六、扩展知识
1.西门子S7-200PLC中如何设置内部寄存器的断电保持?
在使用西门子S7-200PLC时,有时需要使用到PLC的断电保持功能,即当PLC掉电后数据仍不丢失,当PLC上电后仍能使用该数据。
(1)数据保持方法
应用S7-200时,可以选用以下5种数据保持方法:
1)CPU的内置超级电容在断电时间不太长时,可以为数据和时钟的保持提供电源缓冲。一般保存时间为一周左右。
2)CPU上可以附加电池卡,与内置电容配合,长期为时钟和数据保持提供电源。一般保持时间为200天左右。
3)设置系统块,在CPU断电时自动保存M区中的14个字节数据。
4)在数据块中定义不需要更改的数据,下载到CPU内可以永久保存。
5)用户编程使用相应的特殊寄存器功能,将数据写入EEPROM永久保存。
要使用好PLC的数据保持功能,需要对S7-200PLC内部的数据断电保持功能和保持机制有详细的了解。
(2)S7-200的数据保持机制
S7-200系统中用到了3种存储器件。
1)RAM:易失性的存储器,失去电源供应后,其中保存的数据会丢失。S7-200CPU中的RAM由超级电容+外插电池卡提供电源缓冲。RAM保存V、M、T(定时器)、C(计数器)等各数据区的内容,在CPU失电后的表现由用户在系统块“数据保持”页中设置。RAM相当于计算机的内存存储。
2)EEPROM:非易失的电可擦除存储器,保存数据不需要供电,并且可以改写其内容。上述RAM数据区中有的部分与EEPROM中的区域一一对应。用户程序也永久保存在程序EEPROM区中。EEPROM相当于计算机的硬盘存储。
3)外插存储卡:非易失的存储器,用来保存用户程序、数据记录(归档)、配方数据以及一些其他文件等。
S7-200CPU的以下数据空间属于RAM存储区:
变量存储区(V):可以按位、字节、字或双字来存取V区数据。
位存储区(M):可以按位、字节、字或双字来存取M区数据。
定时器存储区(T):用于时间累计,分辨率分为1ms、10ms、100ms三种。
计数器存储区(C):用于累计其输入端脉冲电平由低到高的次数。CPU提供了3种类型的计数器:一种只能增计数;一种只能减计数;另外一种既可以增计数,又可以减计数。
RAM区的数据保持靠“内置超级电容+外插电池卡”的机制。
