2.1.1 低空监视雷达
2.1.1.1 低空监视雷达概述
1)雷达的工作原理
雷达是一种电磁传感器,用来对反射性物体检测和定位。其工作可以归纳如下:
(1)雷达通过天线辐射电磁能量,使其在空中传播。
(2)部分辐射的能量被雷达某个距离上的反射体(目标)截获。
(3)目标截获的能量重新辐射到许多方向上。
(4)一部分重新辐射的(回波)能量返回至雷达天线,并被雷达天线接收。
(5)在被接收机放大和做合适的信号处理后,在接收机的输出端做出目标回波是否存在的判决。此时,目标的位置和其他可能有关的信息就能被获取到。
雷达可以在远或近距离,以及在光学和红外传感器不能穿透的条件下完成任务。它可以在黑暗、薄雾、浓雾、下雨和下雪时工作。其高精度测距和全天候工作能力是其最重要的属性之一。
图2-1为雷达的基本框图,展示了一部雷达中常见的组成。
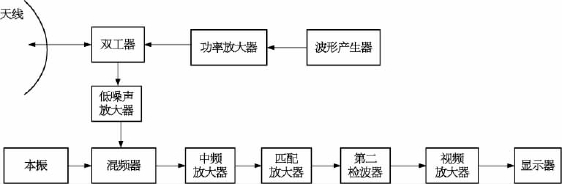
图2-1 雷达的基本框图
图2-1中的功率放大器,为雷达执行特定任务产生合适的波形。其平均功率可能小到毫瓦级也可能大到兆瓦级(平均功率比峰值功率能更好地表明雷达性能指标)。多数雷达使用短脉冲波形,以便一部天线在时间分享的基础上用于发射和接收。雷达发射机不仅必须能够在最大距离上产生检测期望目标需要的峰值和平均功率,而且要能产生特定应用所需要的合适波形和稳定的信号。发射机可以是振荡器或放大器,但后者通常有更多的优点。
双工器的功能是,允许使用单个天线在发射机工作时保护敏感的接收机不被烧坏,并且引导接收的回波信号到接收机而不是发射机。
天线是把发射能量辐射到空间然后在接收时收集回波能量的设备。天线几乎总是定向的,把能量辐射到窄波束中,以此聚集功率的同时可以判定目标方向。一个发射时产生窄定向波束的天线,在接收时通常具有较大的面积,以便从目标收集微弱的回波信号。天线不仅在发射时聚集能量和在接收时收集回波能量,还可以作为一个空间滤波器,提供角度分辨和其他能力。
接收机将接收到的微弱信号放大到可检测到其存在的电平。因为噪声是雷达做出可靠检测判决并提取目标信息的最终制约,要注意保证接收机自身产生很低的内部噪声。大部分雷达工作在微波频段,影响雷达性能的噪声通常来自接收机的第一级,即为图2-1中的低噪声放大器。许多雷达应用中对检测的限制是不需要的环境回波(称为杂波),这时接收机要有足够大的动态范围,其定义为接收机能以某些规定性能工作的最大和最小输入功率电平的比。信号处理器通常位于接收机的中频部分,可描述为接收机从不需要且会降低检测性能的信号中分离出需要信号的部分。信号处理器包括使输出信噪比最大的匹配滤波器,也包括当杂波比噪声较大时使移动目标信噪比最大的多普勒处理。多普勒处理能分离不同的动目标或从杂波中分离出动目标。检测判决在接收机输出端进行,当接收机输出超过预定的门限时就宣告存在目标。如果门限设置过低,接收机噪声会造成过多的虚警;如果门限设置过高,可能会漏掉检测到的目标。决定判决门限电平的准则是如何设定门限,使其产生可接受的预定的由接收机的噪声产生的平均虚警率。
在检测判决做出后,就可以确定目标的轨迹,即在一段时间内测得的目标位置轨迹。这是数据处理的一个示例,处理过的目标检测信息或轨迹可显示给操作者;或用来自动引导导弹到目标;或雷达输出可以经过进一步处理以提供目标性质的其他信息。雷达控制器可以保证雷达的不同部分协同工作。
2)雷达的发展阶段
雷达诞生于20世纪30年代,从世界雷达装备技术发展来看,雷达的发展大致经历了四个阶段。
