2.1.2 广播式自动相关监视设备
早期对飞机的监视,高交通密度区靠雷达监视,低交通密度区如边远区域或海洋只能靠驾驶员利用高频(high frequency,HF)无线电台通过电报或话音发送飞机位置报告。由于缺乏可靠的通信手段,因此除雷达监视以外,没有其他监视手段。
雷达监视是地面独立的对空监视,从一次雷达发展到二次雷达,从A/C模式发展到未来的S模式,已成为国际上普遍采用的技术。为了弥补远程边缘海洋监视之需,未来空中航行系统(future air navigation system,FANS)委员会认为,采用可靠空/地通信(如卫星通信)能够自动地、周期性地用数字式数据报告飞机位置,虽为非独立监视,但仍然是有效的监视技术,为此推荐了自动相关监视(ADS)技术。
国际民用航空组织(International Civil Aviation Organization,ICAO)将ADS技术定义为:“ADS是一种监视技术,由飞机将机上导航定位系统导出的数据通过数据链自动发送,这些数据至少包括飞机识别码、四维位置和所需附加数据。”ADS技术是基于卫星定位和地/空数据链通信的航空器运行监视技术,是为越洋飞行的航空器在无法进行雷达监视的情况下,希望利用卫星实施监视所提出的解决方案。中国在沿青藏高原飞行的欧亚航路上建立的L888航路即采用了ADS的监视方式。
ADS可以分为ADS-A(ADS-addressing,选址式)和ADS-C(ADS-contract,合约式)两种模式。ADS-A/C是指飞机与空管单位之间首先建立起点对点的通信链接,在建立起链接之后,根据约定,飞机上导航设备会自动地将飞机有关信息传输给空中交通管制部门,同时地面也可以向飞机发送上行信息。通信链接的方式可以是甚高频(very high frequency,VHF)数据链、高频(HF)数据链、二次雷达(SSR)S模式应答机、航空移动卫星业务(aeronautical mobile-satellite service,AMSS)通信等。飞机向下报告的信息通过地面网络传到空管中心,经过数据处理,飞机的位置等信息就可以显示在屏幕上。这种飞行员和管制员之间建立的数据链通信也称为管制员飞行员数据链通信系统(controller pilot data link communications,CPDLC)。ADS-A与ADS-C的区别在于,建立起地空链接后,触发飞机向下报告的方式不同。ADS-A是根据事先的约定来触发向下报告,这个约定可以是一定的时间间隔或经过每个航路点等自动下传;ADS-C是根据地面管制单位的询问来进行应答下传。
ADS是建立在地对空监视基础上的,20世纪80年代后期发展起来的空中交通警告与防撞系统(traffic alert and collision avoidance system,TCAS)是建立在空对空监视基础上的,而用于机场场面活动监视是地对地监视。随着技术的发展,开始将这三种技术结合成一体,使活动着的飞机(包括车辆)各自自发地广播自我位置,本机收到邻机位置报告后进行空对空相互监视,地面管制部门接收场面飞机和车辆的位置报告,能起到场面监视的作用。通过几年的试验,ICAO的ADS专家组认可并定名该技术为广播式自动相关监视(ADS-B)。
2.1.2.1 ADS-B设备概述
