2.2.2 桨距角控制建模
2026年01月15日
2.2.2 桨距角控制建模
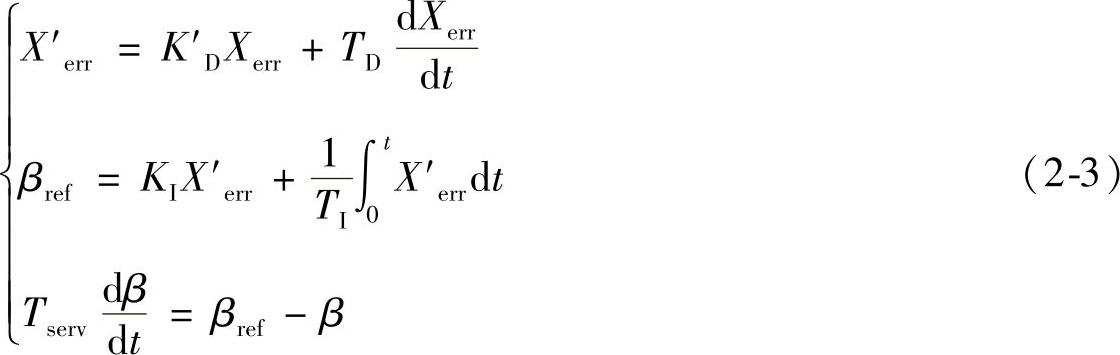
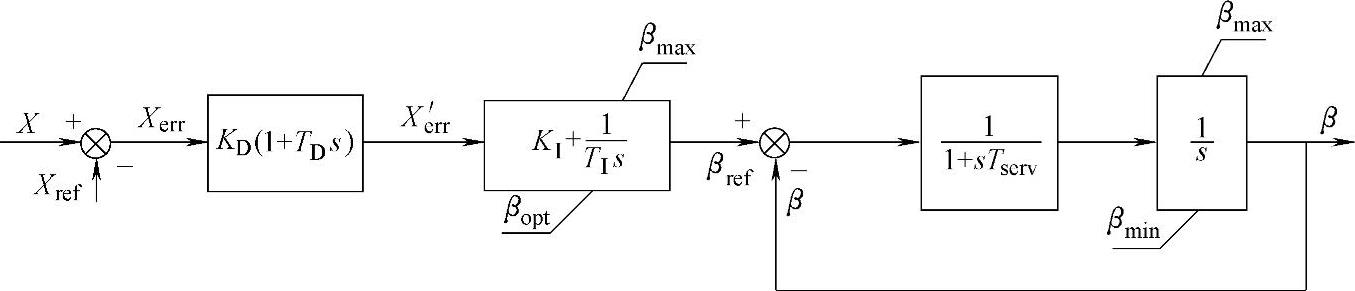
为了获得最大的输入机械转矩,通常情况下叶片的桨距角保持在0°,当桨距角控制系统输入量超过限值时,控制器动作增大叶片的桨距角。桨距角控制系统模型如图2-2所示,控制方程为
 (https://www.daowen.com)
(https://www.daowen.com)
图2-2 桨距角控制系统模型
式中,KD、TD为比例微分控制器的比例系数和微分系数;KI、TI为比例积分控制器的比例系数和积分系数;Tserv是桨距角控制器中伺服系统的时间常数;β为桨距角;Xerr为误差信号;βref为桨距角基准值。
图2-2中,Xref为控制量的基准值;βmax为桨距角的最大值;βopt为桨距角最优值;βmin为桨距角的最小值。X为控制量,可选择以下几种变量[2]:①电气量,如风电机组输出的有功功率;②机械量,如发电机转速;③电气量和机械量的组合。
桨距角控制系统将控制量X与其基准值Xref比较,将误差信号Xerr送入比例微分(PD)控制器,然后传到比例积分(PI)控制器生成桨距角基准值βref。