创建运动机构模型是指在零件设计完成后,采用“连接”的方式来装配零件模型。如果将一个元件以机械约束的方式添加到机构模型中,则该元件相对于依附元件具有某种运动的自由度。
添加连接元件的方法与添加固定元件大致相同,进入装配环境后,首先单击 功能选项卡
功能选项卡 区域中的“组装”按钮
区域中的“组装”按钮 ,并打开一个元件,系统弹出图2.3.1所示的“元件放置”操控板,在操控板的“约束集”列表框中,可看到系统提供了多种“连接”类型(如刚性、销和滑动杆等),各种连接类型允许不同的运动自由度,每种连接类型都与一组预定义的放置约束相关联。例如,一个销钉(Pin)连接需要定义一个
,并打开一个元件,系统弹出图2.3.1所示的“元件放置”操控板,在操控板的“约束集”列表框中,可看到系统提供了多种“连接”类型(如刚性、销和滑动杆等),各种连接类型允许不同的运动自由度,每种连接类型都与一组预定义的放置约束相关联。例如,一个销钉(Pin)连接需要定义一个 约束和一个
约束和一个 (即平面对齐或点对齐)约束,这样销钉连接元件就具有一个旋转自由度,而没有平移自由度,也就是说该元件可以相对于依附元件旋转,但不能移动。
(即平面对齐或点对齐)约束,这样销钉连接元件就具有一个旋转自由度,而没有平移自由度,也就是说该元件可以相对于依附元件旋转,但不能移动。

图2.3.1 “元件放置”操控板
在向机构装置中添加一个“连接”元件前,应知道该元件与装置中其他元件间的放置约束关系、相对运动关系和该元件的自由度。
“连接”的意义在于:
●定义一个元件在机构中可能具有的运动方式。
●限制主体之间的相对运动,减少系统可能的总自由度。
向装配件中添加连接元件与添加固定元件的相似之处为:
●两种方法都使用Creo的装配约束进行元件的放置。
●装配件和子装配件之间的关系相同。
向装配件中添加连接元件与添加固定元件的不同之处为:
●向装配件中添加连接元件时,定义的放置约束为不完全约束模型。系统为每种连接类型提供了一组预定义的放置约束(如销钉连接的约束集中包含“轴对齐”和“平移”两个约束),各种连接类型允许元件以不同的方式运动。
●当为连接元件的放置选取约束参考时,要反转平面的方向,可以进行反向,而不是配对或对齐平面。
●添加连接元件时,可以为一个连接元件定义多个连接。在一个元件中增加多个连接时,第一个连接用来放置元件,最后一个连接认为是环连接。
