制作思路
本节将对一个压力机机构进行动态分析,使大家对动态分析有更进一步的了解。
1.打开模型
(1)启动Creo Parametric 2.0,单击工具栏中的【打开】按钮 ,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0705│ch070502文件中的“
,弹出【打开】对话框,打开随书光盘源文件│ch07│ch0705│ch070502文件中的“ ”,如图7-141所示。
”,如图7-141所示。
(2)单击【文件】→【管理会话】→【选择工作目录】,设置工作目录至ch07│ch0705│ch070502。
2.定义质量属性
(1)单击【应用程序】→【机构】,进入运动仿真模块。
(2)单击工具栏中的【质量属性】按钮 ,系统弹出【质量属性】对话框。
,系统弹出【质量属性】对话框。
(3)在【参考类型】下拉菜单中选择【装配】选项,选择【模型树】上的组件“CRANK- SLIDER.ASM”,设置其密度为7.8e-9,如图7-142所示,单击【确定】按钮,完成质量属性的定义。
图7-141 装配体

图7-142 质量属性对话框
3.定义重力
单击工具栏中的【重力】按钮 ,系统弹出【重力】对话框,在对话框中的X、Z方向上输入0,Y方向上输入-1,接受默认的模大小,如图7-143所示,单击【确定】按钮,完成重力的定义。
,系统弹出【重力】对话框,在对话框中的X、Z方向上输入0,Y方向上输入-1,接受默认的模大小,如图7-143所示,单击【确定】按钮,完成重力的定义。
4.定义伺服电动机
(1)单击工具栏中的【伺服电动机】按钮 ,系统弹出【伺服电动机定义】和【选择】对话框,如图7-144所示。
