学习任务1 行星齿轮变速器的认识
【学习目标】
1. 知识目标
(1) 行星齿轮机构的作用、组成和工作过程。
(2) 单排行星齿轮机构的变速原理。
(3) 常见的行星齿轮机构分类及特点。
2. 技能目标
能够运用本学习任务的知识,进一步理解后续的学习任务。
【相关知识】
液力变矩器可以在一定范围内自动无级地改变转矩和传动比,以适应行驶阻力的变化。但由于变矩比小,不能完全满足汽车行驶的要求,因此必须与机械变速器相配合使用,扩大传动比的变化范围,才能满足汽车行驶的要求。
自动变速器的机械变速器主要有行星齿轮变速器和非行星齿轮变速器,非行星齿轮变速器也称为平行轴齿轮变速器或定轴轮系变速器。目前以行星齿轮变速器多见,非行星齿轮变速器目前仅用于本田车系的自动变速器。行星齿轮变速器由多排行星齿轮机构和换挡执行元件组成。多排行星齿轮机构包括辛普森式行星齿轮机构、拉威诺式行星齿轮机构和串联式行星齿轮机构。换挡执行元件包括离合器、制动器和单向离合器。
一、 定轴轮系(非行星齿轮机构)
1. 二轴定轴轮系
定轴轮系最简单的是二轴定轴轮系,如图3-1-1所示。两个外啮合齿轮互相啮合时,它们以相反的方向旋转,如图3-1-1 (a)所示。一个外齿轮和一个内齿轮相互啮合时,它们以相同的方向旋转,如图3-1-1 (b)所示。
(a)外啮合(b)内啮合
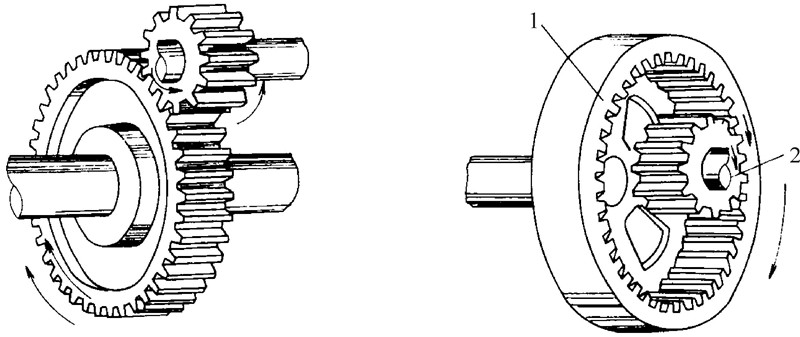
图3-1-1二轴定轴轮系
1—内齿轮;2—外齿轮
传动比是指主动齿轮转速与从动齿轮转速之比,也等于从动轮齿数与主动轮齿数之比,一般用i来表示,即
i=n主/n从=z从/z主
如图3-1-2所示,如果主动轮齿数为12,从动轮齿数为24,则传动比为2∶1,即主动轮转1圈,从动轮转1/2圈。如果两个齿轮的齿数相等,则传动比为1,即主、从动轮以相同的转速旋转。
齿轮不仅可以改变转速,还可以改变转矩。假定主动齿轮转速和转矩为n1和T1,从动齿轮转速和转矩为n2和T2,则T1∶n1=T2∶n2,T2=iT1,说明可以通过降速来增矩。
2. 三轴定轴轮系
三轴定轴轮系如图3-1-3所示,由输入轴、输出轴和中间轴及其齿轮组成。中间轴齿轮相当于惰轮,只改变传动的旋转方向而不改变转矩。当输入轴顺时针转动,中间轴逆时针转动,而输出轴顺时针转动,即输入与输出的转向相同;假定输入轴齿轮的转速、转矩和齿数分别为n1、T1和z1,输出轴齿轮的转速、转矩和齿数分别为n3、T3和z3,中间轴齿轮的转速、转矩和齿数分别为n2、T2和z2,则