●Creo将连接的信息保存在装配件文件中,这意味着父装配件继承了子装配件中的连接定义。
下面以图2.3.2所示的连杆机构为例,说明创建运动机构模型的一般过程。
说明:本章后续有关机构运动仿真与分析的一般操作过程的内容均以图2.3.2所示的模型为范例进行介绍,其内容具有连贯性,请读者合理安排学习时间。
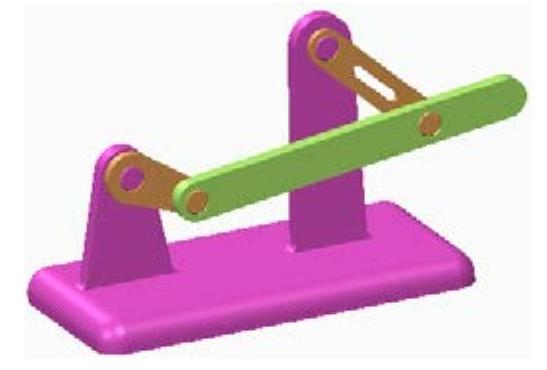
图2.3.2 连杆机构模型
Stage1.新建装配模型
Step1.选择下拉菜单 命令,将工作目录设置为D:\creo2.16\work\ch02\ch02.03。
命令,将工作目录设置为D:\creo2.16\work\ch02\ch02.03。
Step2.单击“新建”按钮 ,在弹出的“新建”对话框中,进行下列操作:
,在弹出的“新建”对话框中,进行下列操作:
(1)选中 选项组下的
选项组下的 单选项。
单选项。
(2)选中 选项组下的
选项组下的 单选项。
单选项。
(3)在 文本框中输入文件名linkage_mech。
文本框中输入文件名linkage_mech。
(4)通过取消 复选框中的“√”号,来取消“使用默认模板”。
复选框中的“√”号,来取消“使用默认模板”。
(5)单击该对话框中的 按钮。
按钮。
Step3.在系统弹出的“新文件选项”对话框(图2.3.3)中,进行下列操作:
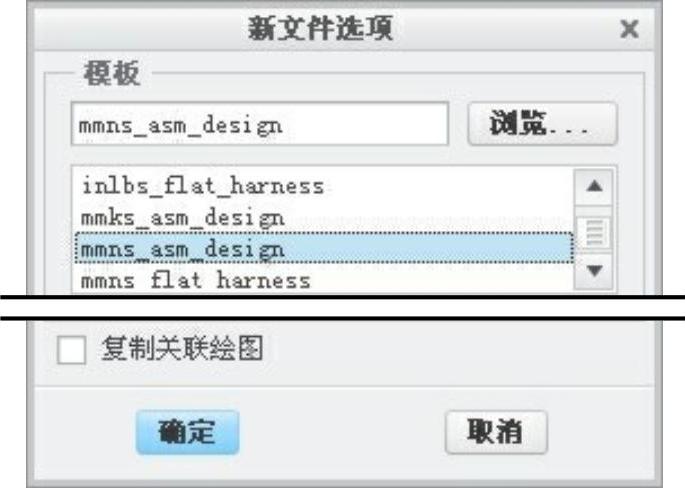
图2.3.3 “新文件选项”对话框
(1)选取适当的装配模板。在模板选项组中,选取 模板命令。
模板命令。
(2)对话框中的两个参数DESCRIPTION和MODELED_BY与PDM有关,一般不对此进行操作。
(3) 复选框一般不用进行操作。
复选框一般不用进行操作。
(4)单击该对话框中的 按钮。
按钮。
完成这一步操作后,系统进入装配模式(环境),此时在图形区可看到三个正交的装配基准平面(图2.3.4)。
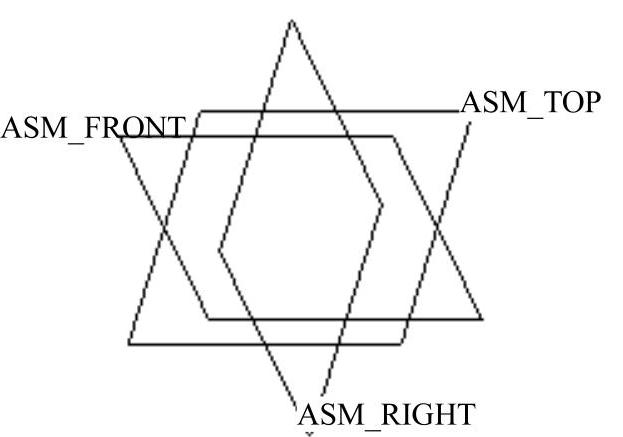
图2.3.4 三个默认的基准平面
Step4.隐藏装配基准。
(1)设置模型树的显示项目。在模型树界面中,选择 命令;在弹出的“模型树项”对话框中,选中
命令;在弹出的“模型树项”对话框中,选中 复选框,然后单击对话框中的
复选框,然后单击对话框中的 按钮。
按钮。
(2)隐藏基准平面。在模型树中选取基准平面ASM_RIGHT、ASM_TOP、ASM_FRONT并右击,从快捷菜单中选择 命令。
