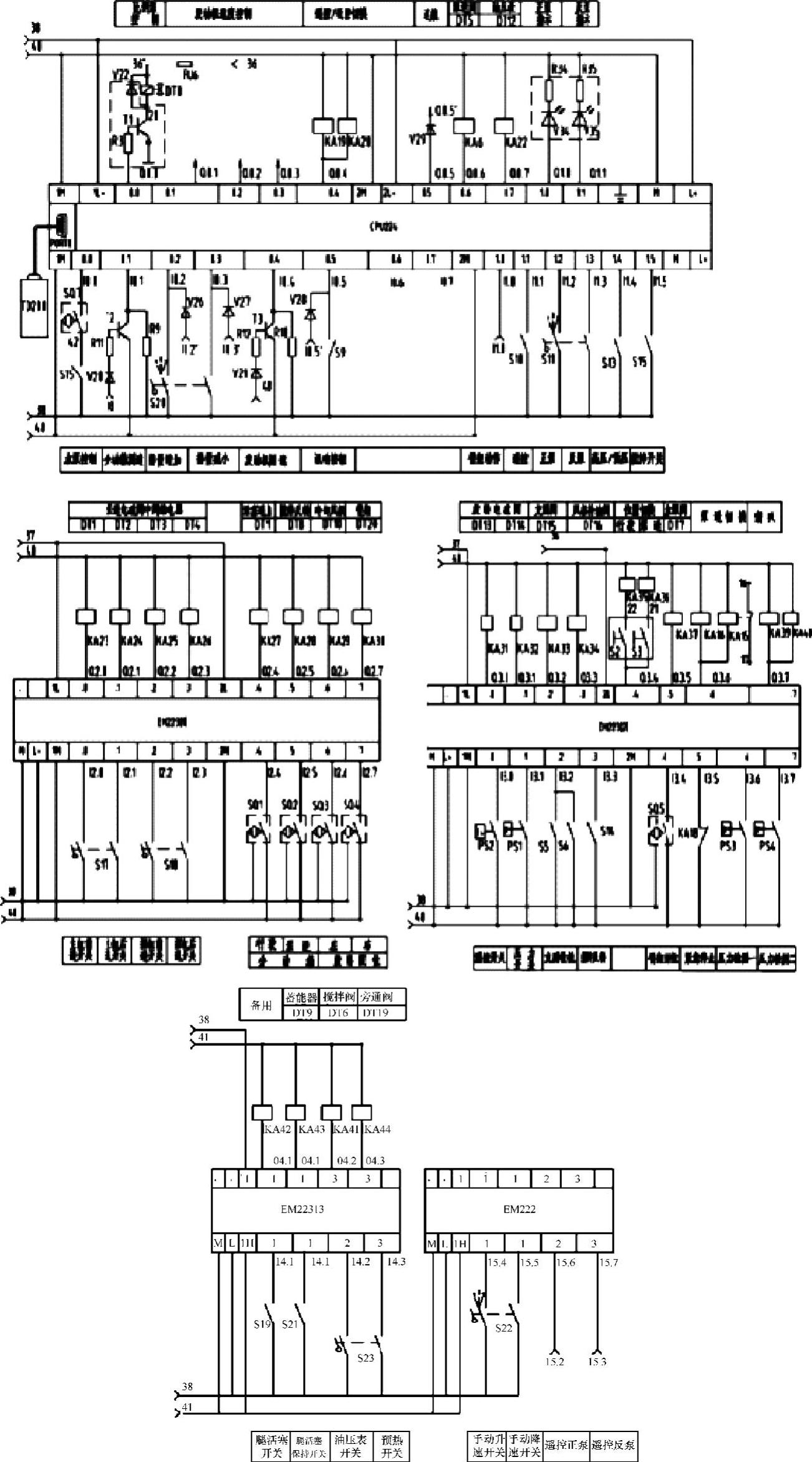
图4-69 PLC控制回路
1)可编程序控制器在系统中分为主模块和扩展模块两大类,主模块CPU224将一个微处理器、一个集成电源和数字输入/输出点集成在一个紧凑的封装中,从而形成了一个功能强大的微型控制器,其他扩展模块主要是扩充完善CPU功能,增加I/O点的个数。
2)如图4-69所示,CPU224为主模块,下部为输入点,0.0-1.5输入点定义地址为I0.0-I1.5,上部为输出点,0.0-1.1输出点定义地址为Q0.0-Q1.1,其他扩展模块的每个I/ O点均对应一个地址,在面板上的对应指示灯点亮。
3)各种功能简述如下:
洗(I0.0):水箱中有水时,按下水洗开关,10.0得电,水洗电磁阀Q3.5得电(如为低速水泵,则速度必须要低于850rpm,Q3.5才能得电)。
测速(I0.1):里程传感器信号(18号线)经过放大处理后送入PLC的I0.1口,此处运用PLC的高速计数功能,PLC再根据脉冲个数的多少计算出分动箱的相应转速。
排量调节(I0.2、I0.3):近/遥控的排量增加减少信号由I0.2、I0.3送入,以改变Q0.0电压的大小,即电比例阀DT0电流的大小。
讯响(I0.5):按下电控柜或遥控器上的喇叭按钮,I0.5得电后Q3.7得电,以控制臂架上的电喇叭或底盘喇叭。
架动作(I1.0):遥控状态时操作臂架动作,I1.0得电,底盘柴油机开始升速,停止动臂架后,I1.0失电,经过几秒后柴油机自动降至怠速。
近/遥控转换(I1.1):操作电控柜上的近遥控转换开关,I1.1得电,系统切换至遥控状态,Q0.4得电,注:近/遥控转换只能在空闲状态(非正、反泵、退活塞等工况)时进行转换。