i=n1/ n3=i12i23=(z2/z1)(z3/z2)=z3/z1
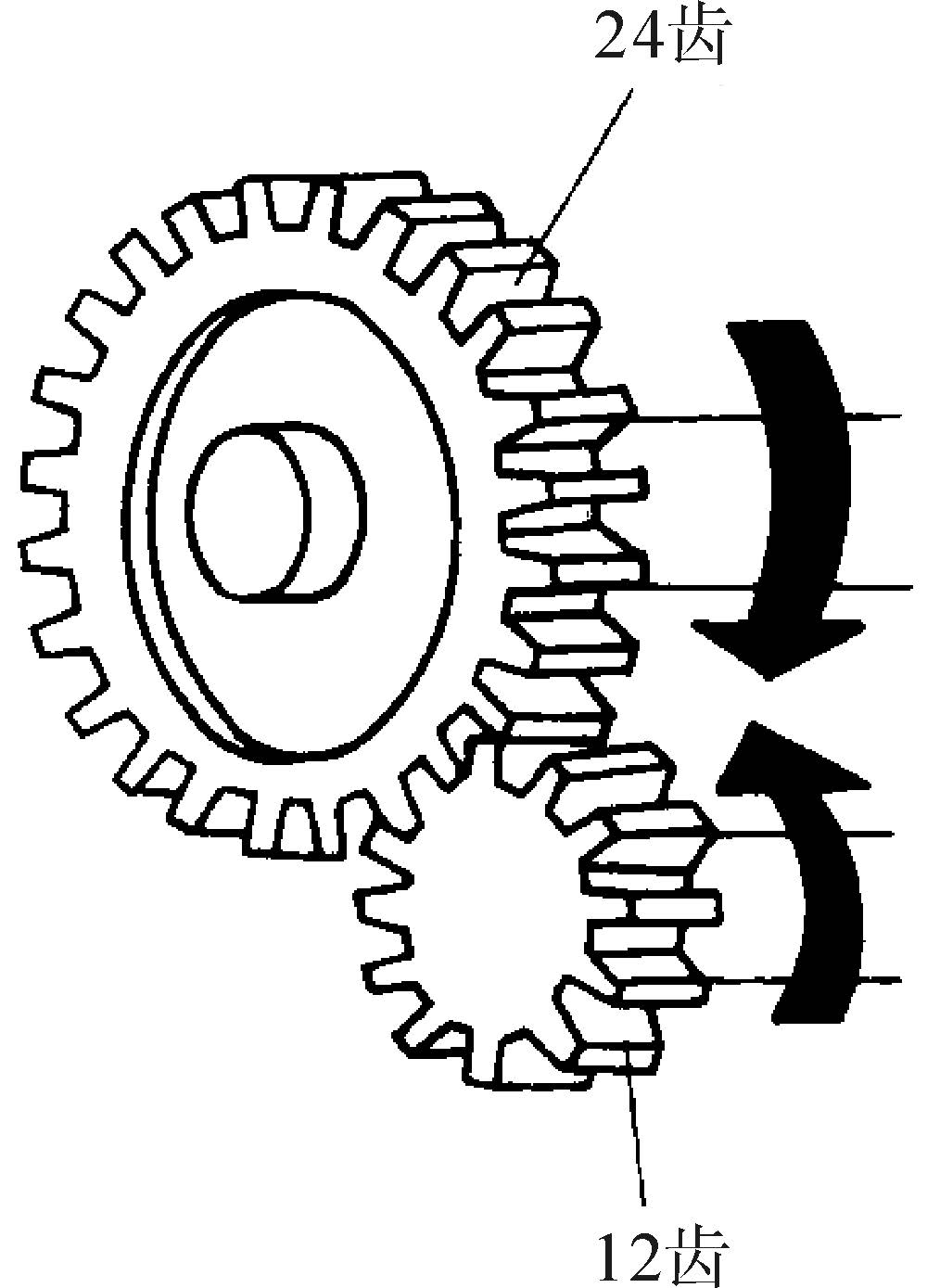
图3-1-2齿轮传动比

图3-1-3三轴定轴轮系
1—输入轴齿轮;2—中间轴齿轮;3—输出轴齿轮
二、 单排行星齿轮机构
1. 组成
如图3-1-4所示,单排行星齿轮机构的基本组成包括1个太阳轮(或称为中心轮)、1个齿圈、1个行星架和支承在行星架上的3~4个行星轮。
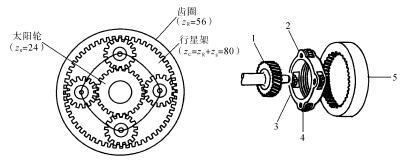
图3-1-4单排行星齿轮机构的基本组成
1—太阳轮;2—行星轮轴;3—行星架;4—行星轮;5—齿圈
齿圈又称为齿环,制有内齿,其余齿轮均为外齿轮。太阳轮位于机构的中心,行星轮与之外啮合,行星轮与齿圈内啮合。通常行星轮有3~4个,通过滚针轴承安装在行星齿轮轴上,行星齿轮轴对称、均匀地安装在行星架上。行星齿轮机构工作时,行星轮除了绕自身轴线的自转外,还绕着太阳轮公转,行星轮绕太阳轮公转,行星架也绕太阳轮旋转。由于太阳轮与行星轮是外啮合,所以二者的旋转方向是相反的;而行星轮与齿圈是内啮合,则这二者的旋转方向是相同的。
2. 类型
单排行星齿轮机构有单行星齿轮式和双行星齿轮式两种类型。
单行星齿轮机构的结构和简图如图3-1-5所示,双行星齿轮机构的结构和简图如图3-1-6所示。双行星齿轮机构在太阳轮和齿圈之间有两组互相啮合的行星轮,其中外行星轮与齿圈啮合,内行星轮与太阳轮啮合。它与单行星齿轮机构相比,在其他条件相同的情况下,齿圈可以得到反向传动。
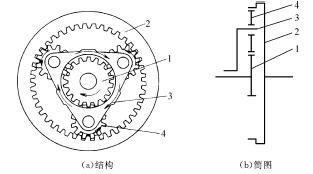
图3-1-5单行星齿轮机构的结构和简图
1—太阳轮;2—齿圈;3—行星架;4—行星轮
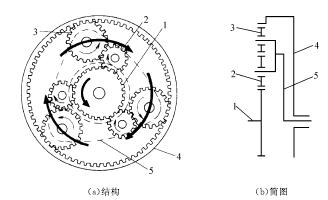
图3-1-6双行星齿轮机构的结构和简图
1—太阳轮;2—内行星轮;3—外行星轮;4—齿圈行星轮;5—行星架
3. 运动规律
多排行星齿轮机构由单排行星齿轮机构组合而成,了解单排行星齿轮机构的运动规律有助于更好地理解多排行星齿轮机构的工作原理。下面介绍单排行星齿轮机构的运动规律。(https://www.daowen.com)
