家用吊车——“天和”机械臂
家用吊车——“天和”机械臂
“天和”机械臂安装在核心舱小柱段,伴随着“天和”核心舱发射。它不仅拥有舱体表面爬行、舱外状态监视、舱段转位、双臂级联、载荷照料、捕获悬停飞行器等能力,还能辅助航天员出舱。“问天”实验舱上天后将携带“问天”机械臂,通过双臂组合,运动范围由10m扩展到15m,自由度从7个扩展为14个,操作对象扩展至覆盖大、中、小型各类载荷。
1.“天和”机械臂档案
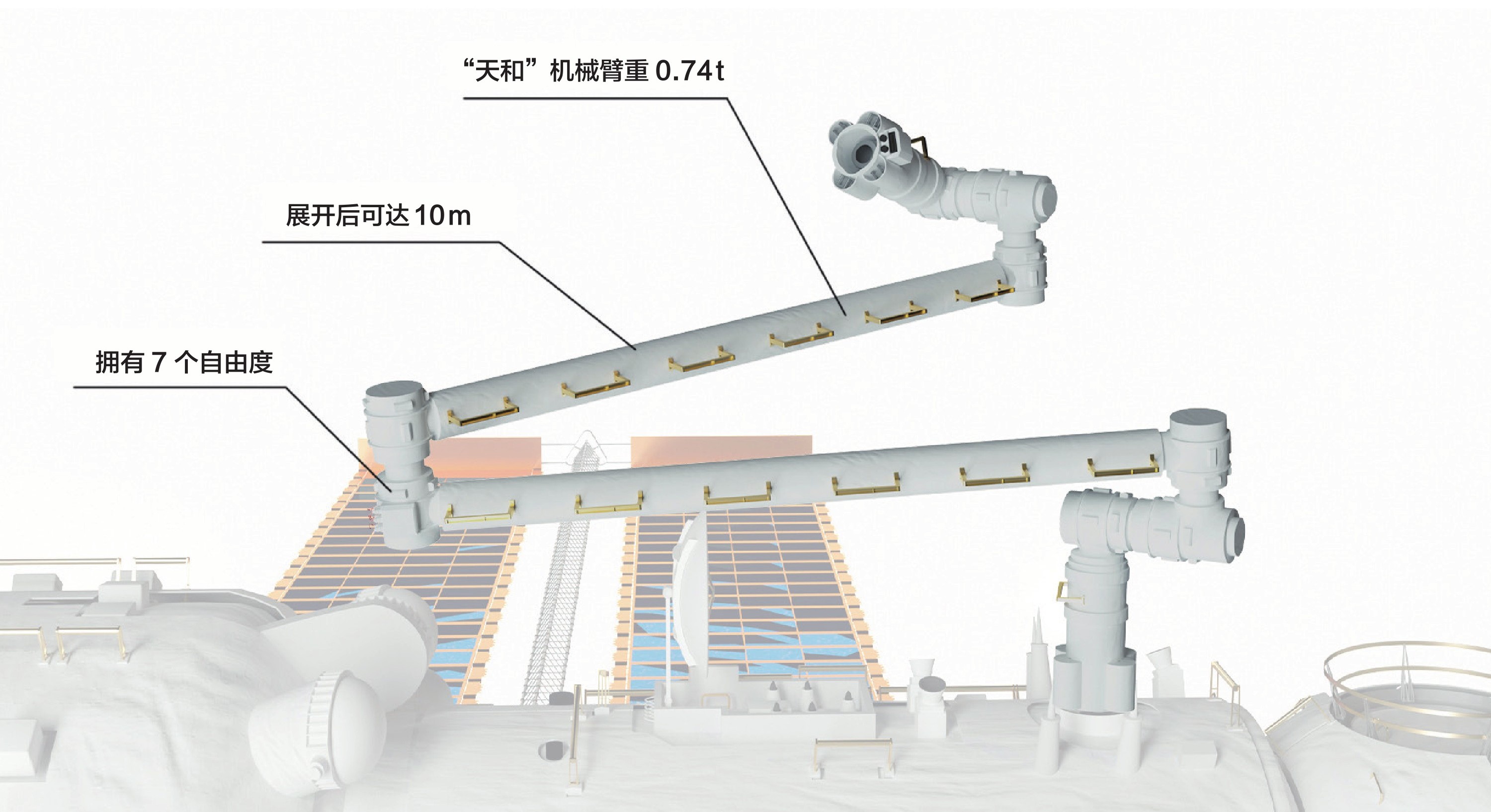
“天和”机械臂重0.74t,发射时位于核心舱小柱段,由关节、末端、中央控制器、相机、臂杆、适配器、操作台等组成,拥有7个自由度,展开后可达10m。
2.“天和”机械臂的使命
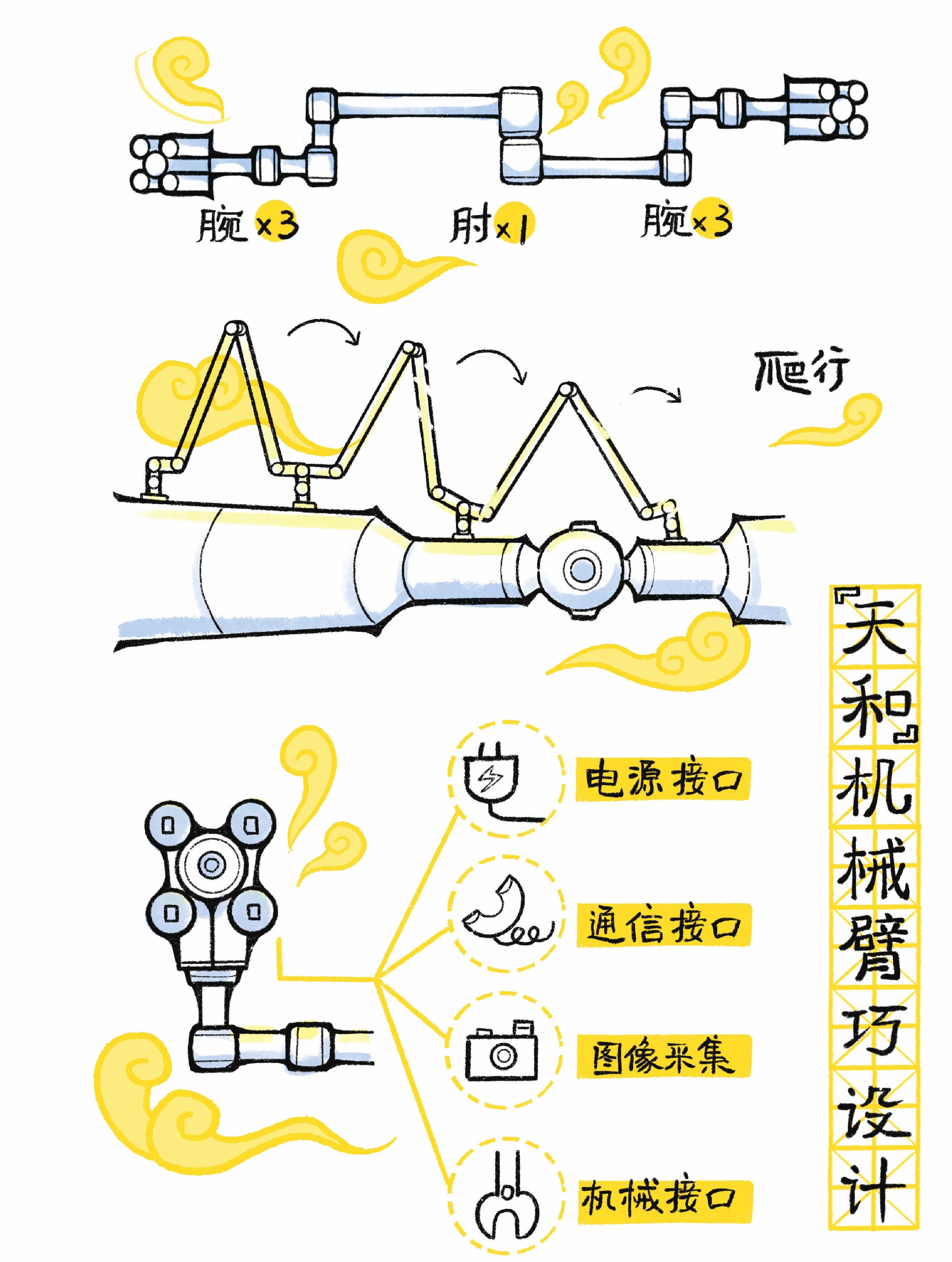
第一,舱外状态监视与舱表状态检查。空间站外表面配置了许多暴露的实验载荷,时刻面临着微流星体和空间碎片撞击的危险。因此,定期对空间站舱外与舱表状态进行检查确认是机械臂的主要工作之一。为此,“天和”机械臂装备了一套视觉监视系统,在肘部、腕部各配备一台视觉相机。机械臂在舱体表面爬行时,视觉相机也会实时监视舱体表面的情况,就如同空间站伸出了一根大大的自拍杆,能实现360°全覆盖、无死角监视,非常巧妙地实现了对空间站舱外设备的巡检功能。