命令。
Stage2.增加第一个固定元件:基座(base)零件
Step1.引入基座零件。
(1)单击 功能选项卡
功能选项卡 区域(图2.3.5)中的“组装”按钮
区域(图2.3.5)中的“组装”按钮 (或单击
(或单击 按钮),在弹出的菜单中选择
按钮),在弹出的菜单中选择 选项,如图2.3.6所示。
选项,如图2.3.6所示。

图2.3.5 “元件”区域 图2.3.6 “组装”子菜单
 区域及
区域及 菜单下的命令说明如下:
菜单下的命令说明如下:
● :将已有的元件(零件、子装配件或骨架模型)装配到装配环境中。用“元件放置”对话框,可将元件完整地约束在装配件中。
:将已有的元件(零件、子装配件或骨架模型)装配到装配环境中。用“元件放置”对话框,可将元件完整地约束在装配件中。
● (创建):选择此命令,可在装配环境中创建不同类型的元件:零件、子装配件、骨架模型及主体项目,也可创建一个空元件。
(创建):选择此命令,可在装配环境中创建不同类型的元件:零件、子装配件、骨架模型及主体项目,也可创建一个空元件。
● (重复):使用现有的约束信息在装配中添加一个当前选中零件的新实例,但是当选中零件以“默认”或“固定”约束定位时无法使用此功能。
(重复):使用现有的约束信息在装配中添加一个当前选中零件的新实例,但是当选中零件以“默认”或“固定”约束定位时无法使用此功能。
● :选择此命令可将元件不加装配约束地放置在装配环境中,它是一种非参数形式的元件装配。
:选择此命令可将元件不加装配约束地放置在装配环境中,它是一种非参数形式的元件装配。
● :选择此命令,可在活动组件中包括未放置的元件。
:选择此命令,可在活动组件中包括未放置的元件。
● :选择此命令可以向所选的组件添加挠性元件(如弹簧)。
:选择此命令可以向所选的组件添加挠性元件(如弹簧)。
(2)此时系统弹出文件“打开”对话框,选择基座零件模型文件base.prt,然后单击 按钮。此时系统弹出“元件放置”操控板,并在图形区中显示图2.3.7所示的模型。
按钮。此时系统弹出“元件放置”操控板,并在图形区中显示图2.3.7所示的模型。
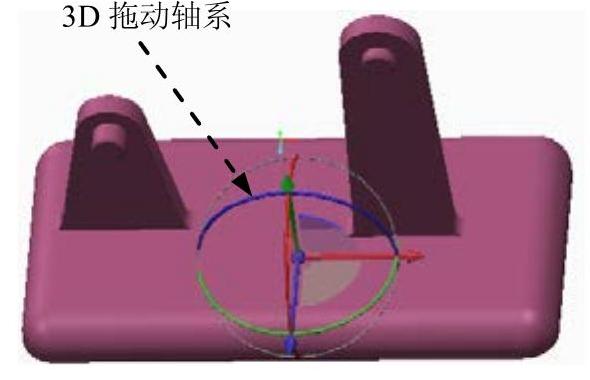
图2.3.7 引入基座零件
Step2.完全约束放置基座零件。