ADS-B系统由机载设备和地面站组成,机载设备又包括:全球定位系统(global positioning system,GPS)接收机,用于接收来自GPS的定位信息、确定自身位置;ADSB收发机和天线,用于发送自身位置信息和接收来自其他飞机的广播报文;驾驶舱交通信息显示器,用于报告邻近飞机的位置信息;地面站,用于接收广播报文供管制员监视和控制。ADS-B运行体系示意图如图2-15所示。

图2-15 ADS-B运行体系示意图
机载设备通过GPS来确定飞机的精确位置,然后将位置信息转换成数字码。数字码结合其他一些信息(如速度、高度、飞机转弯/爬升/下降率等),通过数据链从飞机广播出来,在150 n mile(1 n mile=1.852 km)高度内的其他飞机和地面站都能接收到数据链广播,并将其信息在屏幕上显示出来。地面站将接收到的飞机信息输入空管系统,提供给管制员进行“类雷达”的管制监视;空中的飞机接收到其他飞机的信息后,经过处理显示在驾驶舱交通信息显示器上。如果在机场内的车辆上安装该发射和接收设备,则机场的场面管制席还可以进行场面车辆监视;而机场内的车辆同样可以监视周围的飞机和车辆,防止跑道的非法侵入。
2.1.2.2 ADS-B设备分类
从应用平台来看,ADS-B产品包括地面站、机载、车载以及星载产品。其中,地面设备以ADS-B接收站为主;机载平台、车载平台都有比较成熟的ADS-B发射与接收产品;星载ADS-B产品主要是ADS-B接收机。这里重点关注机载ADS-B产品,其分类如图2-16所示。
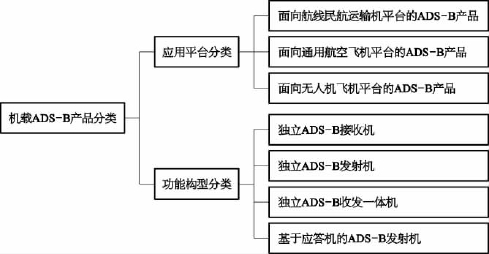
图2-16 机载ADS-B产品分类
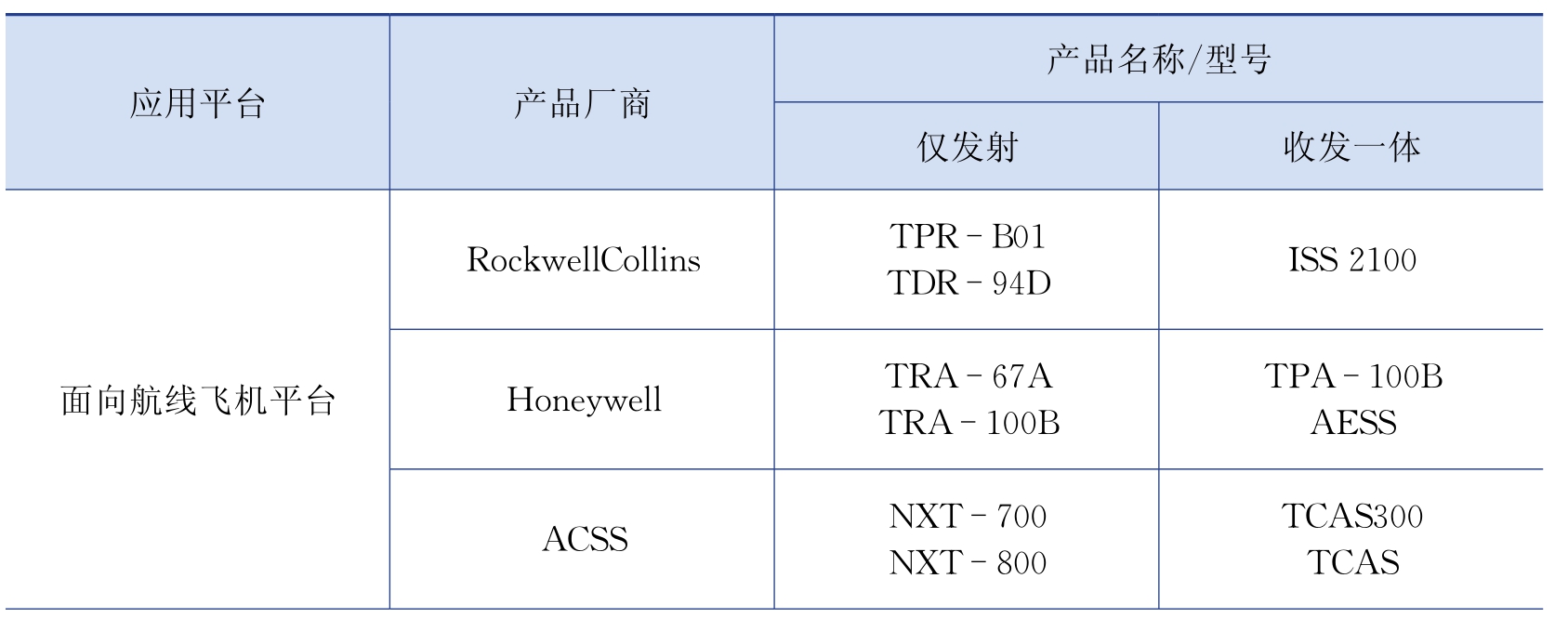
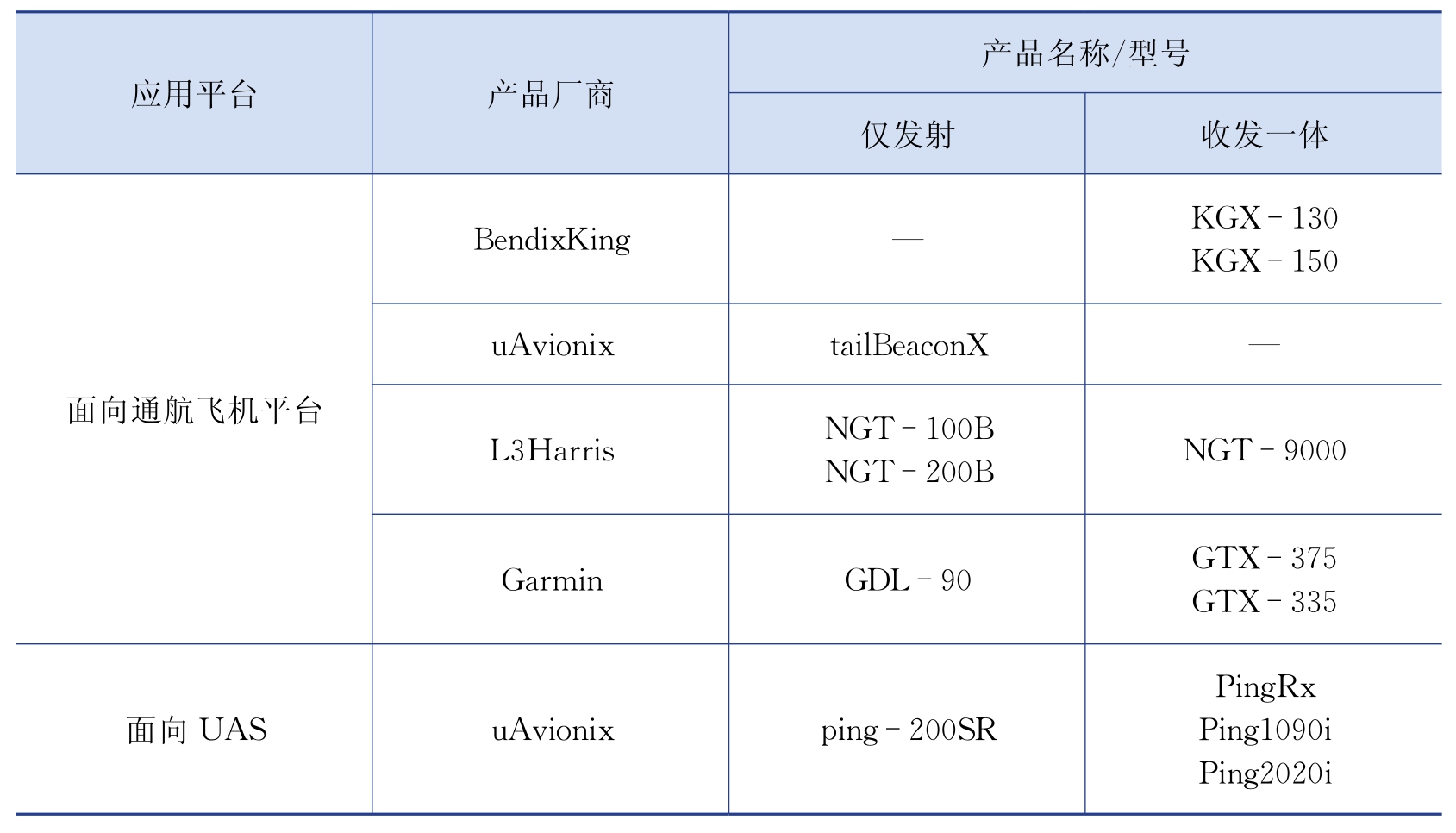
从图2-16可以看出:从应用平台来看,机载ADS-B产品可以粗略地分为面向航线飞机的ADS-B产品、面向通用航空飞机的ADS-B产品和面向低空目标的ADS-B产品;从功能构型视角来看,机载ADS-B产品又可以分为独立ADS-B接收机、ADS-B发射机、独立ADS-B收发一体机和基于应答机的ADS-B发射机。另外,分别从载机类型与功能构型两个视角对机载ADS-B产品进行分类,见表2-1。
表2-1 机载ADS-B主要产品
续 表
1)按载机平台分类
(1)面向航线飞机的ADS-B产品。目前,航线飞机的ADS-B相关产品大多被RockwellCollins、Honeywell、ACSS等主流供应商垄断。这些公司多通过对现有S模式应答机的升级来实现ADS-B发射功能;通过对交通告警和防撞系统(TCAS)进行升级实现ADS-B接收功能。具有ADS-B发射功能的主流产品有:Honeywell公司的TRA-100B应答机、RockwellCollins公司的TPR-901应答机和ACSS公司的NXT-600/700/800系列应答机。具有ADS-B接收功能的产品有Honeywell公司的AESS、ACSS公司的TCAS等,如图2-17所示。
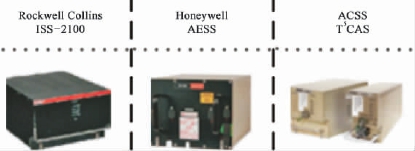
图2-17 三大国外厂商综合监视产品