第一阶段是从20世纪30年代到50年代,为实施国土防空警戒、指挥和引导己方作战飞机以及各种地面防空武器,西方研制部署大量米波段雷达和以磁控管为发射机功率部件的微波雷达。当时雷达探测目标(主要是飞机)的种类简单,信号处理为动目标显示(moving target indication,MTI),以手动为主要录取方式,自动化程度低、可靠性较差,雷达的典型技术特征是电子管、非相参。
第二阶段是从20世纪50年代到80年代,防空作战对雷达提出了精确引导的要求,使非相参技术体制逐渐被淘汰,转而开始发展稳定性和可靠性较高的全相参微波雷达,发射机大量使用速调管、行波管和前向波管等作为功率部件,信号处理为数字MTI,以自动为主要录取方式,自动化程度较高、可靠性较高,其技术特征是半导体、全相参。
第三阶段是从20世纪80年代到20世纪末,为满足现代空战对雷达高精度、高分辨力、高抗干扰能力、多目标跟踪能力、高可靠性和维修性的要求,有效应对复杂电磁环境下低空高速目标的要求,开始发展大规模集成电路、全固态、相控阵技术。信号处理为自适应动目标检测(adaptive moving targets detection,AMTD),以自动录取和自动状态监测为主,双通道冗余,极大提高了雷达的可靠性、维修性、可用性和安全性,雷达发展到更为完善和实用的阶段。
随着隐身目标、低空低速和高空高速目标的出现,以及电磁环境的日益恶劣,雷达技术目前正在向多功能、自适应、目标识别发展,这是雷达发展的第四阶段。
3)雷达的分类
雷达已问世近百年,在空管中,利用雷达的监视作用,可以有效地保证飞行安全。雷达的基本任务有两个,一个是发现目标的存在,另一个是测量目标的参数。现代空管系统中常用的空管雷达有一次监视雷达(PSR)、二次监视雷达(SSR)、气象雷达(WR)、精密进近雷达(PAR)和场面监视雷达(SMR)等。
空中交通管理监视雷达主要分为一次监视雷达(简称“一次雷达”)和二次监视雷达(简称“二次雷达”)。一次雷达是反射式雷达;二次雷达最初是在空战中为了使雷达分辨出敌我双方的飞机而发展的敌我识别系统,用于空中交通管制后,就成为二次雷达系统。二次雷达实际上不是单一的雷达,而是包括雷达信标及数据处理在内的一套系统。
精密进近雷达是一种安装于跑道一侧的精密跟踪雷达,主要用于监视和跟踪飞机的起降,如美国雷神(Raytheon)公司的PARM 雷达。
地面监视雷达是一种监控机场地面上飞机和各种车辆运动情况的高分辨雷达,也叫场面监视雷达。它主要的作用是在能见度低的时候提供飞机和车辆的位置信息,由于它的价格较高,机场通常没有这种设备。代表产品有美国Cardion公司的ASDE-3雷达。
气象雷达是一种探测降雨和风场分布等气象参数的监视雷达,其主要作用是减少因天气造成的飞行延迟和对飞行安全的影响。
2.1.1.2 一次雷达
1)一次雷达的工作原理
一次雷达广泛用于军用和民用。其工作原理是:通过辐射无线电波,检查目标是否反射回波及反射波的特性,可测得目标的信息和位置(图2-2)。根据雷达发射信号与反射波的时间差,可测得目标的距离;根据对目标的连续探测,可获得相对雷达的速度;根据回波的波前到达雷达的角度,探测方位角。当发射电波后接收目标的反射波通过该种方式获得距离和范围信息的雷达,称为一次雷达。
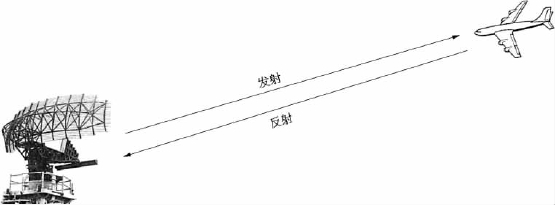
图2-2 一次雷达工作原理
一次雷达发射的一小部分无线电脉冲被目标反射回来,并由该雷达收回加以处理和显示,在显示器上只显示一个亮点而无其他数据。一次雷达通常由天线、发射机、接收机、定时器、显示器及天线控制系统等主要部分组成,如图2-3所示。