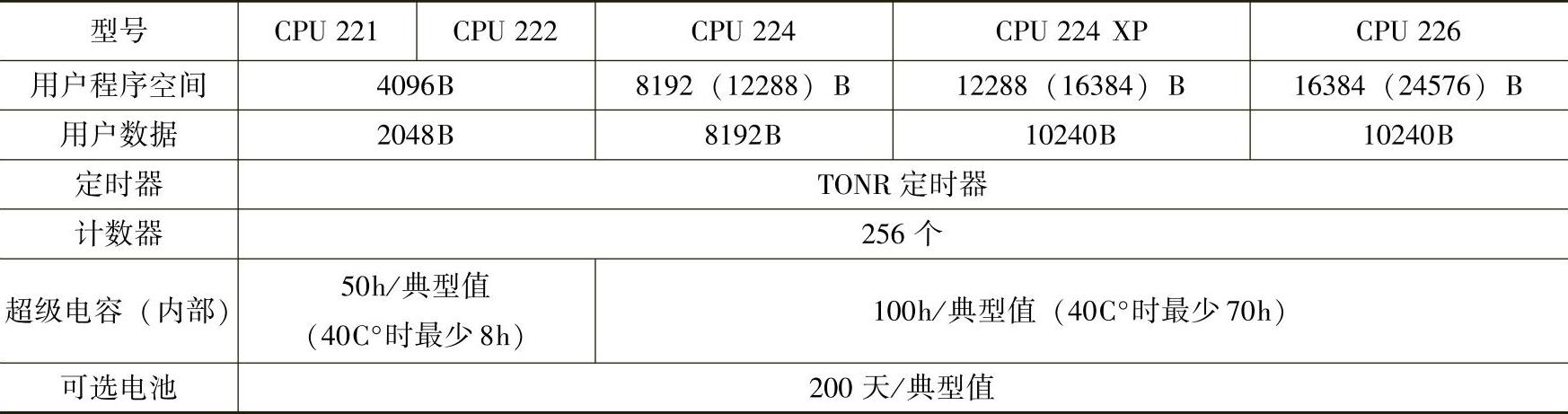
在CPU内部靠一个超级电容,在掉电后为RAM存储器提供电源缓冲,保存时间可达几天之久,具体时间见表2-2-5。CPU上电时,超级电容就可以充电。要获得规格表中的数据保持时间,电容必须连续充电24h。
S7-200还可选用外插电池卡(需单独订货),在超级电容耗尽后为RAM数据区提供电源缓冲。在连续无供电时,它可使用200天(即保持数据达200天)。CPU在不断电的情况下专用电池卡能够使用10年。电池卡需要单独购买,且电池卡是不可充电的,用完之后需要重新购买。
表2-2-5 S7-200CPU的数据保持范围和时间(内置超级电容)
RAM区中的数据能被超级电容和电池卡保持的前提是,必须将这些数据在STEP7-Micro/WIN32编程软件的系统块中设定V区、M区、T区、C区的掉电保持范围。
超级电容(+外插电池卡)也同时用于为CPU的实时时钟提供电源缓冲,如果放电完毕,CPU时钟会停止走动。
CPU内置的EEPROM存储器用于永久保存数据,包括与RAM数据区一一对应的全部的V存储区、部分M存储区(MB0~MB13)、定时器(TONR)。
数据可以用如下方式写入EEPROM数据区:
在编程软件Micro/WIN的Data Block(数据块)中定义V数据区存储单元的初始值,下载数据块时,这些数值也被写入到相应的EEPROM单元中。
用特殊存储器SMB31、SMW32,用编程方法将V存储区的数据写入EEPROM。在Sys-tem Block(系统块)中设置数据保持功能,可将MB0~MB13的内容在CPU断电时自动写入到EEPROM中。
下载的程序存储在EEPROM中,将会永久保存,断电后不会丢失。程序的大小不能超过CPU用户程序空间的大小。
(3)S7-200的数据保持的设置
S7-200的数据保持的设置是通过选择导航栏中的“系统块——断电数据保持”,在弹出的对话框中进行设置的,如图2-2-25所示。
2.PID控制
(1)反馈
当今的自动控制技术都是基于反馈的概念。反馈理论的要素包括3个部分:测量、比较和执行。测量关心的变量与期望值相比较,用这个误差纠正调节控制系统的响应。