/反泵(I1.2、I1.3):近控时操作正反泵开关,I1.2、I1.3分别得电,底盘柴油机升速至设定转速后相应的电磁阀得电,泵送开始。
高低压(I1.4):选择泵送时的高低压状态,系统默认为低压状态,当I1.4得电后,系统转换为高压状态,小排量泵车Q0.6得电。
搅拌(I1.5):将开关切换到搅拌位置(Q4.2得电)。(https://www.daowen.com)
主缸点动(I2.0、I2.1):操作点动前进(I2.0得电)或后退(I2.1得电)钮子开关,相应电磁阀得电。
摆缸点动(I2.2、I2.3):操作点动前进(I2.2得电)与后退(I2.3得电)钮子开关时,泵车相应电磁阀动作。
行驶/泵送检测(I2.4、I2.5):分动箱位置检测的输入点,行驶位置时I2得电,用于判断分动箱所处状态。
旋转限位检测(I2.6、I2.7):正常情况时臂架可正常左右旋转(Q3.0、Q3.1得电),当左旋转到位后检测开关I2.6得电,Q3.0失电,臂架则无法再向左旋转;右旋转到位后检测开关I2.7得电,Q3.1失电,臂架则无法再向右旋转。
风冷控制(I3.0):温控开关工作后(I3.0得电),冷却风机启动(Q2.6得电),并且风机补油阀工作(Q3.3得电)。
搅拌反转(I3.1、I3.3):压力开关动作(I3.1)或搅拌反转开关(I3.3)启动,Q2.5得电搅拌轴开始反转,当搅拌反转信号消失,搅拌轴延时搅拌8S后自动停止反转。
支腿动作(I3.2):操作支腿动作开关(I3.2得电),底盘柴油机升速至1000r/min,支腿阀工作(Q3.2得电)。
臂架到位(I3.4):臂架放到位后(I3.4得电),才允许动支腿,此时不允许旋转臂架。
