1.功能
通常情况下,一般使用直角坐标系(X、Y、Z),但工件上的点也可以用极坐标定义。如果一个工件或一个部件,当其尺寸以到一个固定点(极点)的半径和角度来设定时,往往就使用极坐标系。
极坐标同样以所使用的平面G17~G19为基准平面,也可以设定垂直于该平面的第3根轴的坐标值,此时可作为柱面坐标系的三维坐标尺寸。
2.指令格式及含义
(1)定义极坐标
1)在直角坐标系中定义极点:G110/G111/G112 X_Y_Z_;
2)在极坐标系中定义极点:G110/G111/G112 AP=_RP=_;
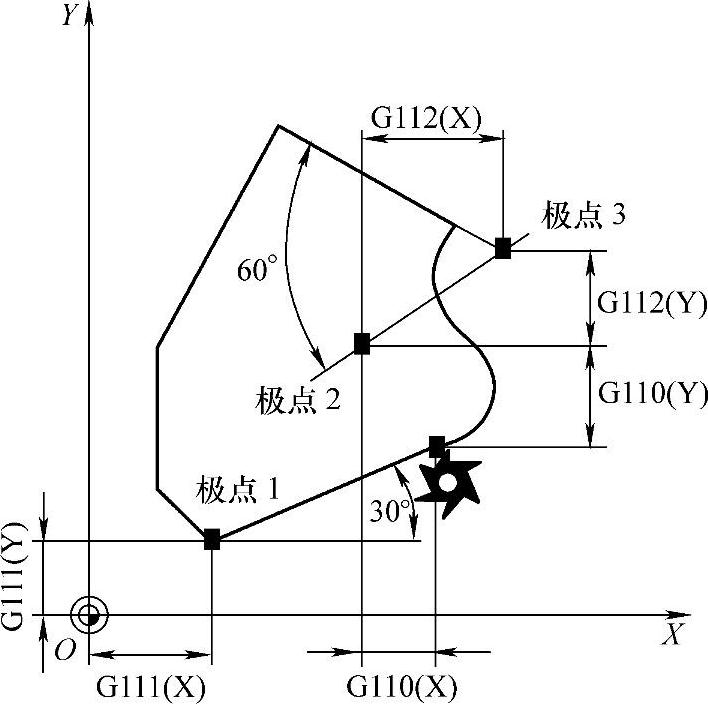
用G110/G111/G112定义极点的情况如图5-31所示。
用G111定义极点1,用G110定义极点2,用G112定义极点3。
(2)极坐标系中位移指令的指令格式
极坐标系里的快速移动指令:
G0 AP=_ RP=_;
极坐标系里的直线插补指令:
G1 AP=_ RP=_;
极坐标系里的顺圆插补指令:
G2 AP=_ RP=_;
极坐标系里的逆圆插补指令:
G3 AP=_ RP=_;
新的终点定义在相关的极坐标系内。
 (https://www.daowen.com)
(https://www.daowen.com)
图5-31 用G110/G111/G112定义极点的情况
(3)指令解释
1)G110:极坐标参数,相对于刀具最近到达的位置点定义极点。
