滑模控制在电机控制中的应用包括控制器和观测器两方面,其中滑模观测器在第3章已经进行了介绍,本章主要研究滑模控制器。滑模控制具有一系列优点,如对参数变化具有鲁棒性、抗外部干扰能力强、滑模面上系统降阶、结构简单、容易实现等,在电机控制中已经得到了广泛关注和研究[7-12]。在异步电机矢量控制中,通常把滑模用于电流内环控制[12]或外部速度控制[9],没有充分利用滑模控制的优点,本节在深入研究滑模控制的基础上,提出了一种全滑模控制系统[10],即把直接矢量控制的四个控制器全部采用滑模控制器,提高了系统的动静态性能和鲁棒性。下面对各个环节的控制器设计进行介绍。
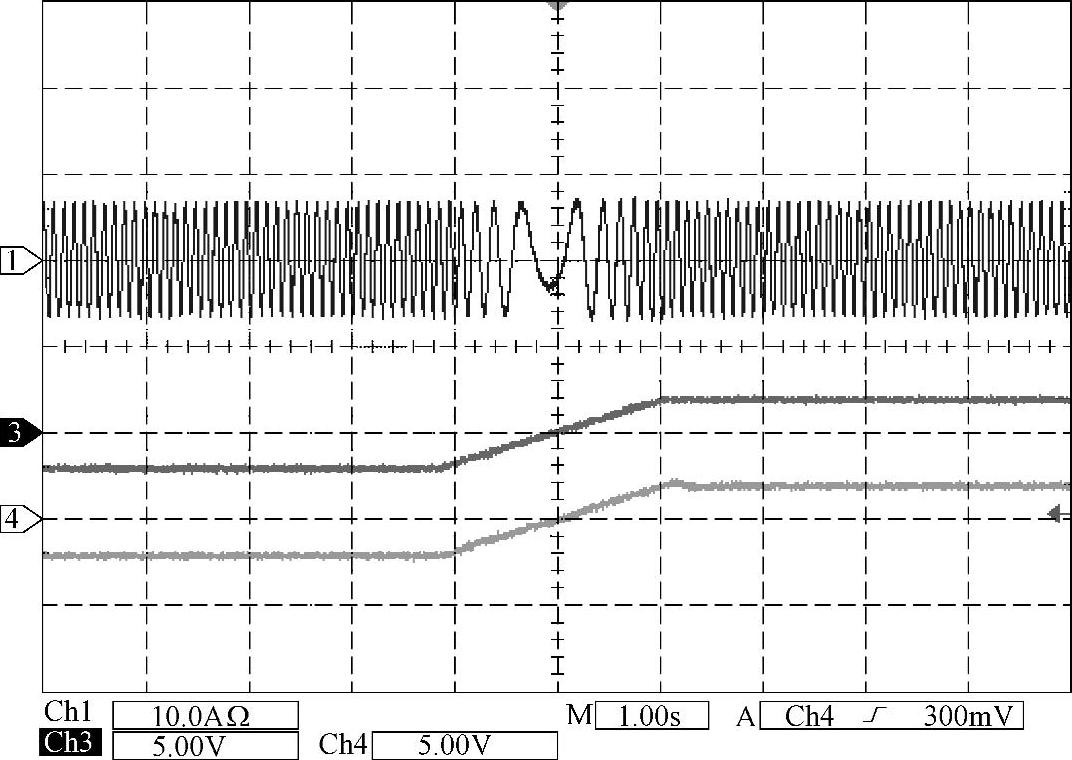
图5-17 电机正反转时转速跟踪波形
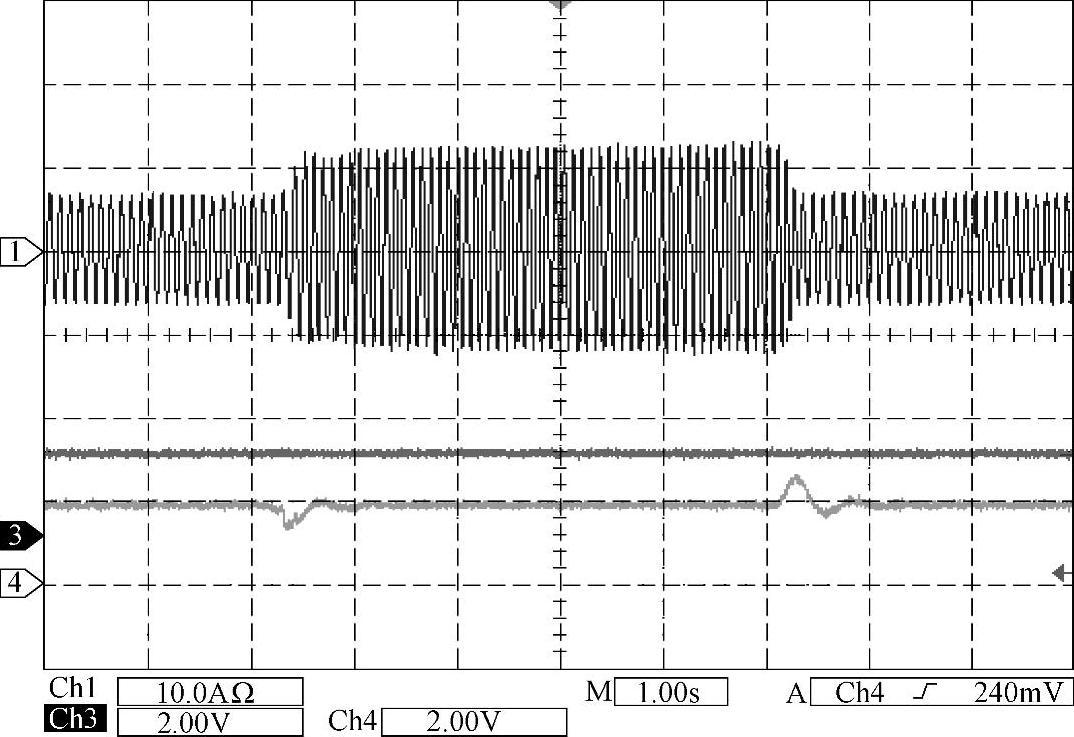
图5-18 电机加减额定负载时转速跟踪波形
1.滑模速度控制器
滑模速度控制器的输入为给定转速和反馈转速的误差,输出为转矩指令值。在磁通恒定时,转矩与q轴电流成正比,为简化起见,认为速度控制器的输出为转子磁场定向同步旋转坐标系下q轴电流指令值。设转速误差为eω=ω∗r-ωr,定义滑模面sω=eω=ω∗r-ωr,上标∗表示指令值。
采用指数趋近率,设计相应的滑模控制为