紧急停止(I3.5):按下电控柜或遥控器上的急停按钮(I3.5得电),文本显示器提示“紧急停止”,此时无法进行任何操作。
缓冲控制(I3.6、I3.7):泵送换向时,压差传感器I3.6、I3.7依次动作,主油泵排量换向时自动减小,以实现缓冲控制。
退活塞(I4.0、I4.1):活塞退出时泵车底盘柴油机自动升至设定转速,可实现活塞的退出、保持与停止。
油压表与预热开关(I4.2、I4.3):操作开关转换至油压表(I4.2得电)或预热(I4.3得电)位置,分别启动油压表开关阀(Q0.7得电)或预热功能的各电磁阀。
手动升降速(I5.4、I5.5):升速为I5.4得电,降速为I5.5得电,可通过旋钮开关手动调节底盘柴油机速度。
遥控正反泵(I5.6、I5.7):遥控状态时,正泵为I5.6得电,反泵为I5.7得电。
(五)电磁阀驱动回路
电磁阀驱动回路实物如图4-70所示。

图4-70 实物图
由于PLC输出点的驱动能力不够,电磁阀均经中间继电器驱动,如图4-71所示,各电磁阀动作如下:
正泵:小排量泵车:DT1、DT2、DT9
大排量泵车:高压:DT1、DT2、DT9
低压:DT1、DT3、DT9
反泵:小排量泵车:DT1、DT3、DT4、DT9
大排量泵车:高压:DT1、DT2、DT4、DT5、DT9
低压:DT1、DT3、DT4、DT5、DT9
点动前进:小排量泵车:DT1、DT3、DT4、DT9
大排量泵车:DT1、DT3、DT4、DT5、DT9
点动后退:小排量泵车:DT1、DT3、DT9
大排量泵车:DT1、DT3、DT4、DT9
摆缸前进:DT9
摆缸后退:小排量泵车:DT4、DT9
大排量泵车:DT5、DT9