2)G111:极坐标参数,相对于当前工件坐标系的原点定义极点。
3)G112:极坐标参数,相对于上一个有效极点定义极点。
4)AP=_:极角,极点和目标点之间连线与角度参考方向线之间的夹角,数值范围±(0°~360°)。当用绝对坐标编程时,角度为相对于加工平面的水平轴方向,例如,G17平面内是相对于X轴,正的旋转方向为逆时针方向;当用相对坐标编程时AP=IC(),上一个被编程的角度作为参考位置。极角一直保持到新的极角被定义或工件坐标系被改变。
5)RP=_:极半径,极点和目标点之间的距离。单位为mm或in,RP一直保持到新的极半径被定义。
3.说明
1)当一个极点已经存在时,极点也可以用极坐标定义。
2)如果没有定义极点,则当前工件坐标系的零点就作为极点使用。
3)所有与极坐标有关的输入必须在单个程序段内编程。如果没有极坐标在使用,可用工件坐标系原点定义极点。
4.编程举例
【例5-19】 用极坐标系指令编程,零件如图5-32所示。
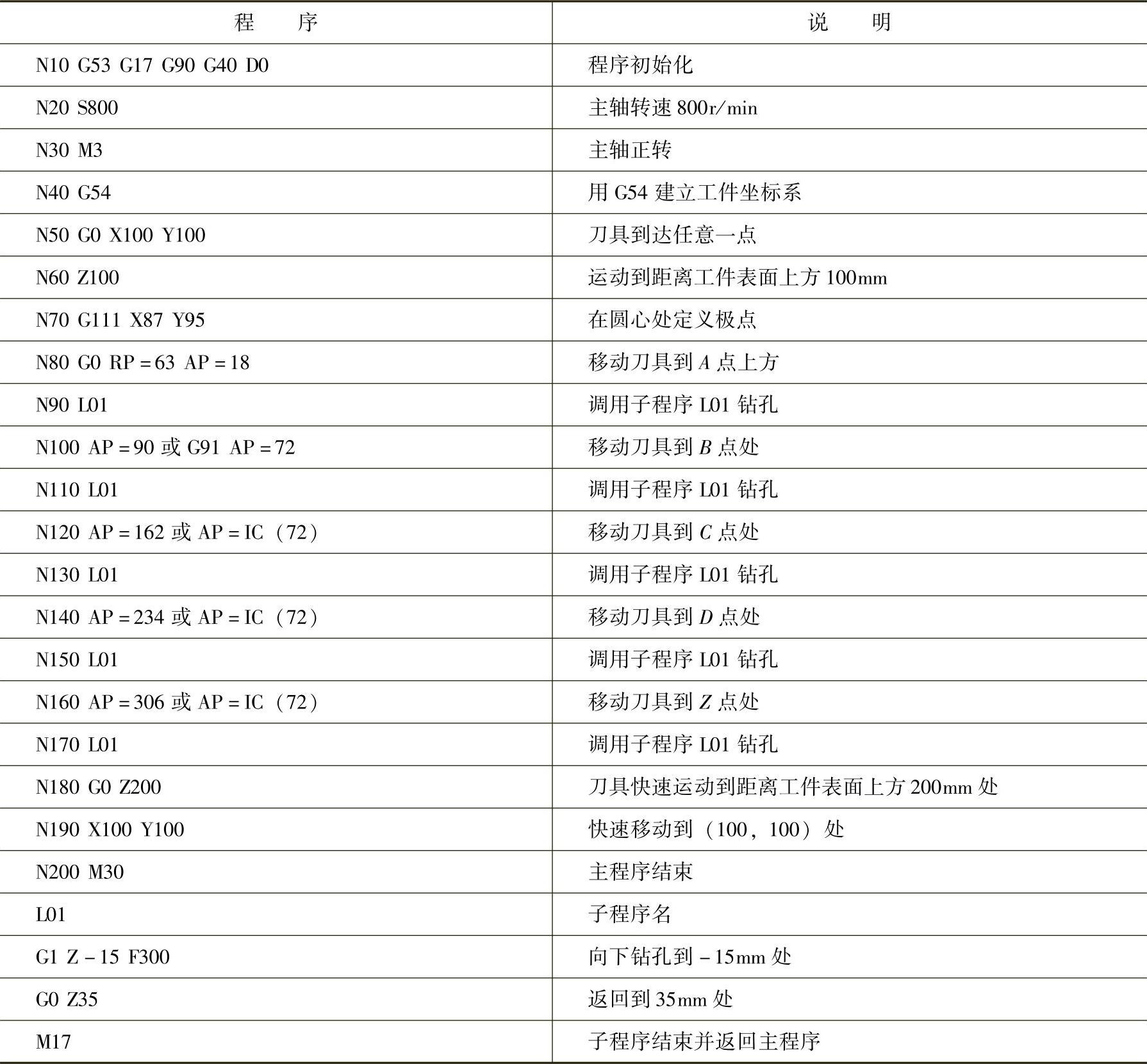
加工程序及其说明见表5-19。
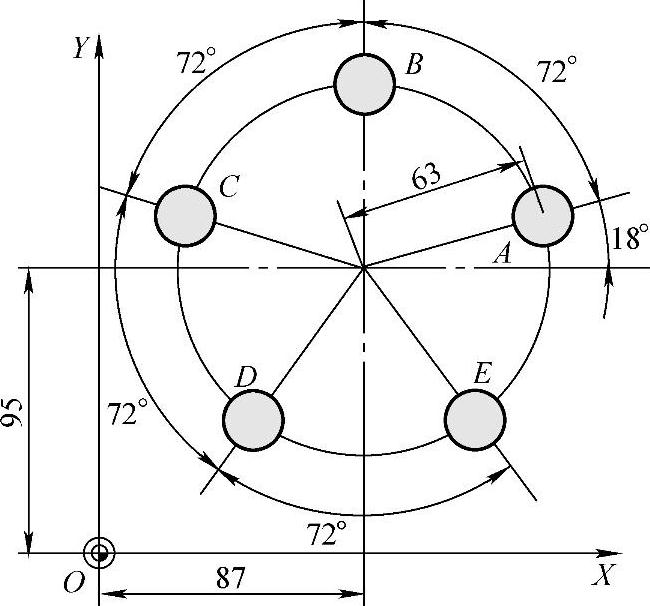
图5-32 用极坐标系指令编程实例
表5-19 用极坐标系指令编程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