(2)面向通用航空飞机的ADS-B产品。在通航领域,提供ADS-B产品与解决方案的厂商众多,包括L3Harris、FreeFlight、Bendix King、u Avionix、Garmin等。由于通航飞机种类多、应用场景多样,因此其产品功能构型也比较多,包括独立的接收机、发射机以及一体化收发机。具有代表性的产品有:Bendix King公司研制的KGX-130/150接收机;Garmin公司研制的GTX-335/375收发机,其价格仅2 295美元,市场竞争力极强;u Avionix公司研制的tailBeaconX发射机(图2-18);L3Harris公司研制的NGT-2000/2500、NGT-9000系列一体化收发机。其中,u Avionix公司研制的tailBeaconX发射机非常有特点,它集成了广域增强GPS接收机与航行灯,结构设计非常巧妙,可以方便地安装于飞机尾垂的航行灯位置,原位替换原航行灯。
(3)面向低空目标的ADS-B产品。在低空目标ADS-B产品领域,u Avionix公司推出了多款轻巧且集成度很高的ADS-B产品,包括ADS-B接收机PingRx、ADS-B发射机ping-200SR、ADS-B一体化收发机Ping2020i与Ping1090i等。其中,Ping1090i(图2-19)仅重26 g,支持1 090 MHz与978 MHz双频接收、1 090 MHz发射,集成了广域增强GPS接收机与气压高度表。

图2-18 面向通航的ADS-B发射产品tailBeaconX

图2-19 面向低空目标的ADS-B收发机Ping1090i
2)按功能构型分类
从功能构型来看,ADS-B产品可分为以下三类:
(1)ADS-B接收。独立的ADS-B接收机主要应用于通用航空与低空目标,大多支持1 090 MHz与978 MHz双频段接收,比较有代表性的产品包括Bendix King公司的KGX-130/150、Freelight公司的FDL-978-RX、u Avionix公司的plug USB接收机等。这些接收机十分轻巧、集成度高、价格便宜,可以通过无线网络与智能手机、平板电脑交联,信息可以在第三方软件上直观显示,只需很小的代价就可以极大地增强飞行员对周边交通态势的感知能力。
(2)ADS-B发射。ADS-B发射机按频段可以分为978 MHz与1 090 MHz两种:工作于978 MHz的ADS-B发射机主要面向美国通用航空飞机;工作于1 090 MHz的ADS-B发射机其应用范围较广。为了防止1090ES链路拥堵与干扰,独立的、不与应答机集成的ADS-B发射机类型与应用场景受到了约束。因此,主流的工作于1 090 MHz的ADS-B发射机大多与应答机集成。面向航线飞机的典型产品有TRA-100B、TPR-901和NXT-800等;面向通航飞机的产品有Bendix King公司研制的KT74应答机、Freelight公司研制的FDL-1090-TX等。面向通航飞机的ADS-B发射产品大多集成了广域增强GPS接收机、气压高度表等,安装方便且性价比高。
(3)ADS-B收发一体化机。该构型集成ADS-B的发射与接收功能,主要应用于通用航空与低空目标,集成广域增强GPS接收机与气压高度表,大多支持1 090 MHz与978 MHz双频接收;发射机一般都有多种配置,可工作于978 MHz或1 090 MHz。L3Harris公司针对通航飞机开发了NGT-9000多功能收发机,支持双频接收,可以获取交通、飞行与气象信息;发射机工作于1 090 MHz,与S模式应答机集成。u Avionix公司针对低空目标开发了Ping1090i与Ping2020i系列收发机,两者都支持1 090 MHz与978 MHz双频接收,其中,Ping2020i发射机工作于978 MHz,Ping1090i发射机工作于1 090 MHz频段。