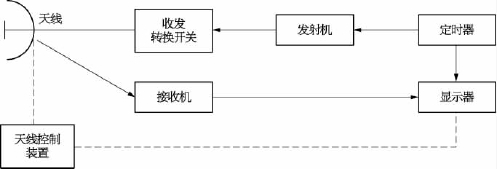
图2-3 一次雷达的基本框图
定时器产生定时触发脉冲,并把它送到发射机、显示器等各雷达分系统,控制雷达全机同步工作。发射机在触发脉冲控制下产生射频脉冲进行发射。收发转换开关在发射期间将发射机与天线接通并断开接收机,而在其余时间将天线与接收机接通并断开发射机。对于收发共用一副天线的雷达来说,必须具有收发转换开关。天线将发射机输出的电磁波形成波束来实现定向辐射,并且接收由目标发射回来的电磁波。接收机将回波信号放大、滤波,并变换成视频回波脉冲,然后送入显示器。显示器是雷达的终端设备之一,用来显示目标回波并指示目标位置,是操作员操作、控制雷达工作的装置。天线控制装置(亦称“伺服装置”)可以控制天线转动,使天线波束依照一定的方式在空间扫描。
2)一次雷达的分类
(1)机场监视雷达(ASR)。它的作用距离为100~300 km,主要是塔台管制员或进近管制员使用,如美国雷神公司的ASR-10SS雷达(图2-4)。

图2-4 雷神ASR-10SS雷达
(2)航路监视雷达(ARSR)。设置在航管控制中心或相应航路点上。探测范围在250 km 以上,高度可达13 000 m。它的功率比ASR大,覆盖整个航路,这样管制员就可以对航路飞行的飞机实施雷达间隔,如美国雷神公司的ASR-23SS雷达(图2-5)。

图2-5 雷神ASR-23SS雷达
(3)机场地面探测设备(airport surface detection,ASD)(图2-6)。它的功率较小,作用距离一般为1英里(1英里≈1.609 km),主要用于特别繁忙机场的地面监控,它可以监控在机场地面上运动的飞机和各种车辆,塔台管制员用它来控制地面车辆和起降飞机的地面运行,以保证安全。它的主要作用是在能见度低的时候提供飞机和车辆的位置信息,由于它的价格较高,因此机场通常没有这种设备。
3)一次雷达能够测量的物理量
(1)距离。根据雷达发射信号与回波之间的延时,可测得目标(飞机)的距离。
(2)速度。根据对目标(飞机)距离的连续测量,可获得目标(飞机)相对于雷达的速度。
(3)角方位。通过测量回波的波前到达雷达的角度,可以确定目标(飞机)所在的角方位。
4)一次雷达的优点
一次雷达的优点是可在荧光屏幕上显示探测目标的方位、距离、移动速度和移动方向,而不需要探测目标应答(根据应答信息确定信息则成为二次雷达)。
5)一次雷达的缺点
(1)不能识别高度。
(2)不能识别代码。

图2-6 机场地面探测设备
(3)反射回波较弱,易受固定目标的干扰。
2.1.1.3 二次雷达
1)二次雷达概述
二次雷达也称为空管雷达信标系统(air traffic control radar beacon system,ATCRBS)。20世纪70年代初,计算机技术和雷达结合实现了航管雷达的全自动化。这种系统把一次雷达和二次雷达的数据都输入数据处理系统。高速运转的计算机接收来自三个方面的数据:第一是一次雷达的雷达信息;第二是二次雷达来的信标信息,并把它转换成数字码;第三是由航管中心输入的飞行进程数据,即飞行计划的各种数据。这个系统跟踪一架飞机时,如果它的飞行计划已经报告给航管中心,这时计算机中已经存储了有关数据,在显示屏幕上就会把这架飞机在下一步预计的位置和高度显示出来,管制员就可以完全脱离进程单,直接在雷达屏幕上得到飞机的全部有关数据。这个系统极大地改善了空中管制环境,提高了管制效率。它最初是在空战中为了使雷达分辨出敌我双方的飞机而发展的敌我识别系统,当把这个系统的基本原理和部件经过发展后用于民航的空中交通管制,就成为二次雷达系统。