根据能量守恒定律,由作用在单排行星齿轮机构各元件上的力矩和结构参数,可以得出表示单排行星齿轮机构运动规律的特性方程式
n1+αn2-(1+α)n3=0
式中:n1——太阳轮转速;
n2——齿圈转速;
n3——行星架转速;
α——齿圈齿数z2与太阳轮齿数z1之比,即α=z2/z1,且α>1。
由于一个方程有三个变量,如果将太阳轮、齿圈和行星架中某个元件作为主动(输入)部分,让另一个元件作为从动(输出)部分,则由于第三个元件不受任何约束和限制,所以从动部分的运动是不确定的。因此为了得到确定的运动,必须对太阳轮、齿圈和行星架三者中的某个元件的运动进行约束和限制。
4. 动力传动方式
如图3-1-7所示,通过对单排行星齿轮机构不同的元件进行约束和限制,可以得到不同的动力传动方式。
(1) 齿圈为主动件(输入),行星架为从动件(输出),太阳轮固定,如图3-1-7 (a)所示。此时,n1=0,则传动比i23为
i23=n2/n3=1+1/α>1
由于传动比大于1,说明为减速传动,可以作为降速挡。
(2) 太阳轮为主动件(输入),行星架为从动件(输出),齿圈固定,如图3-1-7 (c)所示。此时,n2=0,则传动比i13为
i13=n1/n3=1+α>1
由于传动比大于1,说明为减速传动,可以作为降速挡。
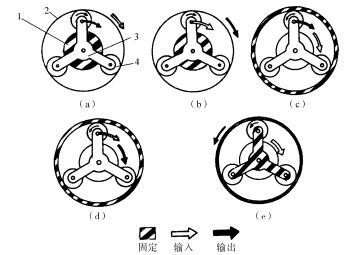
图3-1-7单排行星齿轮机构的动力传动方式
对比这两种情况的传动比,由于i13>i23,虽然都为降速挡,但i13是降速挡中的低挡,而i23为降速挡中的高挡。
(3) 行星架为主动件(输入),齿圈为从动件(输出),太阳轮固定,如图3-1-7 (b)所示。此时,n1=0,则传动比i32为
i32=n3/n2=α/(1+α)<1
由于传动比小于1,说明为增速传动,可以作为超速挡。
(4) 行星架为主动件(输入),太阳轮为从动件(输出),齿圈固定,如图3-1-7 (d)所示。此时,n2=0,则传动比i31为
i31=n3/n1=1/(1+α)<1
由于传动比小于1,说明为增速传动,可以作为超速挡。
(5) 太阳轮为主动件(输入),齿圈为从动件(输出),行星架固定,如图3-1-7 (e)所示。
此时,n3=0,则传动比i12为
i12=n1/n2=-α
由于传动比为负值,说明主从动件的旋转方向相反;又由于|i12|>1,说明为增速传动,可以作为倒挡。