(1)在图2.3.8所示的“元件放置”操控板中单击 按钮,隐藏图2.3.7所示的3D拖动轴系。
按钮,隐藏图2.3.7所示的3D拖动轴系。
(2)单击 按钮,在
按钮,在 下拉列表中选择
下拉列表中选择 选项,将元件按默认放置,此时操控板中显示的信息为
选项,将元件按默认放置,此时操控板中显示的信息为 ,说明零件已经完全约束放置;单击操控板中的
,说明零件已经完全约束放置;单击操控板中的 按钮。
按钮。
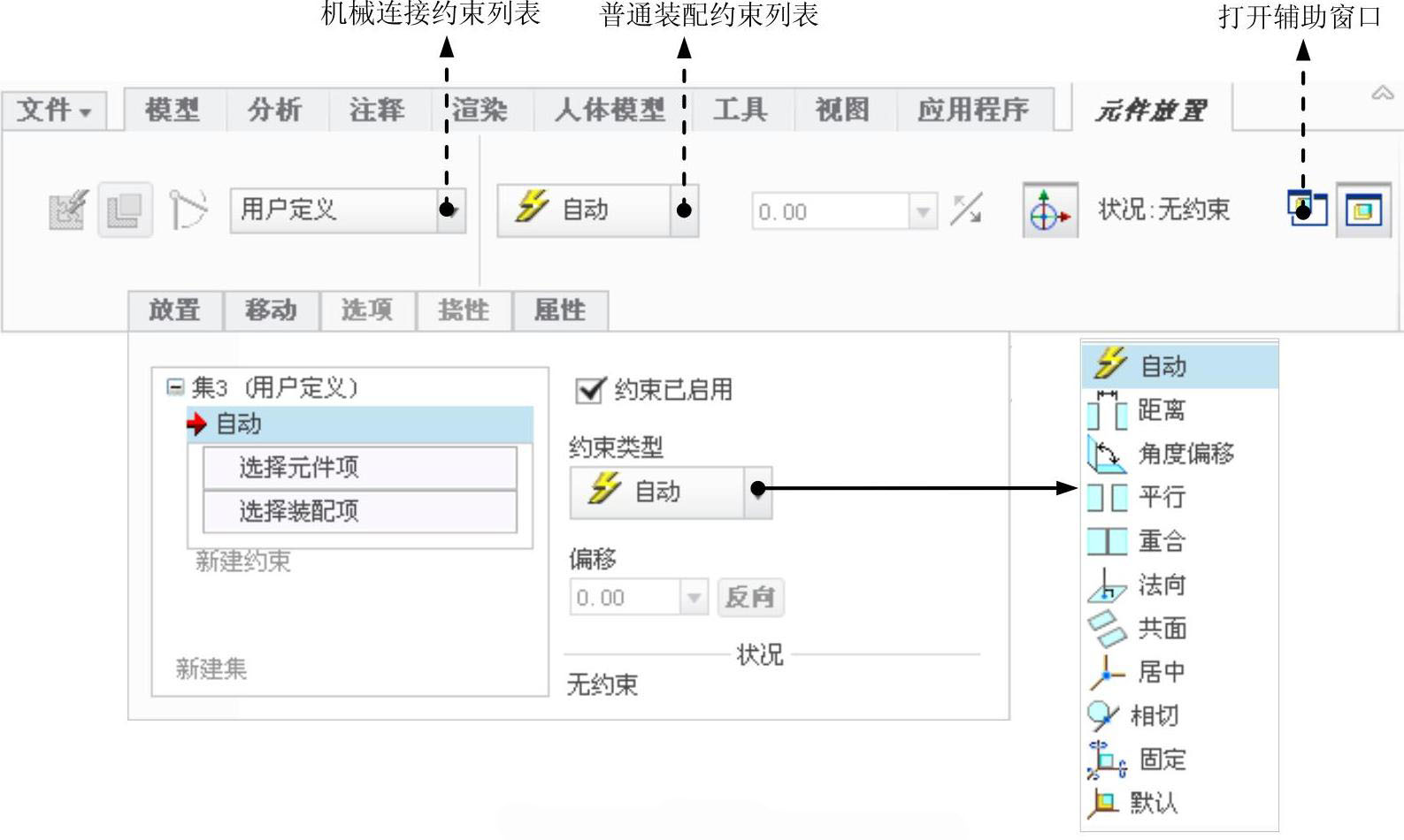
图2.3.8 “元件放置”操控板
说明:
●由于基座零件在机构中是一个固定的主体,所以这里添加 约束(零件坐标系与装配坐标系重合)使其固定即可。
约束(零件坐标系与装配坐标系重合)使其固定即可。
●Step2中的 约束也可以直接在图2.3.8所示的普通装配约束列表中直接选取。
约束也可以直接在图2.3.8所示的普通装配约束列表中直接选取。
●在默认情况下, 区域显示的是普通装配约束列表,如果在机械连接约束列表中选择一种连接,
区域显示的是普通装配约束列表,如果在机械连接约束列表中选择一种连接, 区域的显示将会发生变化。
区域的显示将会发生变化。
Stage3.添加第一个运动元件:连杆1(rod_1)
Step1.引入连杆1。单击 功能选项卡
功能选项卡 区域中的“组装”按钮
区域中的“组装”按钮 ,打开名为rod_1.prt的零件,此时出现“元件放置”操控板。
,打开名为rod_1.prt的零件,此时出现“元件放置”操控板。
说明:第二个零件引入后,可能与第一个零件相距较远,或者其方向和方位不便于进行约束放置,此时需要将零件移动到合适的位置以便添加约束。
Step2.移动连杆1至合适位置。
(1)在元件放置操控板中单击 按钮,系统弹出图2.3.9所示的“移动”界面。
按钮,系统弹出图2.3.9所示的“移动”界面。
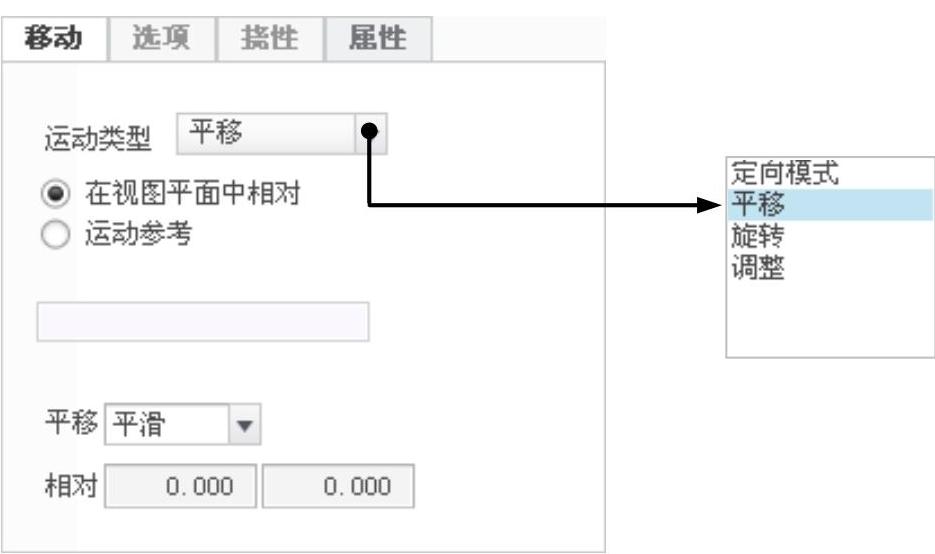
图2.3.9 “移动”界面
(2)在 下拉列表中选择
下拉列表中选择 选项。
选项。
(3)选取运动参考。在“移动”界面中选中 单选项(在视图平面中移动元件)。
单选项(在视图平面中移动元件)。
(4)在绘图区单击左键,并移动鼠标,可看到连杆1随着鼠标的移动而平移,将其从图2.3.10中的位置1平移到图2.3.11中的位置2后再次单击左键。
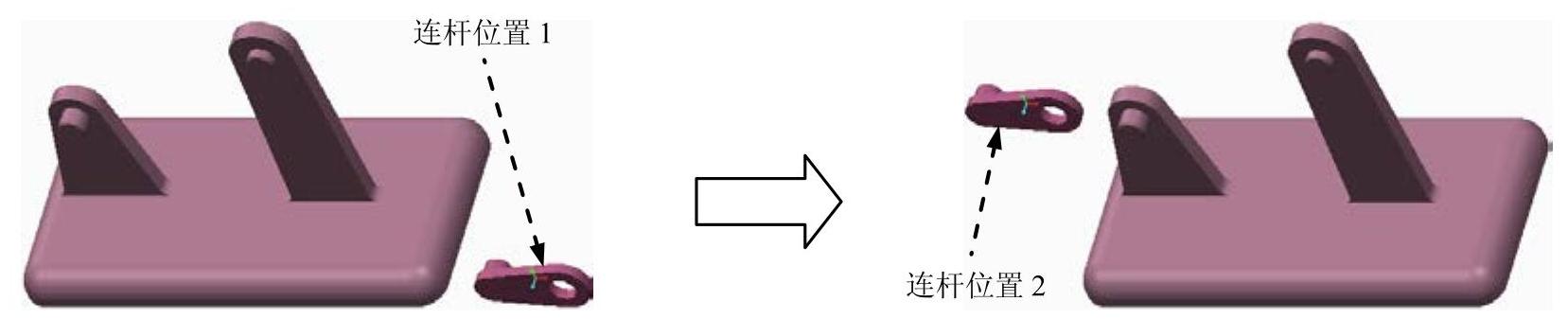