这个理论和应用自动控制的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。
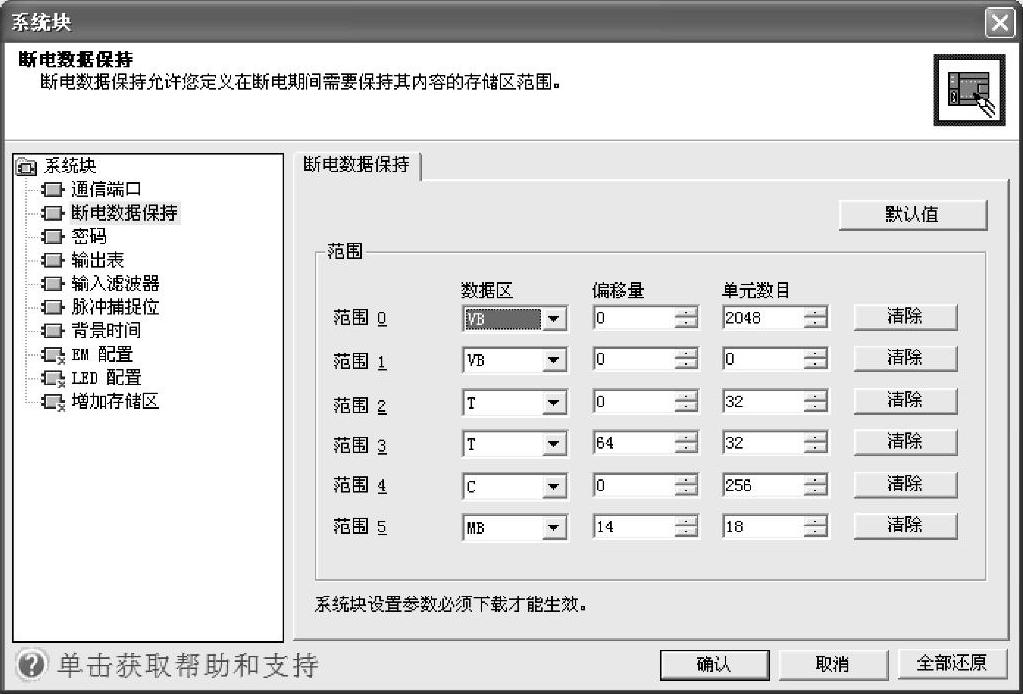
图2-2-25 S7-200的数据保持的设置
(2)经典控制模型
1)模拟控制系统:基本模拟反馈控制回路。
被控量的值由传感器或变送器来检测,这个值与给定值进行比较,得到偏差,模拟调节器依一定控制规律使操作变量变化,以使偏差趋近于零,其输出通过执行器作用于过程。控制规律用对应的模拟硬件来实现,控制规律的修改需要更换模拟硬件,如图2-2-26所示。
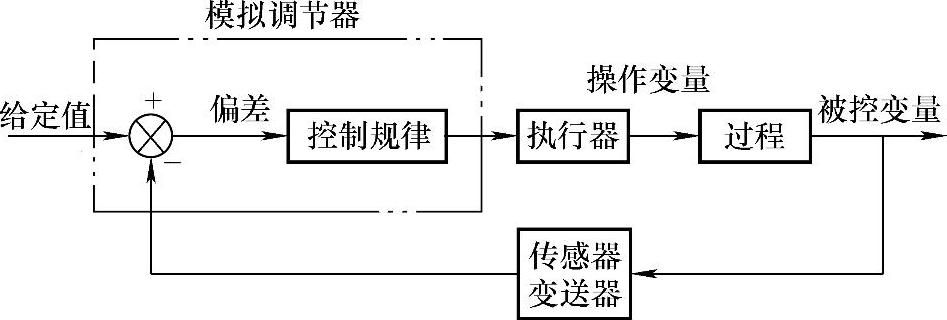
图 2-2-26
2)微机过程控制系统。
以微型计算机作为控制器。控制规律的实现,是通过软件来完成的。改变控制规律,只要改变相应的程序即可,如图2-2-27所示。
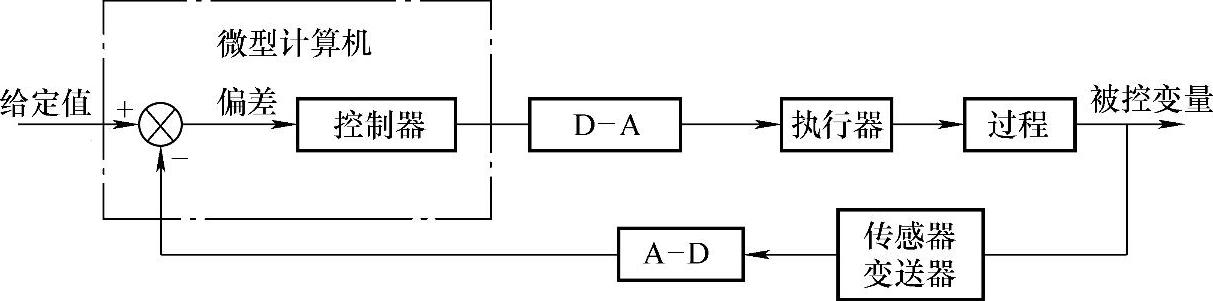
图 2-2-27
(3)PID控制器
PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。
PID调节器是一种线性调节器,它将给定值r(t)与实际输出值c(t)的偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进行控制。
PID调节器的微分方程

其中,e(t)=r(t)-c(t)。
PID调节器的传输函数

式中,KP为比例系数;TI为积分时间常数;TD为微分时间常数。
它由于用途广泛、使用灵活,已有系列化产品,使用中只需设定3个参数(KP、KI和KD)即可。在很多情况下,并不一定需要全部3个单元,可以取其中的1~2个单元,但比例控制单元是必不可少的。3个单元的作用如下:
1)比例环节:即时成比例地反映控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生控制作用以减小偏差。
2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。
3)微分环节:能反应偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。