二次雷达是由询问雷达和应答雷达所组成的无线电电子测位和辨认系统。询问雷达发射电磁波,应答雷达(又称雷达信标)接收到询问电磁波后被触发,发射应答电磁波,询问雷达根据接收到的应答电磁波而工作,实现识辨和测位。二次雷达的询问雷达和目标上的应答雷达之间按主动扫描询问和被动应答配合工作。询问雷达一般固定在地面,其扫描波束的脉冲用询问信号编码,应答雷达的应答脉冲带有自身代号的编码。询问脉冲和应答脉冲的载波频率是不同的,因而可防止误收发射波。二次雷达是一种把已测到的目标与以应答机形式相配合的设备协调起来的雷达系统,能在显示器上显示出标牌、符号、编号、航班号、高度和运行轨迹等及特殊字符。
2)二次雷达的特点
管制员从二次雷达上很容易得知飞机的二次雷达应答机代码、飞行高度、飞行速度和航向等参数,使雷达由监视的工具变为空中管制的手段,二次雷达的出现是空中交通管制最重大的技术进展。二次雷达主要有以下特点:
(1)二次雷达要和一次雷达一起工作,它的主天线安装在一次雷达的上方,和一次雷达同步旋转。
(2)二次雷达系统的另一重要组成部分是飞机上装的应答机,应答机在接收到地面二次雷达发出的询问信号后,进行相应回答。
(3)通过二次雷达很容易知道飞机的编号、高度、方向等参数,使雷达由监视的工具变为空中管制的手段。
3)二次雷达的工作方式
二次雷达的工作方式与一次雷达不同,它是由地面询问机和机载应答机配合而成,采用的是问答方式(图2-7)。
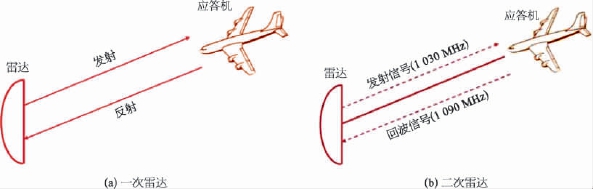
图2-7 一次雷达和二次雷达工作原理对比
二次雷达实际上是同时利用了雷达和通信的特点。所谓雷达的特点是指它可以用来确定目标的距离和方位,而通信的特点是指它可以从目标应答机信号中获取一般雷达信号所没有的信息。作为全球范围内广泛使用的二次监视雷达工作时,首先是地面二次雷达发射机发射1 030 MHz的询问脉冲信号,向机载设备发出询问,机载应答机在接收到有效询问信号后产生相应的频率为1 090 MHz的应答信号向地面发射。地面二次雷达接收机接收到应答信号,经过计算机系统一系列处理后获得所需的各种信息。可见,二次雷达系统必须经过二次雷达发射机和机载应答机的两次有源辐射才能实现其功能(图2-8)。
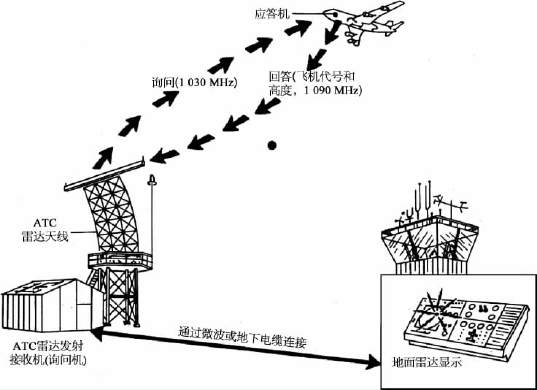
图2-8 航管雷达工作原理示意图
二次雷达发射的脉冲是成对的,它的频率是1 030 MHz,每一对脉冲之间的时间间隔是固定的,这个间隔决定了二次雷达的模式。民航使用的是两种模式:一种间隔为8 ms,称为A模式;另一种间隔21 ms,称为C模式,每一对脉冲之间有不同的时间间隔,可以确定不同的时间间隔,从而可以确定不同的询问工作模式(图2-9)。二次雷达系统的另一重要组成部分是飞机上装的应答机,应答机是一个在接收到相应的信号后能发出不同形式编码信号的无线电收发机,应答机在接收到地面二次雷达发出的询问信号后,进行相应回答。这些信号被地面的二次雷达天线接收,经过译码,就在一次雷达屏幕上出现的显示这架飞机的亮点旁边显示出飞机的识别号码和高度,管制员就会很容易地了解到飞机的位置和代号。目前民航使用的是A模式和C模式,在新航行系统中还出现了S模式。
二次雷达系统的另一部分是飞机上的应答机。应答机在接收到地面二次雷达发出的询问信号后发出不同形式的编码信号。应答信号是一个脉冲序列,它的第一个和最后一个脉冲是结构脉冲,标识这一系列脉冲的起始与终止,除中间一个脉冲备用外,其余12个脉冲组成一个八进制编码系统,形成一个4位数编码。A模式询问脉冲,应答代表飞机识别号码;C模式询问脉冲,应答代表高度。