图2.3.10 位置1 图2.3.11 位置2
说明:
●在“移动”界面的 下拉列表中选择
下拉列表中选择 选项,可以旋转模型。
选项,可以旋转模型。
●在“元件放置”操控板中单击 按钮,显示拖动轴系,拖动轴系中的轴或平面可以移动、旋转模型。(https://www.daowen.com)
按钮,显示拖动轴系,拖动轴系中的轴或平面可以移动、旋转模型。(https://www.daowen.com)
●放置元件时,在不打开 界面的前提下,可以使用快捷键平移和旋转要装配的元件,具体方法是:先同时按住Ctrl键和Shift键,按住鼠标右键并拖动鼠标可以平移模型,按住鼠标左键键并拖动鼠标可以在视图平面内旋转模型,按住鼠标中键并拖动鼠标可以全方位旋转模型。
界面的前提下,可以使用快捷键平移和旋转要装配的元件,具体方法是:先同时按住Ctrl键和Shift键,按住鼠标右键并拖动鼠标可以平移模型,按住鼠标左键键并拖动鼠标可以在视图平面内旋转模型,按住鼠标中键并拖动鼠标可以全方位旋转模型。
●在元件放置操控板中,单击 按钮即可打开一个包含要装配元件的辅助窗口(再次单击
按钮即可打开一个包含要装配元件的辅助窗口(再次单击 按钮即可关闭辅助窗口),如图2.3.12所示。在此窗口中可单独对要装入的元件进行缩放、旋转和平移,这样就可以将要装配的元件调整到方便选取装配约束参考的位置,也可以直接在辅助窗口中选取约束参考。
按钮即可关闭辅助窗口),如图2.3.12所示。在此窗口中可单独对要装入的元件进行缩放、旋转和平移,这样就可以将要装配的元件调整到方便选取装配约束参考的位置,也可以直接在辅助窗口中选取约束参考。
图2.3.12 辅助窗口
(5)调整连杆1的位置,将连杆1旋转到图2.3.13所示的方位。
图2.3.13 旋转连杆1
Step3.创建连杆1和基座之间的“销(Pin)”连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项,如图2.3.14所示。
选项,如图2.3.14所示。

图2.3.14 “元件放置”操控板
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图2.3.15中的两条轴线(连杆1中孔的中心轴线和基座左侧安装轴的中心轴线)为
按钮,分别选取图2.3.15中的两条轴线(连杆1中孔的中心轴线和基座左侧安装轴的中心轴线)为 约束参考,此时
