2.3.4 风切变现象的影响
风切变定义为大气风场在速度或方向上的剧烈变化,是一种短时小尺度强辐散气象现象。它具有全向性,但一般探测方案考虑的是风的水平切变和风的垂直切变:前者为水平风分量(风速或风向)在水平方向的变化,它会使飞机水平风速发生变化(顺风或逆风);后者是水平风分量随垂直高度的变化,它会影响飞机在切变层升降时的飞行速度。此外,垂直风在水平或航迹方向上的变化——垂直风切变也会对飞机保持平稳飞行产生严重影响,下冲气流即垂直风切变的一种形式。风切变现象产生的原因主要分为两类:一类是大气运动本身的变化;另一类是地理、环境因素,具体天气因素有微下击爆流(micro-burst)、阵风锋(gust front)、湍流(turbulent)、射流(jet stream)、地形波(mountain wave)等。其中最主要的是存在雷暴、积雨云天气条件下的微爆和阵风锋,它们所产生的低空风切变(一般认为高度在600 m 以下)是影响飞机平稳起降的重要因素。
2.3.4.1 微爆
如图2-38所示为美国国家航空和航天局(NASA)对微爆的模拟图与微爆的结构示意图。雷暴云下小尺寸下击暴流下沉到地表后,将向水平方向爆出,产生相对下沉轴线近似对称的强辐散水平风,引起风切变。
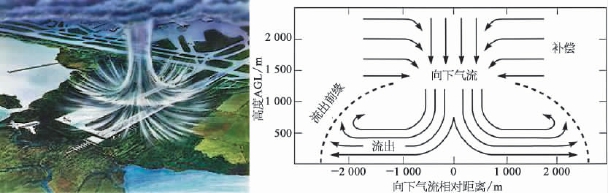
图2-38 微爆模拟与结构示意图
根据已有的观测资料分析,微爆具有如下特点:
(1)一般认为开始向水平方向爆出时微爆的直径大约为1 km,在不超过4 km 的直径范围内水平风速存在至少10 m/s的差异。根据现有的实测数据,微爆最大的径向速度不超过48 m/s。
(2)平均持续时间约为10~15 min,前一半时间内水平速度差异(dv)增加、直径(D)扩大但水平速度的变化率(dv/D)保持不变,而在后半段生命周期(消亡阶段)内水平速度差异减小而微爆的尺寸保持不变。
(3)最强的爆出一般发生在地表至200 m 高度范围内,而爆出深度(定义为爆出速度为最大爆出速度一半时的高度)一般介于200~600 m 范围内。
(4)微爆中心的反射率最高但水平速度最低,而爆出速度最大处反射率最低。
(5)在某些特殊的地理环境条件下,微爆的尺寸和持续时间可以大得多。如在高原,典型的微爆可以持续一个小时,形成直径为20 km 不对称的水平辐散。
(6)可分为湿微爆和干微爆两类,其形成机制有较大差别。湿微爆反射率因子范围介于10~75 dB之间,并且存在一个强反射率核;干微爆反射率较湿微爆小很多,因此干微爆不易探测。
(7)爆出相对于下沉的中心轴线不总是对称的。
1987年Merritt提出基于切变段提取的下击暴流探测算法。其基本思想是:由于下击暴流一般是空中雷暴云中强烈的下沉气流到达地面向四周辐散开来,从而会形成一个小尺度的强辐散气流。当多普勒雷达扫描到这一强辐散气流区时,便会显示出如图2-39所示沿径向多普勒速度由近及远逐步增大的特征(切变段)。该方法的基本步骤可概括为:先沿径向搜索满足速度差大于20 m/s的速度切变段;在搜索完同一仰角所有径向上的切变段后,将方位上相邻并满足一定条件的切变段合并为一个危险区域。如果危险区域的面积达到或超过一定阈值,则发布下击暴流危险区域的警报。
1994年,林肯实验室的Wolfson等提出了自动下击暴流风切变预报方法。该算法使用二维图像处理方法追踪单体的增长特征和消散特征,可以预警强度超过15.4 m/s的下击暴流,其具体的算法流程如图2-40所示。其中,数据预处理主要是将终端多普勒气象雷达(TDWR)观测到的反射率数据换成笛卡尔坐标内的数组,并填充缺少的数据,这些数据直接传给本算法的图像处理部分进行下击暴流先兆的分析。环境参数采用已有其他设备观测到的数据对大气温度和湿度廓线进行计算并传递给图像处理部分,以消除多个环境因素对雷达实际观测到的反射率的影响。图像处理是该算法的核心,主要是根据微爆演变过程中不同阶段(增长阶段、下沉阶段和过渡阶段)不同位置处液态水含量、反射率和多普勒的变化特征进行探测,按照一定的公式计算流出强度。
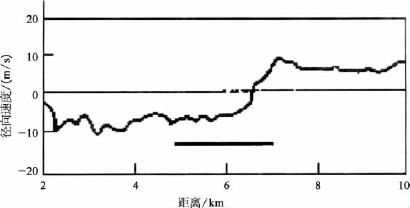
图2-39 切变段示意图
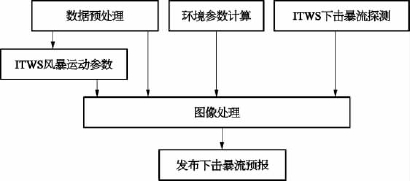
图2-40 自动下击暴流风切变预报算法流程