二次雷达的旋转天线在发出信号时,主波从正前方发出,同时在主波周围发射低能量旁波瓣,如果应答机对这些波瓣应答,则会出现假信号。
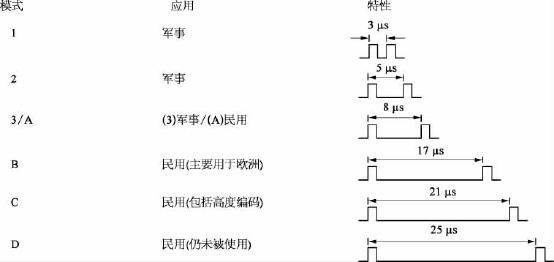
图2-9 雷达的询问模式图
为了防止该情况,二次雷达在旋转天线旁边设置一根全向天线。如图2-10所示,在询问脉冲对的第一个脉冲后2μs发出脉冲,强度与脉冲对相等,如果应答机接到3个脉冲强度相等,表明收到的是主波瓣的信号,给予回答;如果收到的信号中,中间一个强而前后弱,表明收到的是旁波瓣的脉冲,不予回答,从而避免干扰。
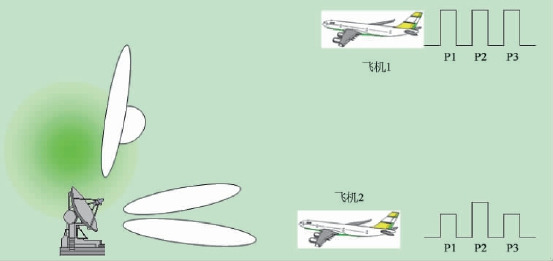
图2-10 旁波瓣抑制
二次雷达出现这种旁瓣干扰或者应答信号混叠的现象,主要原因就是其询问信号和应答信号过于简单,在其询问信号中没有指明是哪一架飞机进行询问,而在新航行系统的监视中占主要地位的S-SSR,即选择模式的二次雷达,可以有效地解决这一问题。
4)二次雷达相比一次雷达的优点
与一次雷达相比,二次雷达具有回波强、无杂波干扰、无目标闪烁现象、精度高和能提供信息识别等优点,具体如下:
(1)机载应答器回波比一次雷达目标反射回波强得多,对应答器的应答功率要求不高,
应答器的体积、重量可以很小。
(2)询问信号与应答信号的射频波长不等,消除了地物杂物和气象杂波的干扰。
(3)二次雷达的回波与目标有效反射面积无关,也就无目标闪烁现象。
(4)二次雷达的高度信息由飞机上的高度计产生,其精度要比一次雷达高。
(5)二次雷达提供信息识别,即军用或民用飞机的代号,当飞机发生故障、通信系统时效或遇到挟持时,能提供危机告警信息。
2.1.1.4 气象雷达
气象雷达或称气象监视雷达(weather radar,WR),是用来探测大气中的降水类型(雨、雪或冰雹等)、分布、移动和演变,并可对其未来分布和强度做出预测的一种雷达设备。现代气象雷达大部分属于脉冲多普勒雷达,可以监测降水的分布及强度。这些数据可以用来分析风暴的结构以及其是否在未来造成恶劣天气。
气象雷达是探测气象情况以及其他气象信息的雷达系统,可以及时了解到探测目标的轮廓、雷雨区的强度、雷雨区的方位和距离等信息,并将信息反馈到显示设备上。气象雷达在天气预警和预报过程中的应用十分广泛,是各种天气系统的主要探测工具之一。常规的雷达装置主要包括定向天线、发射机、接收机、天线控制器和显示器等,每一个装置协调发挥作用,在各种灾害性、突发性天气的预报和警报中具有极其重要的作用。
1)气象雷达的发展历程
第二次世界大战期间,军事雷达操作员就注意到了因雨、雪、冻雨等天气因素接收到的回波噪声。战后,军事科学家得以继续研究如何利用这些回波。前美国空军、后任职于麻省理工学院的大卫阿特拉斯开发了第一个实用气象雷达。在加拿大,马修和道格拉斯于蒙特利尔成立了“风暴天气小组”。马修和他的博士生沃特·帕玛(Walter Palmer)专注于研究中纬地区降水滴谱,并由此发现了降水速率和雷达反射率之间的关系。英国则继续进行雷达回波模式和气象要素如层云降水和对流云之间关系的研究,并试验了1~10 cm范围内的不同波段效果。
1953年,从事美国伊利诺伊州水资源调查工作的电气工程师唐纳·史戴格,第一次利用雷达记录到了与龙卷风相关的钩状回波(图2-11)。
