本例的六轴关节型机械手要求PLC具备高速计数和高频脉冲输出功能。PLC通过高速计数端口接收轴编码器传回的脉冲反馈值,从而判断机械手各关节的实际位置;通过高频脉冲输出端口发送脉冲信号给步进电动机驱动器,步进电动机驱动器再将这些脉冲信号转换成电流驱动步进电动机旋转。
通过对PLC控制系统的文献检索和市场调研,确定了两种可行方案实现机械手的定位控制要求。方案一是用欧姆龙CJ1M PLC加上位置控制单元CJ1W-NC413(以下简称PCU)构成;方案二则是用两台CP1H PLC组成主从控制系统。
1.设计方案的技术论证
(1)CJ1M PLC加上PCU单元
CJ1M PLC属于小型PLC,它以体积小、速度快见长,采用多任务结构化的编程模式,它具有功能强、速度快、配置灵活、微型化等特点。CJ1M PLC的CPU单元具有高速中断输入处理功能、高速计数器功能和可调占空比的高频脉冲输出功能,可实现精确定位控制和速度控制,适用于高频计数与高频脉冲输出的系统。
PCU是CJ系列PLC的特殊输入/输出单元,用于实现精确的定位控制。它从PLC工作区接受指令并向不同的电动机驱动器输出脉冲序列用于定位。PCU可以有1、2或者4个轴。对于2或4个轴的PCU,其各轴可实现线性差补,各轴的输出类型包括开放式控制器输出和线路激励器输出。要根据控制轴的数量和期望的输出类型选择最适当的型号。
步进电动机驱动器和脉冲序列输入类型的伺服电动机驱动器可以与PCU相连。对不同的电动机允许使用不同类型的电动机驱动器,并设置不同的操作模式。PCU的定位范围在−1073741823~1073741823个脉冲内,每个脉冲序列的速度在1~500000 pps范围内。这意味着在大范围内可以实现精确的速度定位。
综上所述使用这种设计方案完全可以满足机械手的设计要求。
(2)2台CP1H PLC组成主从系统
CP1H PLC是欧姆龙公司在2005年推出的一款PLC,其CPU单元内置有24个输入点及16个输出点,可实现4个轴高速计数、4个轴脉冲输出。CP1H PLC的每个输入接点还可以通过对PLC系统进行设定或通过指令决定其在通用输出、输出中断、脉冲接收或高速计数中的任何一个状态下使用。