,系统弹出【伺服电动机定义】和【选择】对话框,如图7-144所示。

图7-143 重力对话框
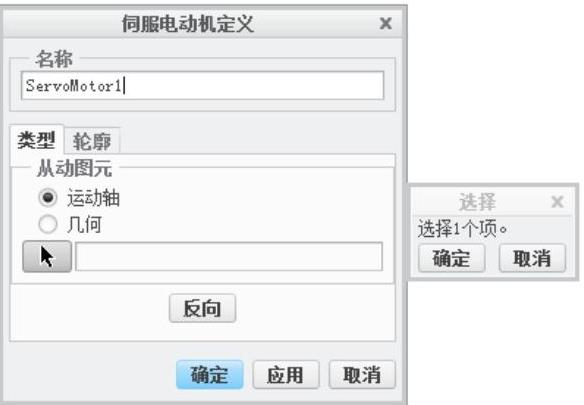
图7-144 伺服电动机定义对话框
(2)在【从动图元】中选择【运动轴】,在绘图窗口中选择【Connection_4.axis_1】作为运动轴,如图7-145所示。
(3)单击【轮廓】选项卡,在【规范】下拉列表中选择【速度】选项,在【模】下拉列表中选择【常数】选项,在A输入框中输入速度值30,如图7-146所示,单击【确定】按钮,完成伺服电动机的定义。
5.定义阻尼器
(1)单击工具栏中的【阻尼器】按钮 ,系统弹出阻尼器操控板,如图7-147所示。
,系统弹出阻尼器操控板,如图7-147所示。
(2)选择【拉伸/压缩】阻尼器类型 ,单击【参考】按钮,选择图7-148所示的运动轴定义阻尼器的位置。
,单击【参考】按钮,选择图7-148所示的运动轴定义阻尼器的位置。
(3)输入阻尼系数 为10。
为10。
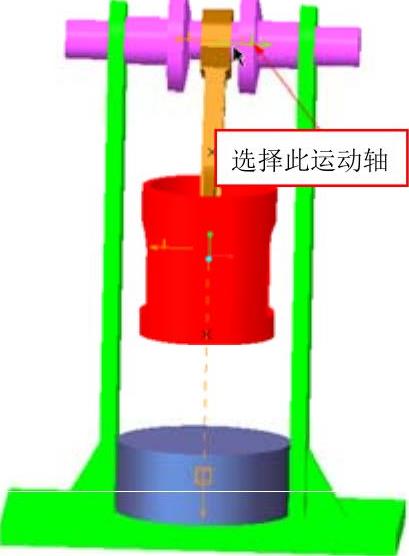
图7-145 选择运动轴
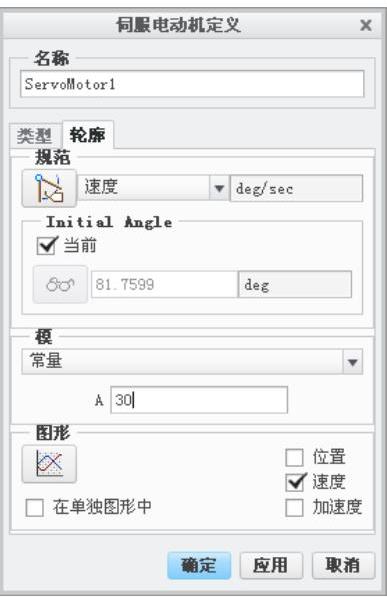
图7-146 伺服电动机定义对话框(https://www.daowen.com)

图7-147 阻尼器操控板
(4)单击完成按钮 ,完成阻尼器的定义。
,完成阻尼器的定义。
6.机构的分析与定义
(1)单击工具栏中的【机构分析】按钮 ,系统弹出【分析定义】对话框。
,系统弹出【分析定义】对话框。