2.1.2.3 ADS-B技术现状
ADS-B全称是automatic dependent surveillance-broadcast,中文含义是“广播式自动相关监视”,顾名思义,即无需人工操作或像二次雷达一样去询问,飞机会自动地将自己的位置、高度、速度、航向、识别号等信息向其他飞机或地面站广播,以供管制员及飞行员对飞机状态进行监控。如图2-20所示为ADS-B运行原理。
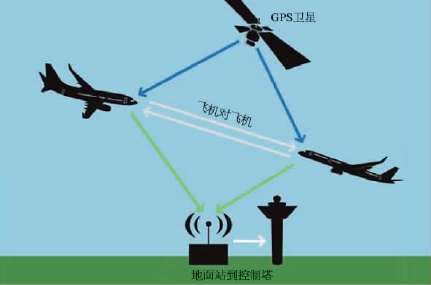
图2-20 ADS-B运行原理
ADS-B系统是一个集通信与监视于一体的信息系统,由信息源、信息传输通道、信息处理与显示三部分组成。ADS-B的主要信息包括飞机的位置、高度、速度、航向和识别号等,而这些信息全部来源于机载设备,如飞机的位置信息从机上GPS设备获得、飞机的高度从机上气压高度表获得;信息传输通道目前运用得较多的有VDL Mode4(甚高频数据链模式4)、UAT(万能电台数据链)和1090ES(1 090 MHz S模式扩展电文数据链),可以将它们类比为电信、联通和移动;信息通过信息传输通道自动地传到地面接收站或其他飞机,便可为相应用户所用(图2-21)。
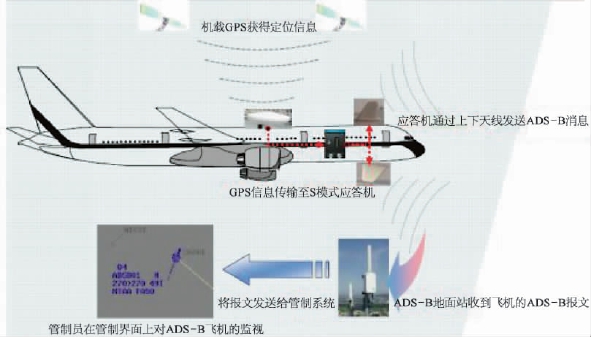
图2-21 ADS-B信息交互
ADS-B具有的特性,可体现为A(automatic)、D(dependent)和B(broadcasting),其中,A表明飞机各项信息的对外广播是由相关设备自动完成,而不需要飞行人员的介入;D表明实现飞机之间以及地面空管机构对空域状况的感知,需要所有飞机均参与到对各自信息的广播中,同时所发送的信息均依靠机载设备所提供的数据;B表明飞机所发送信息不仅是点对点地传送到空管监视部门,还要对外广播,使所有通信空域内的单位均能收到(图2-22)。
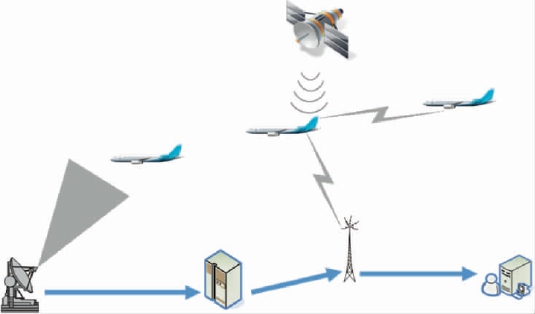
图2-22 ADS-B技术原理图
根据相对飞机的信息传递方向,机载ADS-B应用功能可以分为发送(OUT)和接收(IN)两类。
1)ADS-B OUT
ADS-B OUT是指飞机发送位置信息和其他信息。地面系统通过接收机载设备发送的ADS-B OUT信息,监视空中交通状况,起到类似于雷达的作用。ADS-B OUT基本功能如图2-23所示。
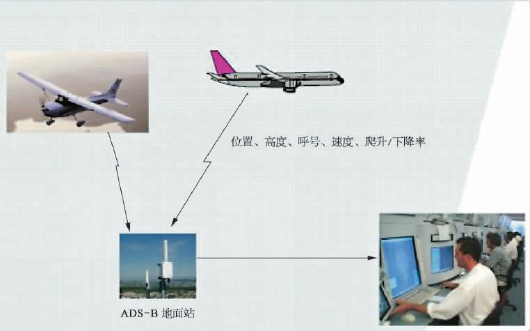
图2-23 ADS-B OUT功能示意图
2)ADS-B IN
ADS-B IN是指飞机接收其他飞机发送的ADS-B OUT信息或地面服务设备发送的信息,为机组提供运行支持(图2-24),这是实现ADS-B系统通信功能的基础。
ADS-B是目前最新的一种监视技术,其覆盖范围之大和接收信息之广是二次雷达所不可比的。通过对ADS-B系统的研究发现,它可以应用于地面雷达设备覆盖不到的内陆荒漠地区、无人值守区域以及偏远海洋区域,为飞机提高比较精确的航行服务信息,并且对目前使用的间隔标准提出了更高的要求;在有雷达覆盖的繁忙区域,可以提高航路和终端区的空域飞行流量;同时,利用ADS-B技术还可以在管制区域实现飞行动态的监视,不仅可以监视空中和地面上的飞机,还可以监视地面上运动的车辆,用以改进当前的飞行流量;应用ADS-B上行、下行报文的传送,还可以为飞行中的飞机提供其需要的各种服务,这一技术在空管上的应用将会对空中监视起到很大的推进作用。