下面证明式(5-39)的稳定性。定义Lyapunov函数为
则有

由电机运动方程得

代入式(5-40)得

由于采用了内环电流闭环控制且通常电流环的响应速度要快于转速外环,可以认为is∗q=isq,把式(5-39)代入式(5-41)得

式中 为扰动项。
为扰动项。
当K′1与K′2足够大时, 成立,由Lyapunov稳定性定律知系统收敛到滑模面,有sω=0,即ω∗r=ωr。
成立,由Lyapunov稳定性定律知系统收敛到滑模面,有sω=0,即ω∗r=ωr。
当采用饱和函数sat()代替符号函数sgn()后,滑模控制的稳态精度可能会有所降低。这时可以在滑模控制后再增加一个积分项,即

2.滑模磁链控制器
滑模磁链控制器的输入为给定磁链和反馈磁链的误差,输出为转子磁场定向同步旋转坐标系下d轴电流指令值。设磁链误差为 ,定义滑模面sψ=
,定义滑模面sψ= ,上标∗表示指令值。
,上标∗表示指令值。
采用指数趋近率,设计相应的滑模控制为

下面证明式(5-45)的稳定性。定义Lyapunov函数为
则有

由磁通和励磁电流的关系可知

代入式(5-46)得(https://www.daowen.com)