(2)在【类型】下拉列表中选择【动态】选项,在【持续时间】输入框中输入20,其他的参数接受默认值。单击【外部载荷】选项卡,如图7-149a所示,勾选【启用重力】复选框,如图7-149b所示,单击【运行】按钮,可以看到机构上下来回运动,单击【确定】按钮,完成模型的分析。
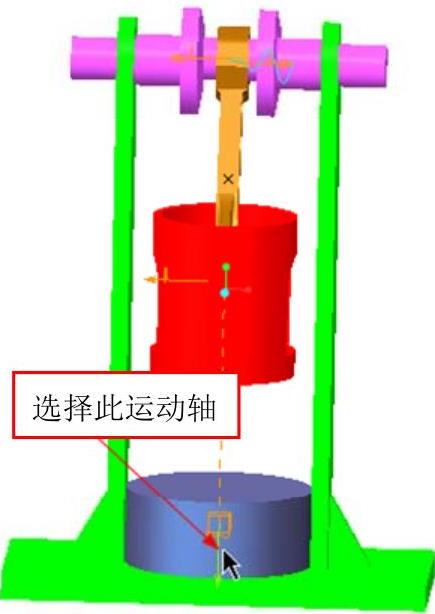
图7-148 选择运动轴
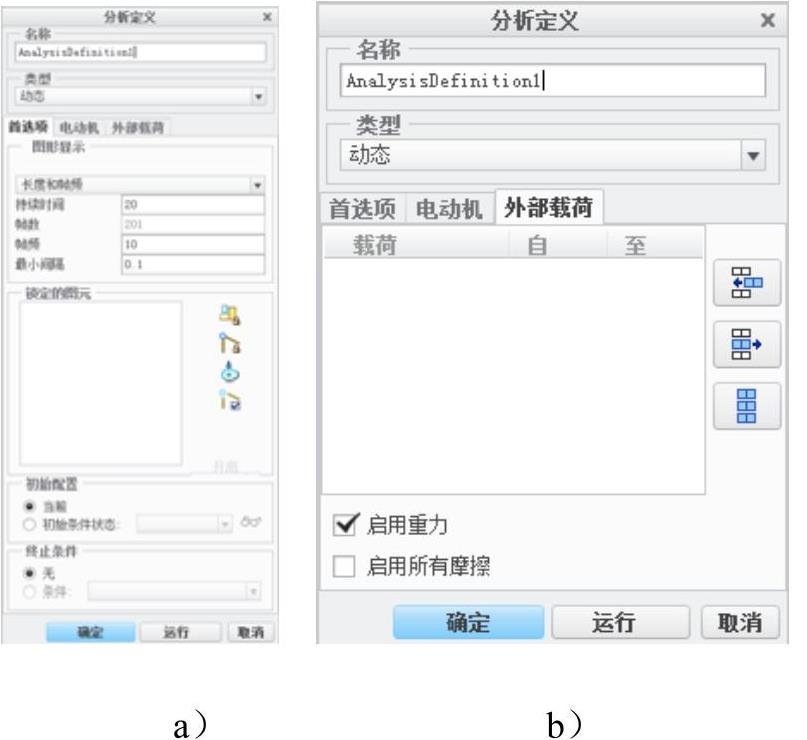
图7-149 分析定义对话框
7.查看测量
(1)单击工具栏中的【测量】按钮 ,系统弹出【测量结果】对话框,如图7-150所示。
,系统弹出【测量结果】对话框,如图7-150所示。
(2)单击对话框中【测量】区域的【创建新测量】按钮 ,弹出【测量定义】对话框,输入名称“position”,在【类型】下拉列表中选择【位置】项目;选择图7-151所示的SLIDER:PNT0作为测量参考;在弹出的【分量】下拉列表中选择【Y分量】选项,如图7-152所示,单击【确定】按钮。
,弹出【测量定义】对话框,输入名称“position”,在【类型】下拉列表中选择【位置】项目;选择图7-151所示的SLIDER:PNT0作为测量参考;在弹出的【分量】下拉列表中选择【Y分量】选项,如图7-152所示,单击【确定】按钮。
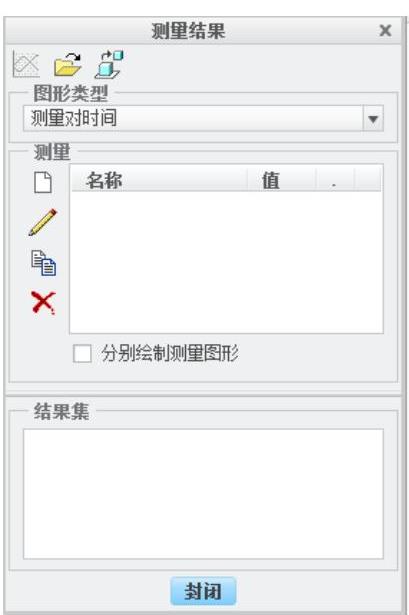
图7-150 测量结果对话框
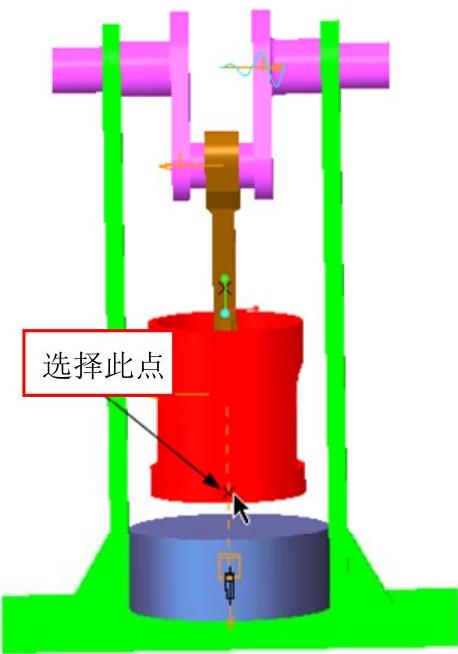
图7-151 选择基准点
(3)返回到【测量结果】对话框,单击创建的“position”后,单击【结果集】区域中的分析结果【analysisDefinitional】,然后单击对话框上部的的【绘制图形】按钮 ,弹出【图形工具】对话框,描述了点的位置变化情况,如图7-153所示。单击【文件】→【导出】命令,将图形以excel形式导出到指定位置。