1950—1980年,用于定位天气系统及探测降水强度的反射雷达气象服务在世界范围内建立起来。早期的气象学者通过阴极射线管来获取信息,到了20世纪70年代,雷达观测开始标准化并组成观测网。第一个雷达回波成像设备诞生后,雷达发展到可以扫描降水系统的三维层面,使等高平面的景象和垂直的状况均能够得以展现。加拿大的阿尔伯塔省冰雹计划和美国的国家强风暴实验室因此得以研究雷暴结构。
美国国家强风暴实验室始建于1964年,起初研究双偏振信号和多普勒效应在气象雷达上的应用。1973年5月,一场龙卷风袭击了俄克拉何马城西部的尤宁城。该实验室的10 cm 波段多普勒气象雷达第一次记录下了龙卷风的整个生命周期。从这一成果中发现了龙卷风发生前高空云的中尺度涡旋即龙卷风涡旋,这使得美国国家气象局认识到多普勒天气雷达是极好的龙卷风预报设备。而1974年4月3—4日龙卷风超级爆发造成的毁灭性破坏,使多普勒雷达的研究得到了更多的资金支持。
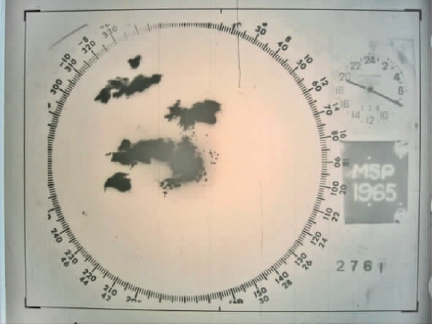
图2-11 美国双子城的龙卷风及形成它的超级单体风暴
1980—2000年,气象雷达网在北美洲、欧洲、日本等发达地区或国家普遍建立,可探测大气中微粒移动速度的多普勒雷达也替代了只能探测天气系统位置和强度的传统雷达。美国于1988年正式进行10 cm 波段气象雷达的布网建设,称之为下一代气象雷达或WSR-88D。1985年,加拿大建立了配备5 cm 波段的多普勒气象雷达的金城雷达站;1993年,麦吉尔大学的马修雷达观测站也采用了多普勒雷达。完整的加拿大多普勒气象雷达网在1998年到2004年间建成。法国和其他欧洲国家则直到20世纪末21世纪初才逐步采用多普勒网络系统。其间,受惠于计算机技术的迅猛发展,科学家们已经可以利用计算机算法分析恶劣天气,并由此开发了一系列供给媒体展示或科学研究的气象产品。
2000年后,双偏振技术投入使用,这增加了关于有效降水类型(如雨和雪的对比)的信息获取。“双偏振”是指既能发射和接收水平偏振波,又能发射和接收垂直偏振波的微波辐射。当时预计美国、法国和加拿大等国家将在近10年内大规模发展该技术。
2003 年起,美国国家海洋和大气管理局(National Oceanic and Atmospheric Administration,NOAA)开始着手用相控阵雷达代替传统的抛物形天线,以便在大气探测中获得更高的时间分辨率。这对获取预测强雷暴发展过程的实时数据尤为重要。
同年,美国国家科学基金会(National Science Foundation,NSF)成立了合作自适应遥感大气工程技术研究中心,这是一个跨学科、涉及多所大学工程师、计算机科学家、气象学者和社会学家参与合作的机构,他们利用成本低廉、扫描迅速的双偏振相控阵雷达,获取较少为人探索的对流层低层资料,进行相关基础研究、新技术开发并部署样机,以加强现有的雷达系统。
2)气象雷达的工作原理
气象雷达的基本工作原理是通过目标对雷达波的反射情况来确定目标的位置和特性(图2-12)。如果目标物体的导电性能越好,则目标物体对雷达波的反射能力也就越强,反射的面积也越大,反射能量越高。若物体的几何尺寸和波长相差很大,则反射的能量将会变弱;如果目标物体反射面的直径可以和雷达波的波长相比拟,则反射的能量也会明显升高。目前用于气象探测雷达的工作频率一般多为200~10 000 MHz。

图2-12 气象雷达站
以多普勒雷达为例,其发射出的电磁波,遇到运动的目标,返回信号产生频率偏移,从而可导出目标物相对于雷达运动的径向速度。其基本公式如下:

式中,fD为多普勒频移或多普勒频率,它是由于目标物的径向运动而引起信号的频率变化。目标物的径向速度称为多普勒速度。