(6) 如果n1=n2,则可以得到n3=n1=n2。同样,n1=n3或n2=n3时,均可以得到n1=n2=n3的结论。因此,若使太阳轮、齿圈和行星架三个元件中的任何两个元件连为一体转动,则另一个元件的转速必然与前二者等速同向转动。即行星齿轮机构中所有元件(包含行星轮)之间均无相对运动,传动比i=1。这种传动方式用于变速器的直接挡传动。
(7) 如果太阳轮、齿圈和行星架三个元件没有任何约束,则各元件的运动是不确定的,此时为空挡。
自动变速器中的行星齿轮变速器一般是采用2~3排行星齿轮机构传动,其各挡传动比就是根据上述单排行星齿轮机构传动特点进行合理组合得到的。
三、 常见多排行星齿轮机构
为了提供更多的挡位,提高车辆适应性,自动变速器中常采用多排行星齿轮机构配合工作。常见的双排行星齿轮机构的结构方式主要有以下几种。
1. 辛普森(Simpson)式多排行星齿轮机构
辛普森式多排行星齿轮机构如图3-1-8所示。
这是以发明者工程师Simpson命名的齿轮结构。因其结构简单,加工工艺性好,传动功率大,易于换挡操纵,故从50多年前发明迄今,一直被许多汽车厂家广泛采用。
结构特点:双排行星齿轮共用一个太阳轮,有两组行星齿轮、两个齿圈、两个行星架。
2. 拉威诺(Ravigneaux)式多排行星齿轮机构
拉威诺式多排行星齿轮机构如图3-1-9所示。
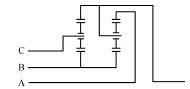
图3-1-8辛普森式多排行星齿轮机构
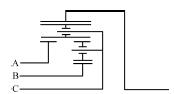
图3-1-9拉威诺式多排行星齿轮机构
结构特点:有两个太阳轮,两排行星齿轮共用一个齿圈。采用一大一小两个太阳轮、三个长行星齿轮和三个短行星齿轮组成两组行星齿轮,所有的行星齿轮轴都固定于共用的行星齿轮架上。
图3-1-10串联式多排行星齿轮机构
拉威诺式齿轮结构啮合的齿数多,工作平稳,可以传递较大的扭矩,但结构复杂,工作原理难理解。
3. 串联式(CR-CR)多排行星齿轮机构
串联式多排行星齿轮机构如图3-1-10所示。
结构特点:两套独立的行星齿轮机构相互串联,两个太阳轮独立运动,后齿圈与前行星架相连,前齿圈与后行星架相连。
【复习题】
(1) 简述单排行星齿轮机构如何得到低挡、高挡、直接挡、倒挡和空挡。
(2) 简述辛普森式行星齿轮机构、拉威诺式行星齿轮机构和串联式行星齿轮机构的特点。