ADS-B技术的实现是监视技术的一次飞跃,更是空管领域的一场深刻革命,在获得充足监视信息的基础上,各飞行单元即可自主实施航路选择、间隔保障、冲突发现与避免,而无需地面空管部门的介入。可见,ADS-B技术的实施,是实现空域管理由集中式向分布式过渡的必要支持,更是未来自由飞行理念实现的重要保证。
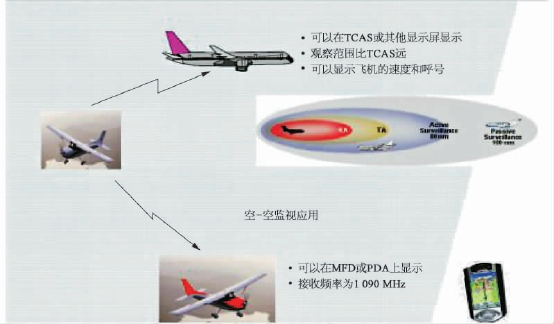
图2-24 ADS-B IN功能示意图
ADS-B技术在实施空-地监视时,还可以进行空-空监视即飞机之间的相互监视。与TCAS相比,因为ADS-B的报告利用数据链进行广播,所以飞机之间不需要发射询问信号就可以直接收到并处理飞机之间的飞行信息,因此可以有效提高飞机之间的避撞性能,以达到缩小飞机飞行间隔的目的。在这种情况下,实时广播以及实时监控是实现飞机“自由飞行”的必备条件。在目前的管制条件下,飞机都是按照地基导航系统飞行,也就是按照无数个无线电信标、雷达和信号发射塔建立的航线飞行。由于地形复杂,某些地方不适合建立上述这些系统,因此飞机不能选用最直接、最短的航路,而是经常要绕飞到同一个航线上,这样就造成航线拥挤和空域利用率低。自由飞行就是指飞机在自动化发展比较高级的时候,不依赖于地基设备,仅依靠空-空监视来告知飞行员如何选择航路飞行,同时还要保证信息的完整性和准确性。而已经开始应用的ADS-B技术,在以后的研究发展中,可以达到这样的要求。座舱综合信息显示器可以给飞行员提供其他飞机降落或起飞以及机场地面车辆的各种信息。
ADS-B技术还可以监视到机场地面上运动的汽车和滑行的飞机,可以以较低的成本实现飞机对场面的监视。虽然国内各个机场都装有场面监视雷达,但是由于场面监视雷达本身设计的缺陷,因此很难覆盖到机场的各个角落。应用ADS-B技术之后,再加上场面监视雷达的配合,就完全可以监视到机场的各个角落,实现对机场地面运动车辆和飞机的更准确监视和管理。
2.1.2.4 ADS-B信息类型
具有ADS-B功能的飞机可以对外广播各类所需监视信息,这些信息可分为以下几类。
1)标识号(identity document,ID)
ADS-B所传递的基本标识信息包括以下三种:
(1)呼号(call sign)。由7个字母数字组成,对于不接受ATS服务的飞机或车辆以及军用飞机,不需要此类信息。
(2)地址(address)。用以唯一标识飞机的24位地址。
(3)类型(category)。由国际民航组织定义的描述航空器类别的标识,如轻型机、中型机及滑翔机等。
2)状态矢量
状态矢量是移动目标的状态矢量,包括在全球统一参考系统下的三维位置和速度等信息。包括以下元素:
(1)三维位置。包括:在传输数据的格式上要求不损失精度、具备完好性;几何位置元素使用WGS-84坐标系。(https://www.daowen.com)
(2)三维速度。包括水平速度矢量和垂直速度,几何速度信息使用WGS-84坐标系。
(3)飞机转向标示。包括左转、右转、直飞。