约束参考,此时 界面如图2.3.16所示。
界面如图2.3.16所示。
(3)定义“平移”约束。分别选取图2.3.15中的两个平面为 约束的参考,以限制连杆在安装轴上平移自由度,此时
约束的参考,以限制连杆在安装轴上平移自由度,此时 界面如图2.3.17所示。
界面如图2.3.17所示。
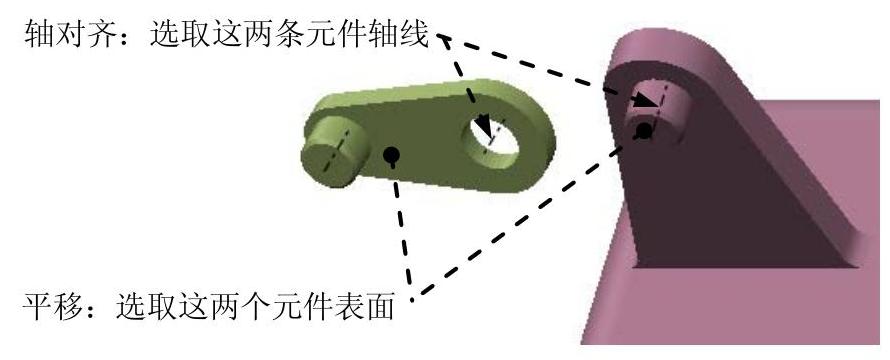
图2.3.15 创建“销(Pin)”连接
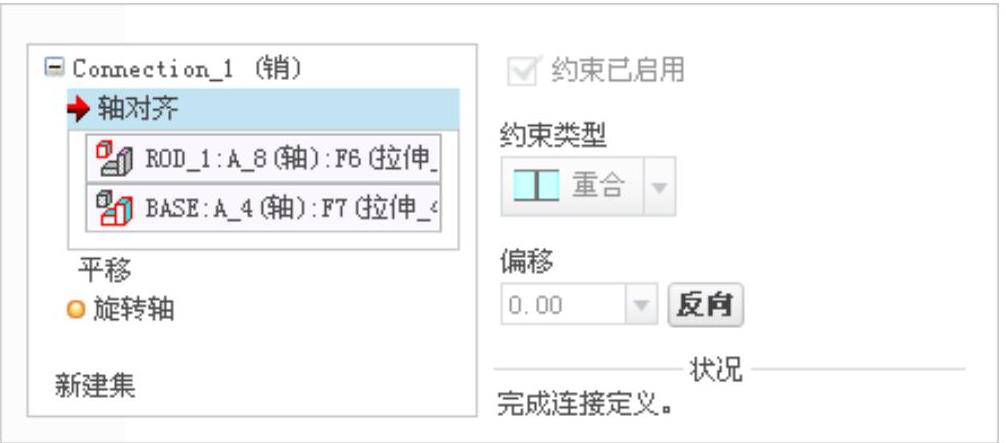
图2.3.16 “放置”界面
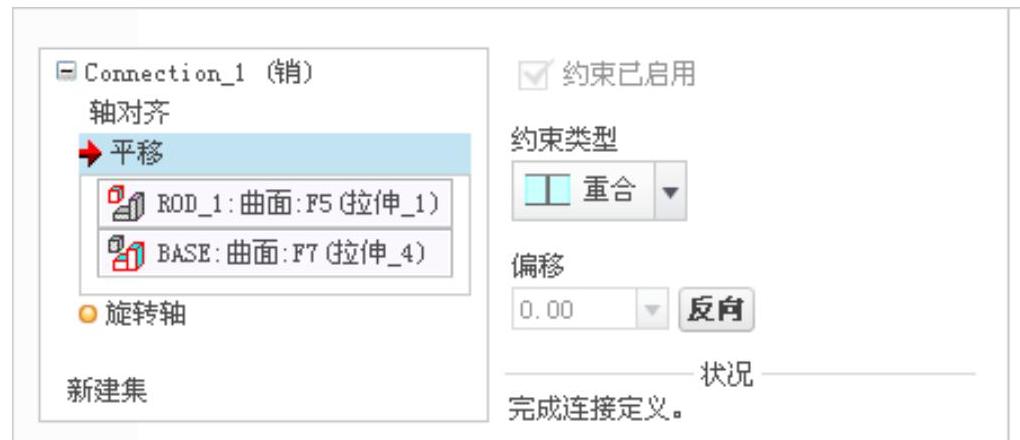
图2.3.17 “放置”界面
说明:
●如果约束参考选择错误,可以先单击操控板中的 或
或 ,在下方的约束参考文本框中单击要替换的对象,重新选取即可。也可以右击要修改的对象,选择“移除”命令将其移除。
,在下方的约束参考文本框中单击要替换的对象,重新选取即可。也可以右击要修改的对象,选择“移除”命令将其移除。
●单击界面中的“Connection_1(销)”,可以修改连接的名称,反转连接方向以及更改连接类型,如图2.3.18所示。
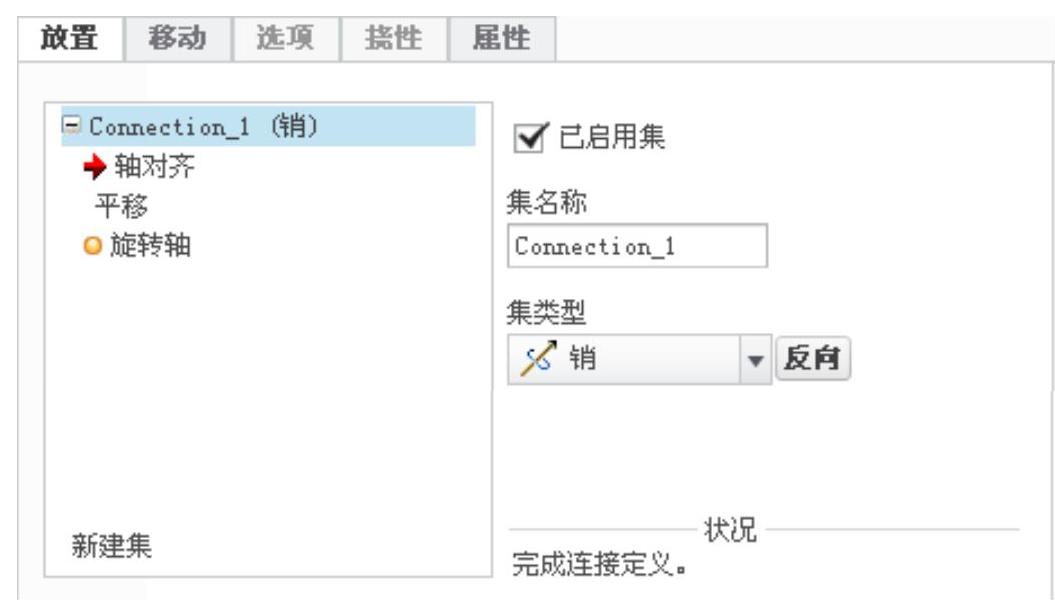
图2.3.18 “放置”界面
Step4.单击操控板中的 按钮,完成“销(Pin)”连接的创建与连杆1的放置,如图2.3.19所示。
按钮,完成“销(Pin)”连接的创建与连杆1的放置,如图2.3.19所示。
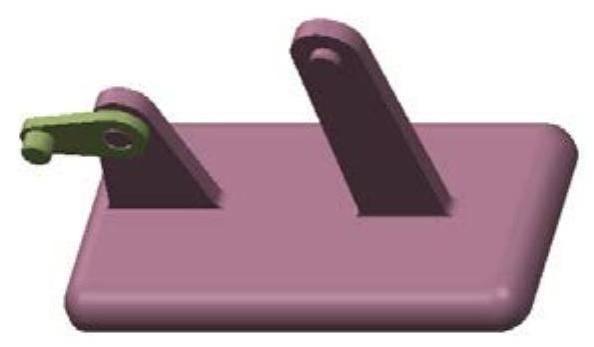
图2.3.19 完成连杆1的放置
Stage4.添加第二个运动元件:连杆2(rod_2)
Step1.引入连杆2。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开名为rod_2.prt的零件,此时出现“元件放置”操控板。
,打开名为rod_2.prt的零件,此时出现“元件放置”操控板。
Step2.移动连杆2至合适位置。将其从图2.3.20中的位置1平移到图2.3.21中的位置2后再次单击左键。

图2.3.20 位置1 图2.3.21 位置2