,弹出【图形工具】对话框,描述了点的位置变化情况,如图7-153所示。单击【文件】→【导出】命令,将图形以excel形式导出到指定位置。

图7-152 测量定义对话框
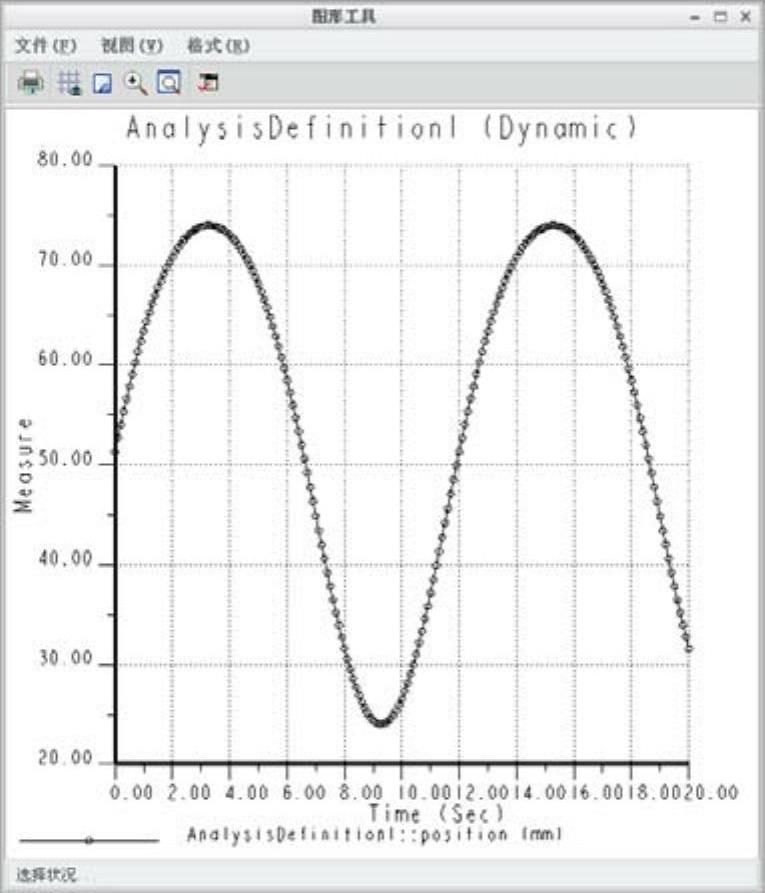
图7-153 图形工具对话框
8.保存分析结果
(1)单击【回放】按钮 ,系统弹出【回放】对话框,如图7-154所示。
,系统弹出【回放】对话框,如图7-154所示。
图7-154 回放对话框

图7-155 动画对话框
(2)单击【回放】对话框中的保存按钮 ,在指定的位置保存分析结果。
,在指定的位置保存分析结果。
(3)在【回放】对话框中单击按钮 ,系统弹出【动画】对话框,如图7-155所示。单击对话框中的【捕获】按钮,系统弹出【捕获】对话框。单击对话框中的【浏览】按钮,系统弹出【保存副本】对话框,指定保存位置,在【名称】输入框中输入视频名称“ch070502.mpg”,单击【确定】按钮,然后在【捕获】对话框中单击【确定】按钮,生成mpg视频文件。
,系统弹出【动画】对话框,如图7-155所示。单击对话框中的【捕获】按钮,系统弹出【捕获】对话框。单击对话框中的【浏览】按钮,系统弹出【保存副本】对话框,指定保存位置,在【名称】输入框中输入视频名称“ch070502.mpg”,单击【确定】按钮,然后在【捕获】对话框中单击【确定】按钮,生成mpg视频文件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