(4)导航不确定度(navigation uncertain category,NUC)分类。根据ADS-B发送系统的NUC数据集进行划分,包括位置不确定度(NUCP)和速度不确定度(NUCR)。
3)状态和意图信息
状态和意图信息主要用于支持机场交通监视(airport traffic supervision,ATS)和空-空应用,包括:
(1)紧急/优先(emergency/priority)状态。用于标识紧急或优先级状态的相关信息,如非法侵入告警、油量供应不足等。
(2)当前意图(current intent)信息。当前需要发布的飞机意图状态,包括目标高度、所期望的航迹等。
(3)航路意图(trajectory change point,TCP)信息。提供航路发生改变的相关意图信息,如当前航路改变意图(TCP)信息、未来航路改变意图(TCP+1)信息。
4)分类号
分类号用于标识参与者支持特定服务类别的能力,如基于驾驶舱交通信息显示(CDTI)的交通显示能力、冲突避免和精密进近等。
5)其他种类信息
其他信息是指ADS-B技术能够传送实施监视一方所需要的任何信息,随着技术的发展和各种新应用的引入,将需要更多种类的监视信息,ADS-B技术将通过相应软硬件配置实现对任何所需信息的广播。
2.1.2.5 ADS-B特点
ADS-B设备采用全向广播方式播发空对空、空对地报告,由飞机自动向周围的飞机和地面站发射自身的位置等信息,实现了雷达监视无法达到的空-空相互监视,能够使机组和管制员以前所未有的精确度“看到”飞行冲突,有利于航空器主动避让交通冲突,对运输飞行或通用飞行都行之有效。同时,使用ADS-B技术在实施空-空相互监视时,只需机载电子设备接收机、数据链收发机及其天线、驾驶舱交通信息显示器,不需要任何地面辅助设备,即可完成相关功能。除了能够精确提供空-空相互监视、地-空监视外,与雷达相比,ADS-B设备无论在监视范围、监视精度、空域利用或运营成本等方面都具有突出的优势。
1)监视范围
ADS-B设备能够实现登机门对登机门监视服务,即从航空器在地面的第一个运动开始,直到返回地面和关闭发动机,贯穿所有飞行阶段,实现了空中监视与场面监视的完美融合。ADS-B设备还可以在没有安装雷达设备或雷达设备无法覆盖的偏远地区、海角、盲区和天线屏障区提供监视服务,加强单一雷达覆盖区域的ATC监视,也可作为SSR监视的备份监视系统,通过提供附加的位置报告作为雷达位置更新的补充。
2)监视精度
与雷达相比,ADS-B能够提供更高精度和抗干扰的监视,主要表现在:ADS-B数据每秒钟更新1次(雷达扫描间隔为4~15 s),测量偏移误差小于0.1 m,数据完整性小于1×107/h,而且探测航空器速度精度优于目前SSR所能达到的±10 m。
3)空域利用
与雷达监视下扇区划分和航路设计受雷达设备监视精度、可靠性的限制相比,ADSB设备监视能够提供更高效的航路监视、终端区监视和机场场面监视,减轻管制员工作负荷,从而改善空域扇区划分,优化航路结构,增强航空安全保障能力。
4)运营成本
1套雷达监视设备须投资100万~400万美元(包括选址建造、维护保养和电力等费用),在飞行流量小的地区安装会造成浪费。而1套ADS-B设备的投资只需要雷达设备的1/10,约10万~40万美元。此外,ADS-B设备还可用于对通用航空和军事飞行的精确监控,实现从地面到高空的全程覆盖,有力地促进低空空域开放,为实现低空自由飞行创造有利条件。
2.1.2.6 ADS-B应用