Step3.创建连杆2和基座之间的“销(Pin)”连接。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图2.3.22中的两条轴线(连杆2中孔的中心轴线和基座右侧安装轴的中心轴线)为
按钮,分别选取图2.3.22中的两条轴线(连杆2中孔的中心轴线和基座右侧安装轴的中心轴线)为 约束参考,此时
约束参考,此时 界面如图2.3.23所示。
界面如图2.3.23所示。
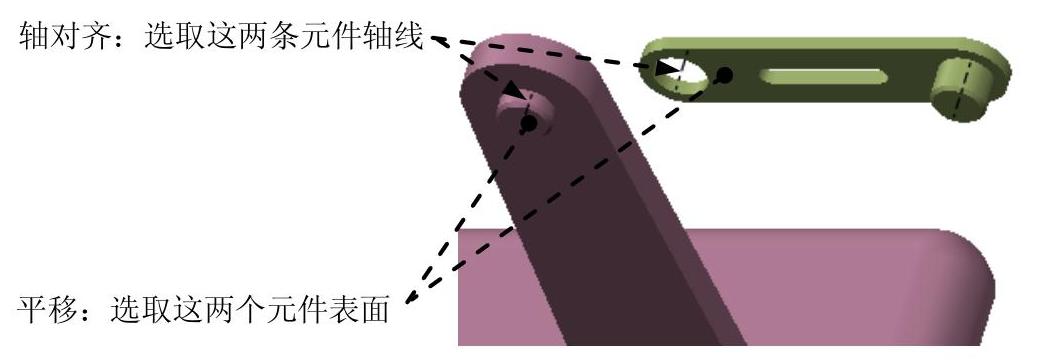
图2.3.22 创建“销(Pin)”连接
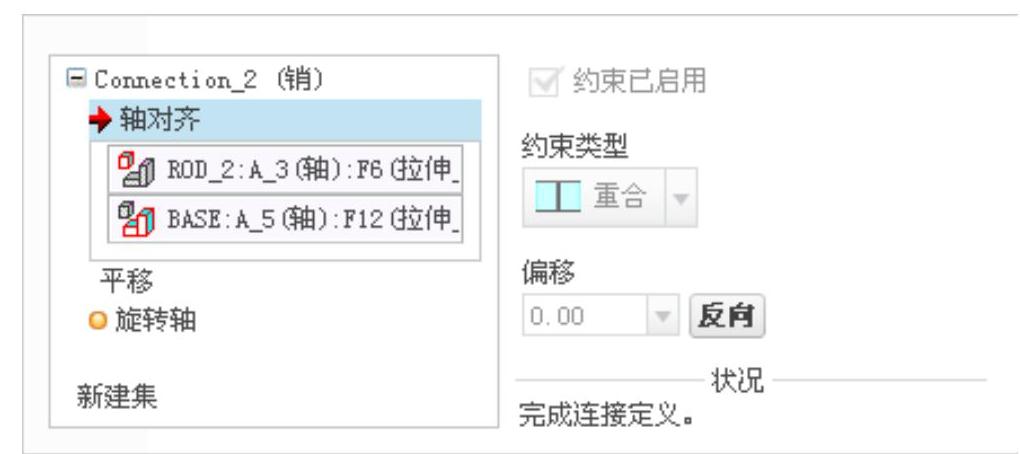
图2.3.23 “放置”界面
(3)定义“平移”约束。分别选取图2.3.22中的两个平面为 约束的参考,以限制连杆在安装轴上平移自由度,此时
约束的参考,以限制连杆在安装轴上平移自由度,此时 界面如图2。3.24所示。
界面如图2。3.24所示。
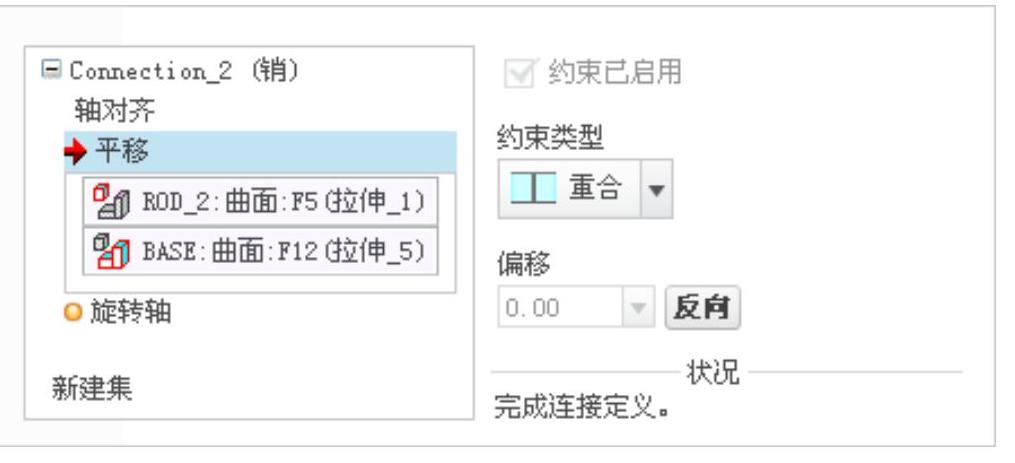
图2.3.24 “放置”界面
Step4.单击操控板中的 按钮,完成“销(Pin)”连接的创建与连杆2的放置,如图2.3.25所示。
按钮,完成“销(Pin)”连接的创建与连杆2的放置,如图2.3.25所示。
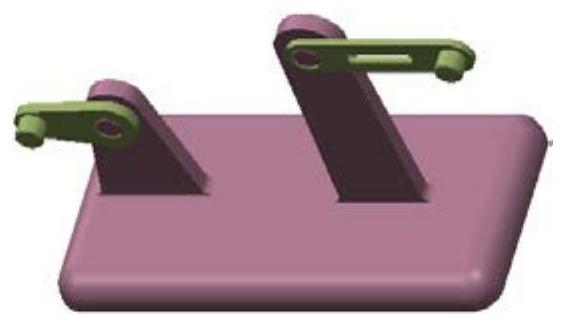
图2.3.25 完成连杆2的放置
Stage5.添加第三个运动元件:连杆3(rod_3)
Step1.引入连杆3。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开名为rod_3.prt的零件。
,打开名为rod_3.prt的零件。
Step2.移动连杆2至合适位置。将其从图2.3.26中的位置1平移到图2.3.27中的位置2后再次单击左键。
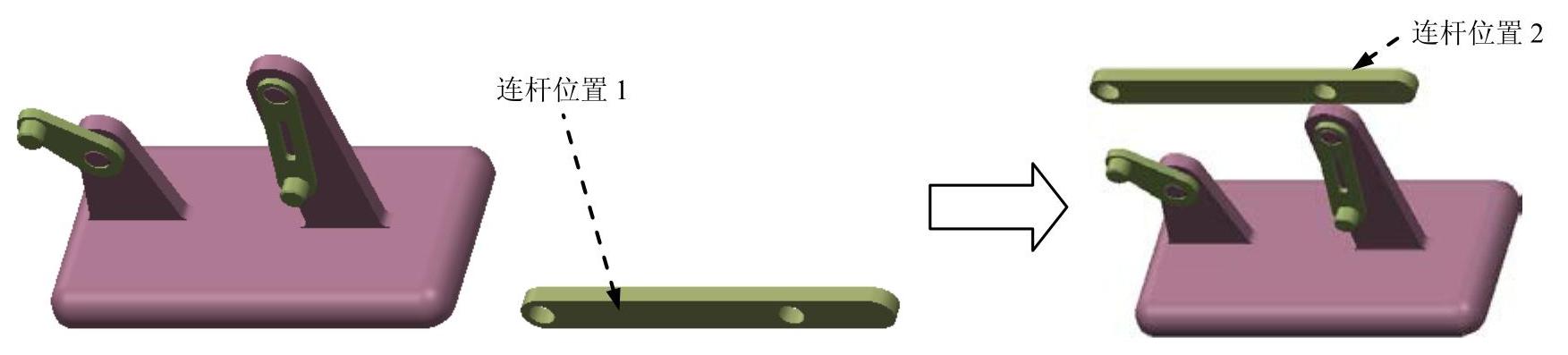
图2.3.26 位置1 图2.3.27 位置2
Step3.创建连杆3和连杆1之间的“销(Pin)”连接1。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)单击 按钮,选取图2.3.28中的两条轴线为
按钮,选取图2.3.28中的两条轴线为 约束参考,此时
约束参考,此时 界面如图2.3.29所示。
界面如图2.3.29所示。
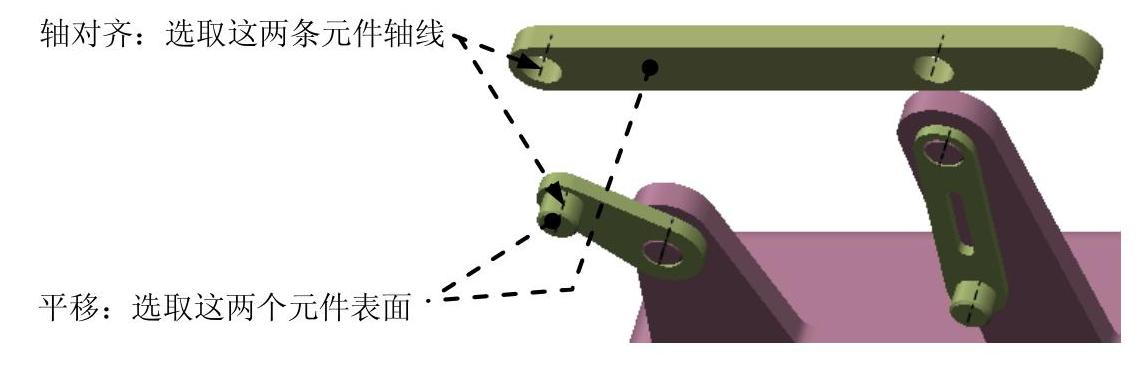