退活塞:小排量泵车:退出:DT1、DT3、DT5、DT9、DT11
保持:DT3、DT5、DT9、DT11
取消:DT3、DT5、DT9
大排量泵车:退出:DT1、DT2、DT4、DT9、DT11
保持:DT2、DT4、DT9、DT11
取消:DT2、DT4、DT9
搅拌反转:DT6、DT8搅拌:DT6
水泵:DT7
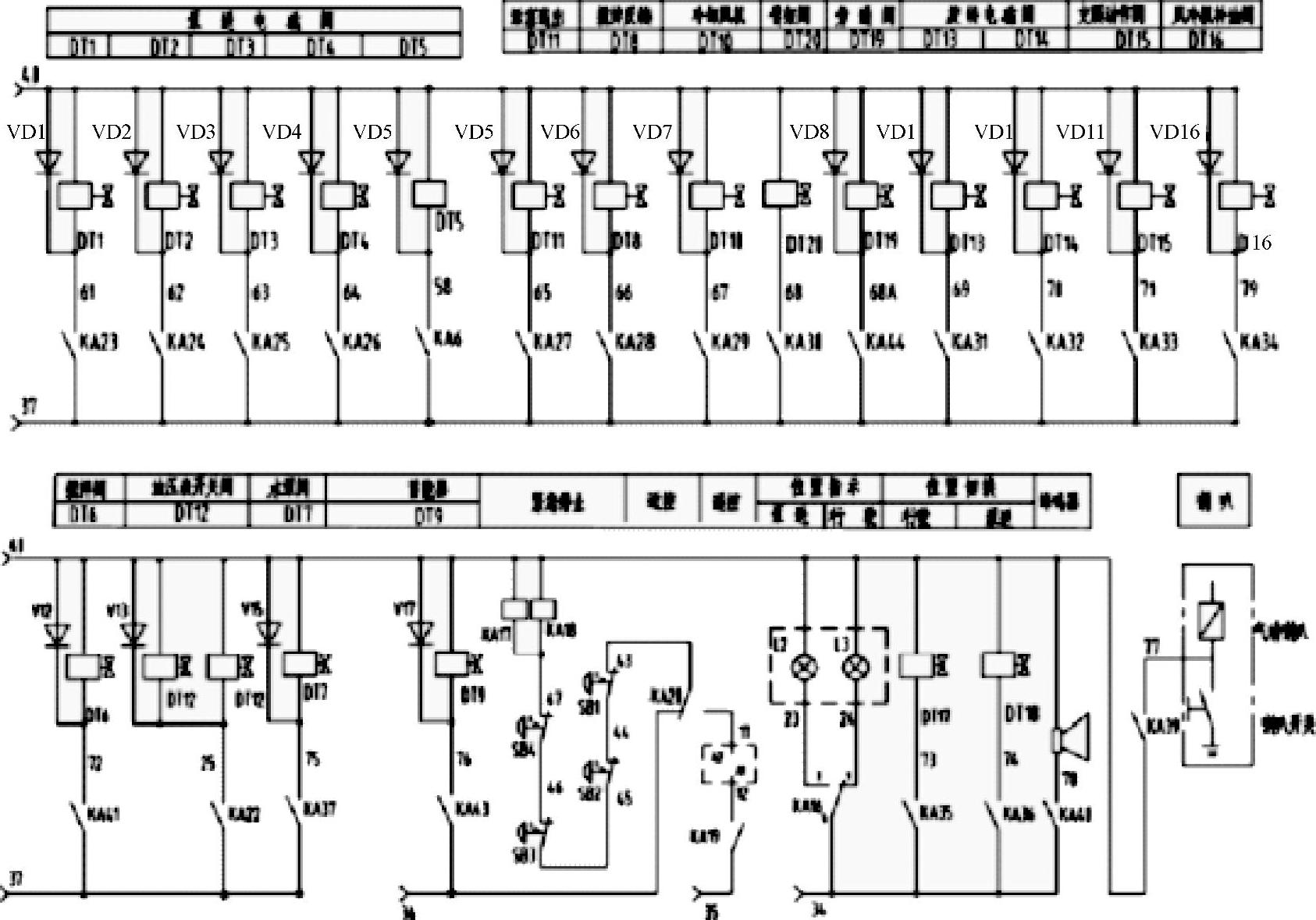
图4-71 电磁阀驱动回路及其他控制回路
VD1-VD17为续流二极管,由于电磁阀是感性负载,在断电瞬间产生高压反向自感电势,该自感电势在断电时会加在中间继电器的触点上,对触点的使用寿命有影响,加续流二极管主要防止高压反向自感电势对继电器触点的影响,提高触点使用寿命。
(六)GPRS/GPS远程监控系统
以三一自主开发的智能化工程机械机群通讯网络与定位模块SYMT为核心,采用当前先进的无线通信技术和控制技术,构造了混凝土泵车远程监控系统。如图4-72所示。
该系统具有以下主要功能:
1)机器定位。不论机器在什么地方,通过三一的GPS远程监控中心的监测定位,都能找到机器的准确位置。
2)远程工况监测。三一的GPS中心通过数据请求,可以将相关的工况数据上传到总部,进行数据分析,故障诊断。
3)用户提醒。对机器存在的隐患和定期要做的保养,在人机界面上文字提醒。
4)远程程序升级。可以远程上传和下载控制程序。
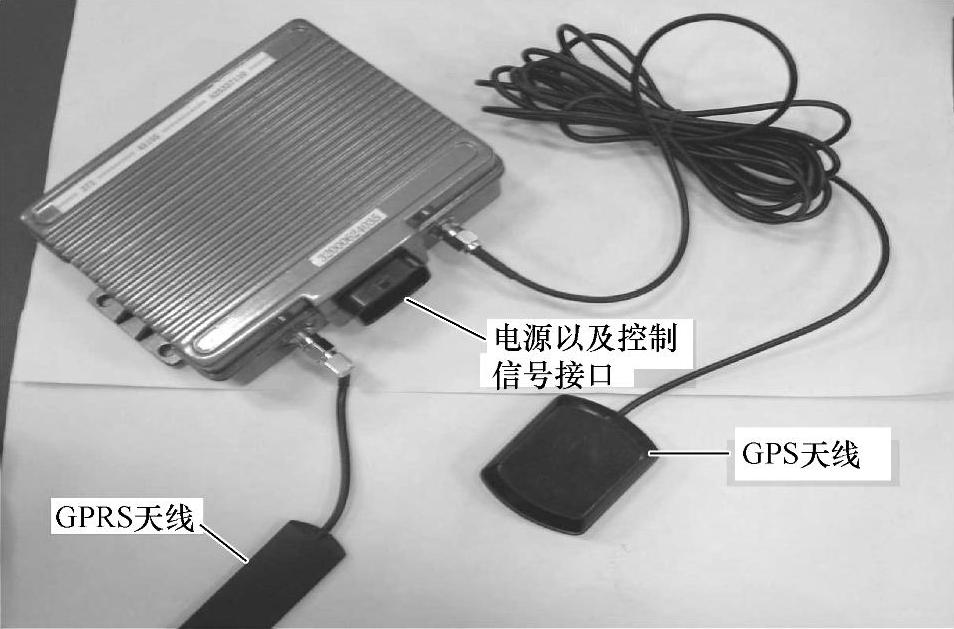
图4-72 GPRS/GPS远程监控系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