ADS-B信息可以应用于以下几个方面:
(1)为全国区域管制中心、中低空管制中心、进近、塔台等空管部门提供包括民航飞机、通用飞机、低空目标、场面车辆等实时的监视信息,实现ADS-B管制运行(图2-25)。
(2)为通用航空提供实时监视信息,提高通用航空的安全性。
(3)为机场运行控制系统提供机场区域及进港航班的动态信息,配合场面监视雷达,提高机场的运行控制能力。
(4)为航空公司提供全国航班的动态监视信息,提高航空公司对本公司航班运行动态的管理。

图2-25 ADS-B管制运行示意图
(5)为航空保障企业提供局部区域的航班实时动态监视信息,提高其服务保障能力。
(6)为民航局、管理局和监管局提供全国或局部区域的航班动态监视信息,提高政府监管水平。
(7)为相关公共服务系统提供全国、局部或特定航班动态监视信息,满足社会公众掌握航班信息的需求。
(8)为具备ADS-B IN功能的飞机提供航班动态信息,机组可以在驾驶舱交通信息显示(CDTI)设备上“看到”其他航空器的运行状况(图2-26)。

图2-26 CDTI观察到的飞行动态信息
2.1.2.7 ADS-B技术的优势和不足
1)ADS-B技术的优势
(1)运行成本低。ADS-B建设投资成本只有二次雷达的1/10左右,并且维护成本低,使用寿命长,无需人员值守,远程监控即可。沿海地区空管技术部门在雷雨季节到来之际,为避免雷达遭受雷击,都会申请关闭雷达,一旦雷达被雷击,其维修成本是非常高的;ADS-B则不存在这些问题。
(2)地面站建设简便灵活且不受地形限制。在某些因地形或地域无法建设雷达站的地方,如高原地区、沙漠地区及洋区等,可以通过设立ADS-B地面站实现对航空器的动态实时监视。
(3)定位精度高、更新率快。ADS-B定位精度高,因而对减小航空器的间隔标准、优化航路设置和提高空域容量等都具有积极作用。
(4)能够真正实现飞行信息共享。传统雷达监视技术所获信息一般只为特定部门使用,难以实现信息共享,遵循“空地一体化”和“全球可互用”的指导原则发展起来的ADSB技术,为飞行信息共享提供了现实可行性。
(5)加强空-地协同,与飞行中航空器的通信将更便捷。利用ADS-B IN 技术,可以通过ADS-B地面站向飞行中航空器提供各类情报服务,促进飞行安全,提高飞行品质。
(6)加强空-空协同,提高飞行中航空器之间的相互监视能力。如果说二次雷达是管制员的“眼睛”,那么随着ADS-B IN技术的推广使用,ADS-B将成为飞行员的“眼睛”,从而使保持飞行安全间隔的责任更多地向空中转移,这是未来实现“自由飞行”不可或缺的技术基础。
2)ADS-B技术的不足
(1)相关监视完全依赖机载导航信息源。ADS-B本身不具备对信息源的验证功能,如果航空器给出的位置信息有误,则地面站设备(系统)无法辨别;在全球导航卫星系统失效情况下,ADS-B不能正常工作。
(2)信息处理时间长,通信滞后。机上信息处理从数据采集到发送约需要60 ms,从机上通过数据链传输到地面约需要45~60 ms。
2.1.2.8 ADS-C设备简介
ADS-C实现对移动目标监视的原理,是通过数据链,将机载设备采集的移动目标的位置信息等发送到地面站,经过地面网络将数据转发到监视中心,监视中心对收到的点迹数据进行处理,形成航迹,以监视移动目标的运动。下面就与ADS-C的工作原理密切相关的ACARS的地空数据链通信协议与报文格式进行研讨。