图2.3.28 创建“销(Pin)”连接1
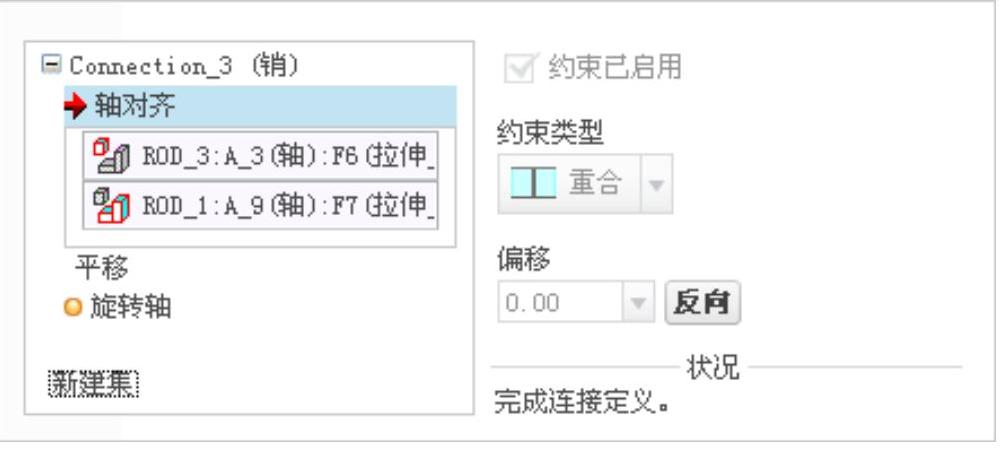
图2.3.29 “放置”界面
(3)选取图2.3.28中的两个平面为 约束的参考,此时
约束的参考,此时 界面如图2.3.30所示。
界面如图2.3.30所示。
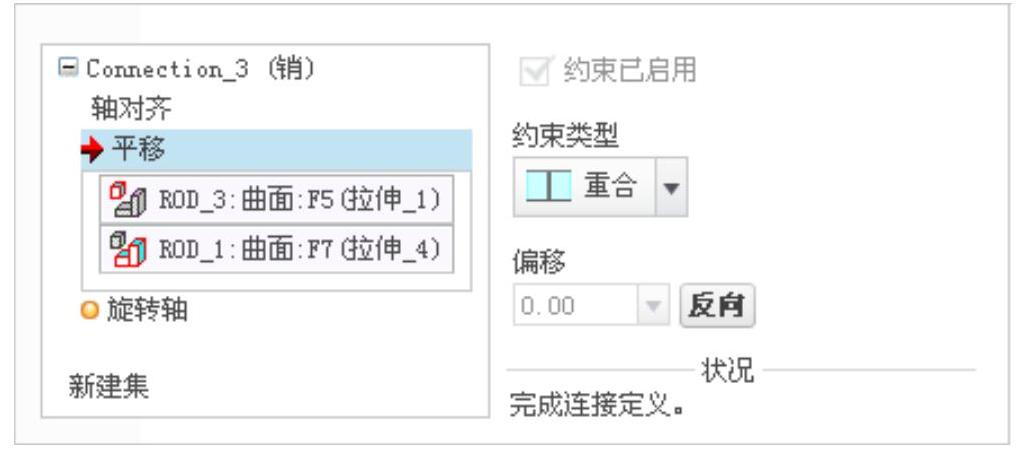
图2.3.30 “放置”界面
Step4.创建连杆3和连杆2之间的“销(Pin)”连接2。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)选取图2.3.31中的两条轴线为 约束参考,此时
约束参考,此时 界面如图2.3.32所示。
界面如图2.3.32所示。
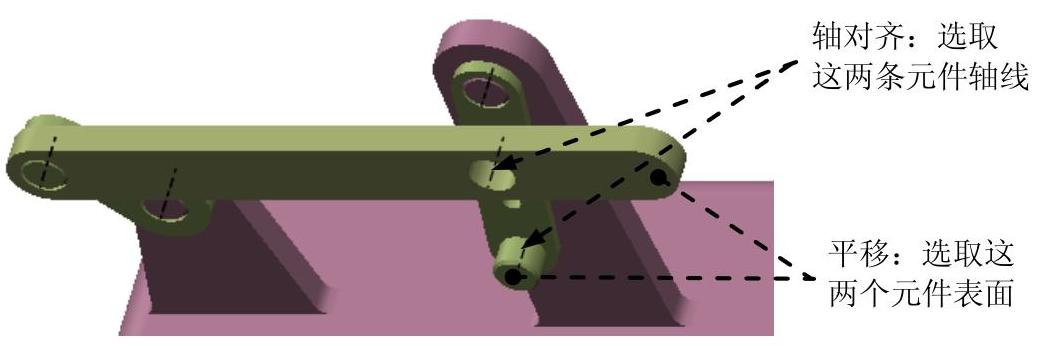
图2.3.31 创建“销(Pin)”连接2
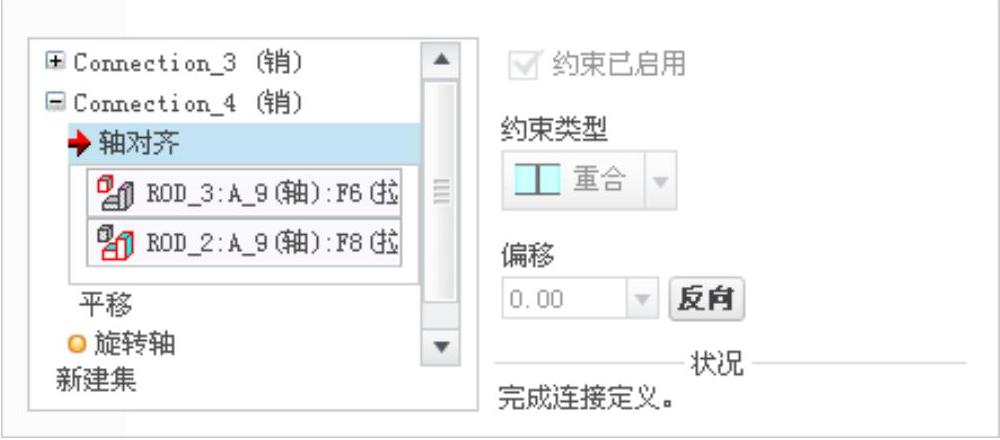
图2.3.32 “放置”界面
(3)选取图2.3.31中的两个平面为 约束的参考,此时
约束的参考,此时 界面如图2.3.33所示。
界面如图2.3.33所示。
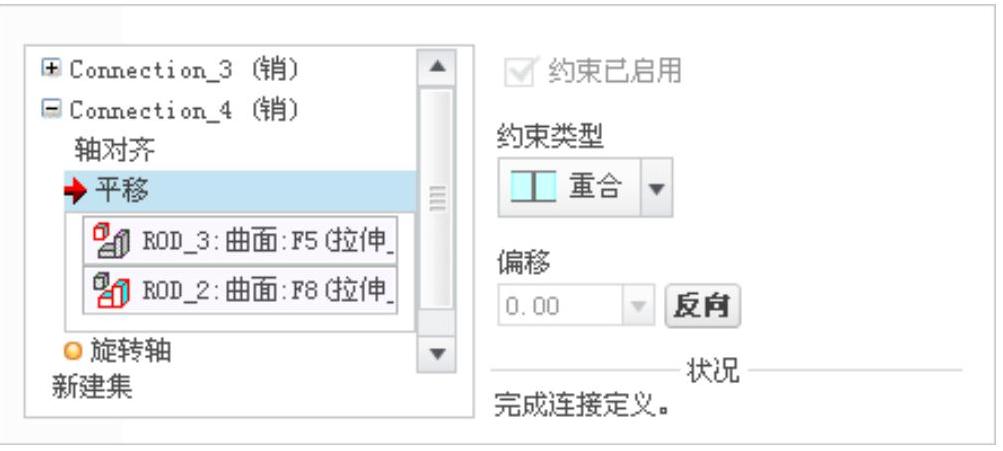
图2.3.33 “放置”界面
Step5.单击操控板中的 按钮,完成“销(Pin)”连接的创建与连杆3的放置,如图2.3.34所示。
按钮,完成“销(Pin)”连接的创建与连杆3的放置,如图2.3.34所示。
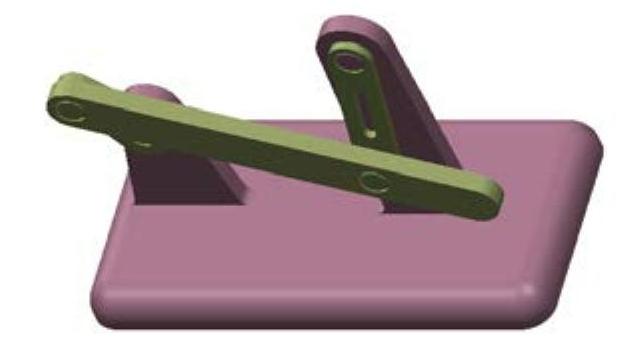
图2.3.34 完成连杆3的放置
Stage6.验证机构连接
Step1.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生模型。
,再生模型。
Step2.拖动机构。按住Ctrl键和Shift键,拖动连杆1,可以观察机构的连接状况。
Step3.再次再生模型,然后保存机构模型。
说明:采用快捷键拖动机构中的运动元件,可以快速检查机构的装配和运行情况,如果机构不能拖动或拖动时机构发生异常的位置移动,则需要检查机构的连接是否设置正确。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