多普勒天气雷达除了测量回波信号的平均功率之外,还要对回波信号的场强E(t)做频谱分析;进行频谱分析可以得到以多普勒频率为函数的后向散射功率S(f),称为多普勒谱。在每个频率间隔Δf 内的回波功率,是运动速度相对于Δf 的降水粒子的回波功率之和。
利用式(2-1),S(f)可以变成S(v),称为降水粒子的径向速度谱。根据径向速度谱可以计算目标的平均多普勒速度v 和速度的方差σv2,从中可以进一步了解降水粒子的滴谱分布和降水粒子所在气层的大气湍流情况。具体应用如下:
(1)探测降水区中气流的垂直速度(平均值)。天线垂直指向天顶的多普勒雷达,可以测量降水粒子的平均多普勒速度v。由于多普勒速度v 是降水粒子降落末速度Wt和气流的垂直速度W 之和,即v=Wt+W,因此,若已知降水粒子在静止大气中的降落速度Wt,即可确定气流的垂直速度W。
(2)雨滴谱的测量。不同大小的降水粒子具有不同的降落末速度Wt,产生的回波功率也不同。利用垂直指向的多普勒雷达可以测定回波信号的多普勒谱。若已知气流的垂直速度W,则根据Wt=v-W,可以得到回波随降水粒子末速度Wt的分布。
(3)湍流的估计。多普勒谱的宽度可以用多普勒速度的方差σ2v来度量。多普勒谱的宽度由下列四个因素决定:降水粒子的末速度、空气的湍流谱、波束截面上风速的垂直切变和波束宽度的影响。
总的方差σ2v可以写成由上述四个因素产生的方差之和。因此,当多普勒雷达的波束宽度小于1°,并进行垂直指向探测时,σ2v则由降水粒子末速度的散布和被测体积中小尺度空气湍流的垂直分量引起。
若确定了第一个因子,则测定了σ2v就可以推算出空气的湍流情况。而尺度大于被测体积的湍流,即为平均多普勒速度v 的变化,可以用平均多普勒速度的时间变化代替空间变化来估计。
2.1.1.5 精密进近雷达
精密进近是指由仪表着陆系统或精密进近雷达提供精密的方位和下滑引导的仪表进近程序。相比之下,非精密进近仅提供方位引导(在一些图书中,方位引导又称水平引导,下滑引导又称垂直引导)。
常见的能够提供精密进近的设备有仪表着陆系统(instrument landing system,ILS)、微波着陆系统(microwave landing system,MLS)和精密进近雷达等。根据精密进近的定义,这些设备在飞机降高、减速或修正航迹等机动飞行时,在方向上要为飞机对准跑道中心线的延长线提供精确的方位信息;在垂直剖面(高度)上为保证飞机不偏离下滑道,提供精确的下滑信息。
一套ILS主要由两个子系统组成:一个提供水平引导(航向信标台;localizer,LOC),另一个提供垂直引导(下滑台;glide slope,GS或glide path)。通过两个子系统的配合,飞机准确降落在跑道上。而这个引导是由飞机上的ILS接收机对接收到的无线电信号的调制深度进行比较得到的。
ILS的航向信标台(LOC)给出与跑道中心线对准的航向面,其在跑道两端的信号范围与距离LOC的关系如图2-13所示。
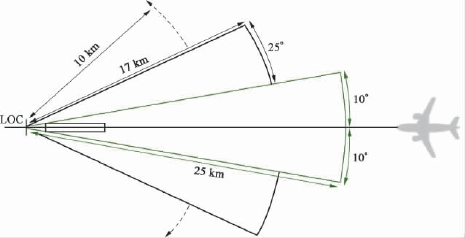
图2-13 信号范围与距离LOC关系图
精密进近雷达(图2-14)是由地面测定进近飞机位置的一次雷达,一般安装在跑道的一侧,面向进近飞机在20°扇区范围内发射左右扫描波束,同时在垂直屏幕的10°范围内发射上下扫描波束,一般作用距离为40~60 km。精密进近雷达一般装设在跑道附近,观测航空器相对规定下滑线的偏离,引导航空器进近、着陆,并向驾驶员提供飞机相对于跑道中心线的方位偏离、下滑偏离和对跑道入库的距离数据。

图2-14 精密进近雷达