CP1H PLC的高速计数器可接收4个轴100kHz(单相)或50kHz(相位差)的脉冲信号,还可实现两个轴100kHz的脉冲输出和2个轴30kHz的脉冲输出。将2台CP1H PLC用RS-232C通信端口串行连接实现了两台PLC的数据共享,从而能控制6个轴的定位。
综上所述这种方案也可以满足机械手的设计要求。(https://www.daowen.com)
2.两种方案的经济性论证
在两种方案均满足技术要求的前提下,根据对设备价格的市场调研得出的结论是,方案一组成的控制系统成本是方案二的2.5倍左右。由上述分析可知,方案二的性价比远高于方案一,因此选择方案二来构建控制系统。
3.控制系统配置及接线
本例控制系统的核心是由2台CP1H PLC构成主从控制结构,如图9-4所示。它们通过RS-232C通信口进行串行通信。
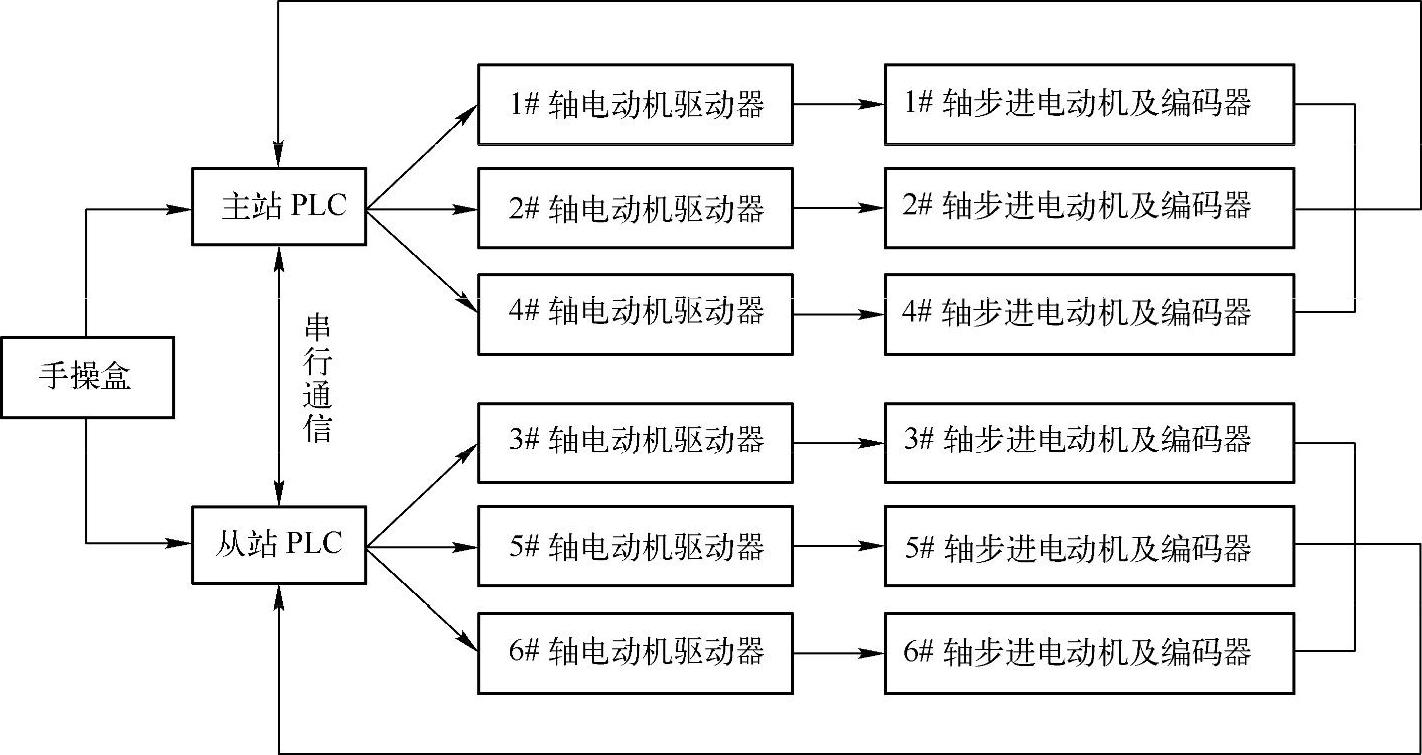
图9-4 机械手控制系统结构示意图
从图9-4可以看出,将机械手的6个轴分配给主、从两台PLC实施控制。其中1#轴、2#轴和4#轴分配给主PLC,分别由其3#脉冲输出、0#脉冲输出和2#脉冲输出控制,按接线要求将三个轴的步进电动机、驱动器、编码器及控制按钮接到指定位置。将机械手的3#轴、5#轴和6#轴分配给从PLC,分别由其0#脉冲输出、2#脉冲输出和3#脉冲输出控制,按接线要求将这三个轴的步进电动机、驱动器、编码器及控制按钮接到指定位置。
手操盒上的控制按钮分为两类,一类为示教时控制单轴脉冲输出的手动按钮,如“1轴顺”、“1轴逆”等;另一类为功能按钮,如“复位”、“示教”、“起动”与“停止”等。其中1#、2#和4#轴的手动按钮接到主PLC的输入端;3#、5#和6#轴的手动按钮接到从PLC的输入端。功能按钮同时接到主PLC和从PLC的输入端。手操盒的按钮布置如图9-5所示。
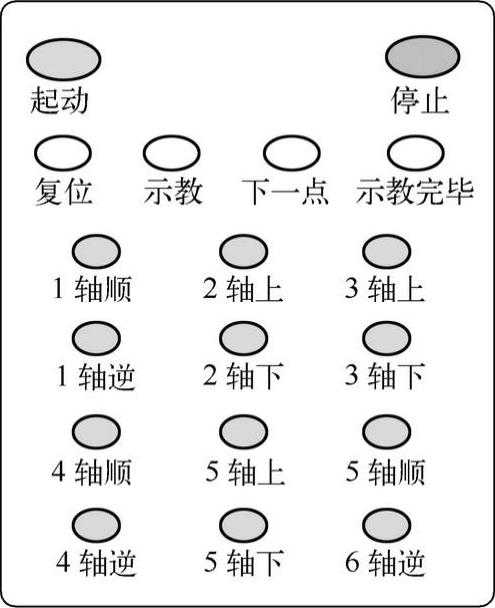
图9-5 手操盒按钮布置图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