由于采用了内环电流闭环控制,且通常电流环的响应速度要快于磁链外环,可以认为 ,又
,又 ,代入式(5-48)得
,代入式(5-48)得

式中
 ,
, ,
, 为扰动项。
为扰动项。
当K′3与K′4足够大时, 成立,由Lyapunov稳定性定律知系统收敛到滑模面,有sψ=0,即
成立,由Lyapunov稳定性定律知系统收敛到滑模面,有sψ=0,即 。
。
3.滑模电流控制器
电流控制对矢量控制异步电机传动来说非常重要,其直接影响着整个系统的动态响应。目前已有多种方法用于电流控制[12,13],如滞环控制、同步PI控制、同步PI加交叉解耦控制、预测控制等。滞环控制具有实现简单、鲁棒性强、动态响应快等优点,但其开关频率不固定;同步PI控制可实现稳态时的无差控制,但动态响应比较慢;同步PI控制的动态响应性能可以通过加入交叉解耦项后来改进,但依然受到电机参数的影响,解耦包括前馈解耦和反馈解耦,采用前馈解耦稳定性好,是目前较多采用的解耦方法;预测控制理论上性能最好,但这种方法的性能很大程度上依赖于电机参数的准确性,同时也受到反馈电流所含噪声的影响。为此这里提出了滑模电流控制器,利用滑模控制对参数变化的鲁棒性,以期提高电流控制的性能。
滑模电流控制器的输入为转子磁场定向同步旋转坐标系上给定电流和实际反馈电流的差,输出为指令电压。首先定义滑模面为S=[s1s2]T,其中 和
和 分别为isd和isq的指令值。
分别为isd和isq的指令值。

采用指数趋近率,设计相应的滑模控制为

下面证明式(5-51)的稳定性。定义Lyapunov函数为

其对时间的微分为

由转子磁场定向下的dq轴定子电压分量方程式可得
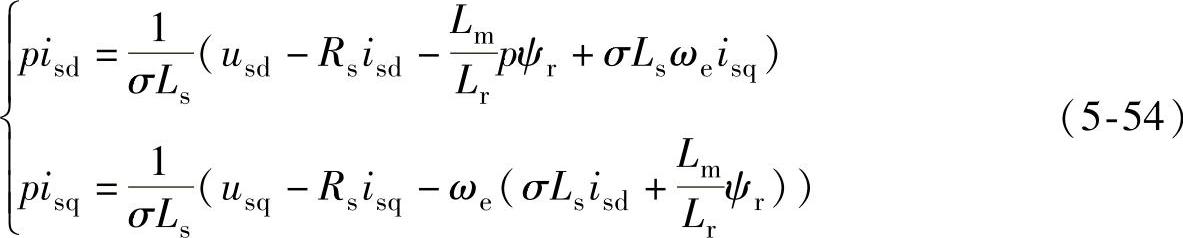
将式(5-54)代入到式(5-53)中,并认为 ,
, (在有死区补偿的情况下,通过SVPWM可以保证指令电压和实际电压相等),省去中间推导过程,最终可得
(在有死区补偿的情况下,通过SVPWM可以保证指令电压和实际电压相等),省去中间推导过程,最终可得