第二,辅助航天员出舱活动。空间站组合体规模庞大,单次出舱时间可能长达6小时。虽然空间站舱表布置了很多辅助航天员进行舱外活动的扶手,但这仅限于小范围的太空活动,需要借助“天和”机械臂实现航天员的大范围转移。航天员出舱时会携带两个关键工具——脚限位器和舱外操作台。出舱后,航天员会先将这两个工具安装在“天和”机械臂末端的固定位置上,然后便可以脚踩限位器,手扶操作台,由机械臂安全平稳地护送至目标位置。

航天员站在“天和”机械臂末端的脚限位器上开展出舱活动。
图片来源:中国载人航天工程网
第三,开展空间站在轨建造任务。两个实验舱无法直接与核心舱的侧向停泊口对接,而是要先与核心舱的前向对接口对接,然后再转位至侧向停泊口。“天和”机械臂具备承载实验舱并实施转位对接的能力,控制精度可达到毫米级。此外,“天和”机械臂还可实现捕获悬停航天器、辅助对接、转移货运飞船载荷、辅助航天员转移大型舱外设备等一系列在轨操作功能。
3.“天和”机械臂的巧设计
“天和”机械臂采用了“腕3+肘1+腕3”的关节配置方案,机械臂通过末端执行器与目标适配器对接和分离,同时配合各关节的联合运动,就能实现机械臂在舱体上的爬行转移功能。此外,“天和”机械臂的末端上除了对接与分离的机械接口外,还供配了电源接口、通信接口和其他一系列功能接口。这样一来,只要机械臂的末端与目标适配器固连,适配器就可以为整条机械臂供电。