依靠精密进近雷达,在低能见度进近时,可以由地面人员通过话音通信指挥飞机进入并保持在适当的下滑路线上完成进近着陆。这种进近引导方法被称为“地面控制进近”,一般用于没有仪表着陆系统的机场。然而,这种进近引导中驾驶员处于被动地位,对当前高速飞机已不太适用,因此民航已较少使用。
2.1.1.6 场面监视雷达
场面监视雷达是一种用于监视机场地面飞机与车辆的雷达,20世纪70年代以后逐步投入使用。场面监视雷达是中国航空机场内部必不可少的雷达监视设备之一,它作为一种用于监视机场中飞行区域(跑道及滑行道)的飞机及车辆等地面移动目标的雷达,帮助塔台和站坪的管制员借助场面监视雷达显示器清楚了解地面飞机和车辆的位置。国际上一些先进的大机场采用了场面监视雷达系统来监视机场的交通,这是场面监视管理技术的一次巨大进步。场面监视雷达从原理上就是一部一次雷达,工作原理和其他的近、远程一次航路雷达十分相似,都是利用雷达发射机按照一定的重复频率发射一个射频脉冲信号,该信号遇到目标后反射,接收机接收到反射信号后进行处理并计算出目标离雷达中心的距离,天线系统的方位编码器提供正北和方位信息,从而能够确定目标的位置。其输出信号送到场面监视数据融合系统,最后提供给塔台调度以及机场当局调度或站坪管理部门使用,进而提高机场的运行效率。由于场面监视雷达主要用于发现低空近地目标和机场场面的目标,因此场面监视雷达的天线仰角一般为负值,垂直波瓣图为倒余割平方波瓣特性。
场面监视雷达早期一般应用于海上的舰船、各种港口河道,主要目的是监视舰船等水面上的目标,用于港口的舰船调度,保证港口在各种复杂天气条件下舰船水上航行的安全等。后来随着雷达技术的发展和各个领域需求的不断增加,场面监视雷达逐步扩大了应用领域,如水库大坝的安全防护、海岸监视、重点军事设施区域监视、局部战区监视以及机场场面监视等。场面监视雷达按安装地点可分为舰载场面监视雷达、车载场面监视雷达、陆基场面监视雷达、机载和星载场面监视雷达等。
场面监视雷达的雷达数据处理系统具备一定的目标识别、冲突判断和告警功能。具体如下:
1)定位功能
该系统应及时为管制人员提供机场内部跑道、滑行道、停机桥、机坪以及其他部位等重点监视位置的信息,同时对现场内飞机、车辆、人员以及其他物体的位置、速度等进行定位捕捉,将信息进行传输,保证完成监视工作。
2)告警功能
该系统应能够对飞机跑道上飞机的动作、速度和方向等进行预判,并据此对是否发生碰撞进行分析,同时向管制人员发出告警信号,以降低危险的发生率。
3)自动识别功能
对机场内所有的飞机、车辆以及必要物品均安装并开启应答机,结合系统的自动识别功能对其标牌进行识别,并对飞机、车辆等进出以及场面具体情况进行24小时监视。
场面监视雷达设备根据其主要监视功能及部位可分为天空反馈系统、收发系统、雷达头信号接收系统、机场雷达信号监视系统、控制系统以及传输设备等。其中,天空反馈系统中包含的天线塔和天线控制单元(antenna control unit,ACU)可实现对天空中的信号进行监视和接收;收发系统则是场面监视雷达系统中接收、发送信号的关键部分,其主要分为2个收发柜;雷达头信号接收系统中包含4部收发机,主要对信号进行接收和发送,并对接收到的视频信号等进行进一步处理,同时对信号中的无用部分和噪声进行删除后将该处理过的信号传输给其他系统中,保证监视雷达系统的正常运行;机场雷达信号监视系统需要将接收到的视频信号在雷达头中显示,并通过系统对视频接收信号的程度以及各个模块的工作状态等进行分析,利用系统软件对雷达的运行参数进行适当调整与修改,保证信号接收的强度。