式中

只要满足kd>0,kq>0以及

就有V>0和pV<0成立。根据Lyapunov稳定性定律可知系统收敛到滑模面从而有s1=s2=0,即i∗sd=isd和i∗sq=isq成立。
需要指出的是,这里滑模控制的固定增益也不是任意选择的,要保证最后输出参考电压在直流母线电压可提供的范围之内。另外,与第2章滑模观测器一样,实际系统中为了防止滑模而导致的震颤现象,采用饱和函数sat()来代替符号函数sgn(x)。
4.仿真结果
图5-19所示是采用滑模控制时的仿真波形。电机参数开关频率为5kHz,直流母线电压为560V,电机参数为:2.2kW,2对极,380V/50Hz,定子电阻为2.8452Ω,转子电阻为2.4129Ω,互感为0.2687H,定子漏感和转子漏感均为12.8mH,转动惯量为0.01kg·m2。电机从静止空载起动到1500r/min,0.1s前进行闭环直流预励磁,0.1s时转子磁链达到给定值,然后空载起动电机至1500r/min,0.3s时突加80%的额定转矩,0.5s时突减负载。从图5-19a和图5-19b可以看出转速和磁链响应迅速,可以快速跟踪指令值,突加突减负载所造成的转速波动很小,转子磁链基本恒定,证明滑模控制对外加干扰具有较强的鲁棒性,系统具有良好的动静态性能。图5-19c和图5-19d所示是相应的d轴励磁电流和q轴转矩电流波形。从中可以看出,动态响应十分迅速,实际值可以较好地跟踪指令值。作为对比,图5-20给出了同样条件下采用PI控制时的仿真波形,从图5-20a可以看出转速出现了较大超调,在突加突减负载时转速有较大波动,而图5-20b表明磁链存在静差,图5-20c和图5-20d表明电流动态响应较慢,d轴电流在暂态过程中有波动。对比图5-19和图5-20,可以看出采用滑模控制时的电机动静态响应都要优于传统的PI控制,而且抗负载扰动能力强,具有较强的优越性。
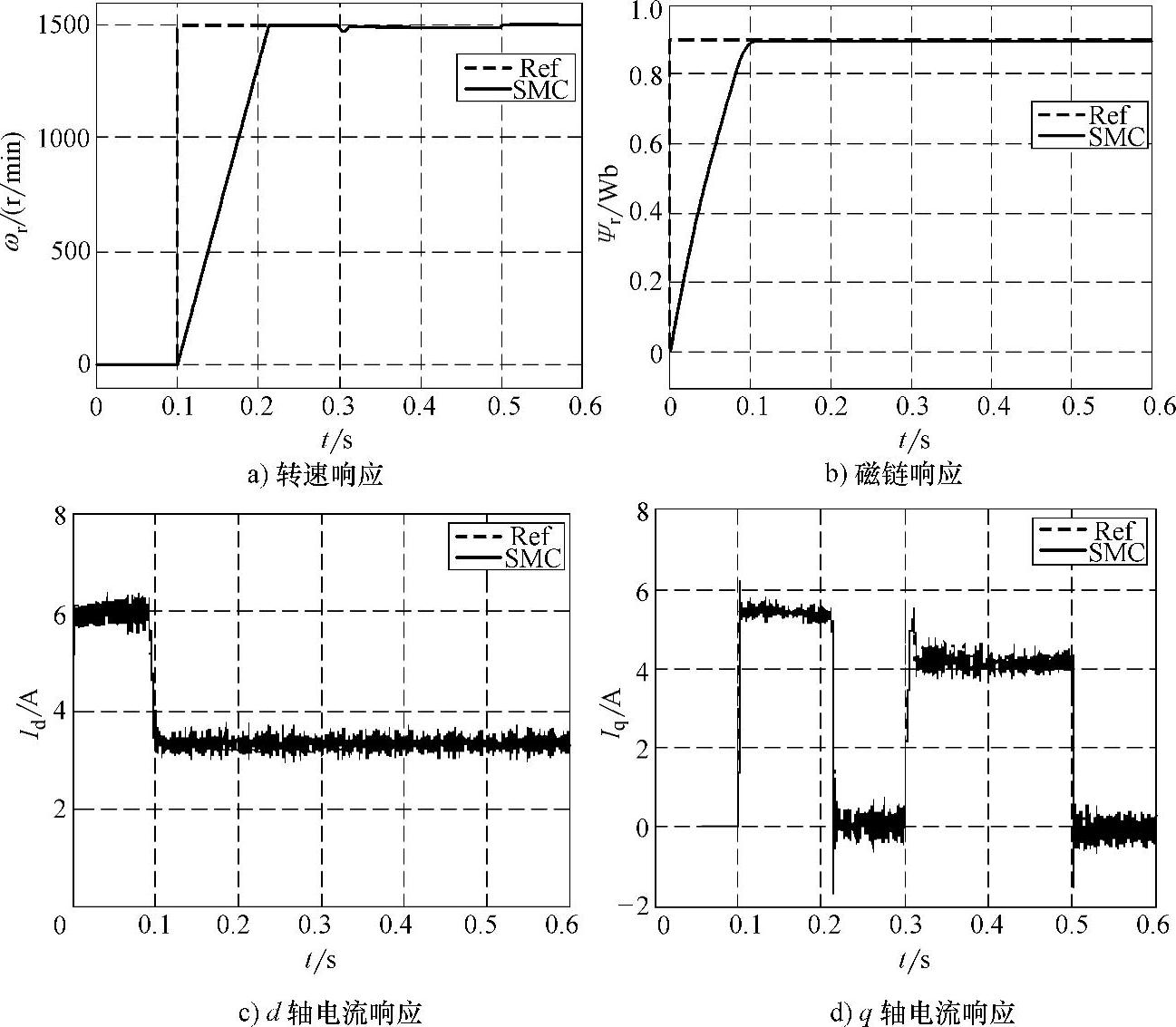
图5-19 采用滑模控制时的仿真波形
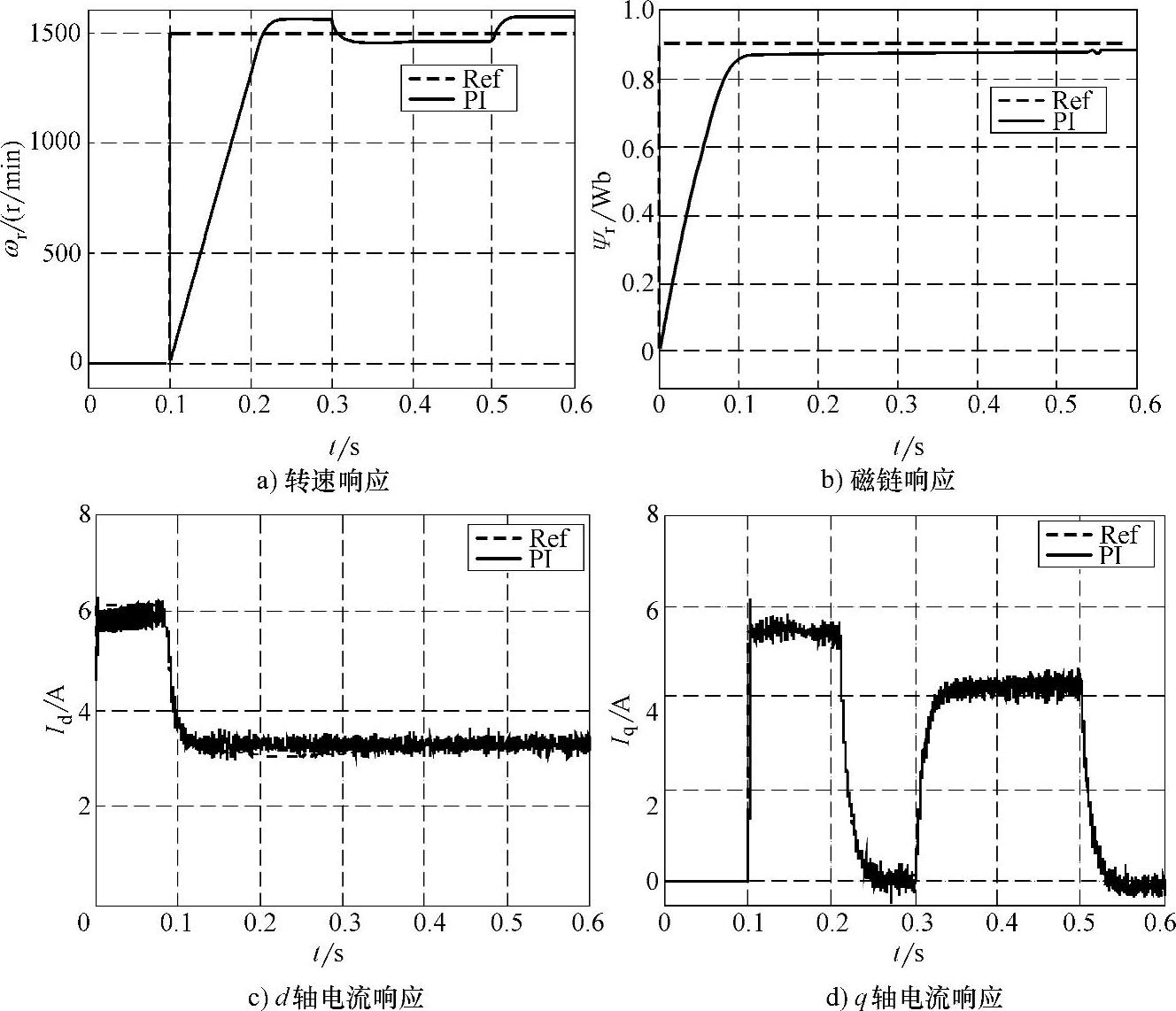
图5-20 采用PI控制时的仿真波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