1)ACARS
飞机通信寻址与报告系统(aircraft communication addressing and reporting system,ACARS)是一种在航空器与地面站之间通过无线电或卫星传输短消息(报文)的数字数据链系统。该协议于20世纪70年代被提出,当时称之为Telex。在数据链系统出现之前,地面人员和飞行人员之间的所有交流只能通过语音进行。这种通信以甚高频或高频语音无线电通信方式实现。20世纪90年代早期,卫星通信技术的引入使这种通信模式得到了进一步加强。
为了减少机组人员的工作负荷、提高数据的完整性,航空公司在20世纪80年代末引入飞机通信寻址与报告系统。有少数飞机通信寻址与报告系统在此之前就已经出现,但未在大型航空公司得到广泛的应用。虽然飞机通信寻址与报告系统通常出现在关于数据链设备(航空电子系统中的一种现场可更换单元)的叙述中,但此术语实际上是指完整的空中及地面系统。在飞机上,飞机通信寻址与报告系统由一个称为飞机通信寻址与报告系统管理单元(management unit,MU)的航电计算机和一个控制显示器单元(control display unit,CDU)组成。MU 用以发送和接收来自地面的甚高频无线电数字报文。在地面,飞机通信寻址与报告系统由网络构成,该网络有一个或多个无线电收发机,它可以接收(或发送)数据链消息,并将其分发到网络上的不同航空公司。
起初,飞机通信寻址与报告系统根据ARINC597标准设计。该系统在20世纪80年代末期升级以满足ARINC724标准。ARINC724定义了航空电子设备数字数据总线接口。该标准后来又被修订为ARINC724B。20世纪90年代所有的数字化飞机都采用了ARINC724B标准。这样,用于飞机通信寻址与报告系统管理单元的ARINC724B规范、用于飞行管理系统的ARINC739规范,以及用于打印机的ARINC740规范,就构成了一个协同工作的工业标准协议族。如今,工业领域又出现了新的ARINC 规范,其被称为ARINC758,它是为下一代飞机通信寻址与报告系统管理单元系统设计的。
2)OOOI状态(OOOI Status)
飞机通信寻址与报告系统的第一个应用是去自动检测和报告飞机在主要飞行阶段(推出登机门——out of the gate;离地——off the ground;着陆——on the ground;停靠登机门——into the gate,OOOI)的变化。这些OOOI事件是由飞机通信寻址与报告系统管理单元通过飞机上各种传感器(如舱门、停留刹车和起落架上的开关传感器)的输出信号来确认的。在每一飞行阶段的开始时刻,ACARS将一个数字报文发送到地面,其中包括飞行阶段名称、发生时刻,以及其他诸如燃油量或始发地和目的地。起初这些信息被用于航空公司的自动薪酬计算系统中,因为在这些公司里飞行人员的薪酬是与实际飞行挂钩的。除了上述功能外,飞机通信寻址与报告系统还增加了支持其他机载航电设备的新接口。20世纪80年代末期至90年代初期,在飞机通信寻址与报告系统和飞行管理系统之间的数据链接口出现。这个接口可以将地面发送到机载ACARS管理单元上的飞行计划和气象信息,然后转发到飞行管理系统(flight management systems,FMS)。这样,在飞行过程中航空公司就可以更新FMS中的数据,使得机组人员可以评估新的气象条件,或变更飞行计划。