2004年,Smith等为WSR-88D雷达提出了一个专门用于监测和预警下击暴流的算法——灾害性下击暴流的预报和探测算法(damaging downburst prediction and detection algorithm,DDPDA)。DDPDA中包括了一个用于探测低空辐散特征的算法,该算法不具备预报能力,但可以探测已经发生的下击暴流。其探测低空辐散特征的步骤可以总结如下:首先,用一个3×3(3个距离库长乘以3个方位角)的中值滤波器平滑以减少径向速度的噪声;其次,对每个库长内切变的辐散分量ur和旋转分量us进行二维的最小二乘法计算,这个计算是在一个5×5的模板上得到的,所得的结果再次使用中值滤波以去除奇异点;然后,识别沿径向上连续库长的辐散分量ur超过一定阈值的段——辐散段,若认为是辐散段,还需要满足一定的长度阈值(1.5 km)并且位于单体中心的某个范围内(5 km);最后计算所有辐散段的最大速度差(ΔV)和径向风速的绝对值(|Vr|),如果满足|Vr|≥25 m/s或ΔV≥40 m/s,则说明已经存在强下击暴流。采用稍宽松一些的标准,则可以用于较弱下击暴流的探测和识别。
2.3.4.2 阵风锋
阵风锋结构示意图如图2-41所示。阵风锋是指在对流单体的成熟阶段,冷性下沉气流作为一股冷空气,在近地面的底层向外扩展,与单体运动前方的暖湿气流交汇而形成飑锋。其特点如下:
(1)阵风锋的体积范围较大,一般其垂直高度可超过地平线上1~3 km,水平宽度和长度分别可达1~3 km 和10 km 以上。
(2)由于阵风锋距离形成它的雷暴较远,因此其反射率较低。
(3)当飞机穿过阵风锋时将会受到向上的升力,其本身对飞机飞行的危害较低,但阵风锋后的湍流和长时间变化的风向(顺风和逆风)将会影响飞机飞行安全和跑道的正常使用。
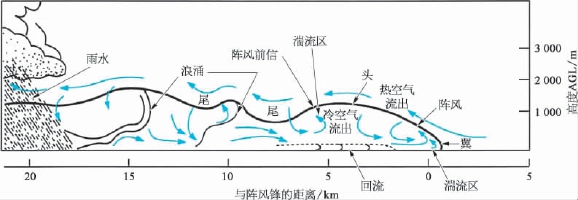
图2-41 阵风锋结构示意图
阵风锋探测算法与前述微爆识别算法有些类似。根据查找的资料并结合实际情况,比较合适的阵风锋探测和预报算法是美国TDWR所采用的阵风前检测算法(gust front detection algorithm,GFDA)和风移算法(wave-shift algorithm,WSA)。
1)GFDA
阵风前检测算法(GFDA)能够根据多普勒速度场,检测描述阵风锋特征的径向辐合线,从而定位和跟踪阵风锋。基本的GFDA 主要包括模式识别、特征提取、垂直关联、阵风锋表示和时间关联及预报等步骤。
(1)模式识别。图2-42所示为某一阵风锋速度数据的径向特性。该算法首先用9点的滑动平均对距离上的径向速度数据进行平滑,从而进行模式识别;然后沿着径向去搜索平滑后的速度数据,查找速度减小的特征(径向辐合),将之确定为“切变段”。由于沿距离平滑后的径向速度数据总是有大量的点到点的起伏,因此当搜索辐合特征时,采用7点的预测程序,将某一距离单元速度值和较它更远的7个相邻距离单元速度进行比较(图2-43)。该算法选择7个点的径向速度中数值上最接近但小于或等于有疑问的速度为“可接受的径向速度”,图中标记的两个7点滑窗分别选择后续第4个和第6个距离单元的速度值为“可接受的径向速度”。以此方法,后续的迭代将该“可接受的径向速度”和后续7个距离单元上的速度值相比较。如果在距离上存在7个连续的点径向速度增加的情况,则该切变段终止。(https://www.daowen.com)
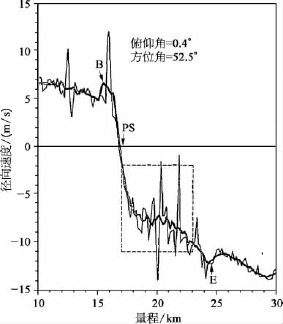
图2-42 径向速度随方位变化
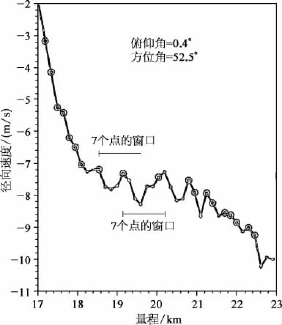
图2-43 切变段速度特征切变段
将峰值径向切变(定义为切变段内近似1 km 距离上的最大切变)、切变段开始与结束间的速度差别(ΔV)和各自的最小门限分别比较,以确定该切变段是否被保存。推荐的门限值分别为2.0 m/s和5 m/s。这些值的选择使产生稳定风移的阵风锋检测概率最大化,同时保持低的虚警概率。
需要说明的是,ΔV 的值不是切变段内最大和最小速度的差别。根据前述预测程序的原理,切变段开始和结束的位置一般不与最大和最小速度的位置相关(如图2-41中的“E”)。这一现象看似很奇怪,却在算法测试中有用。另外,测试结果说明,当某一切变段的峰值大于从切变段开始于结束时的速度差异ΔV 时,则该切变段通常是由于数据受到点目标或地杂波污染有关。因此,这些切变段应被忽略。
(2)特征提取。在实际的气象条件下,按照上述模式识别算法,一次仰角扫描中出现200个或更多有效的切变段也是常见的。将单一切变段按照它们峰值切变位置的空间近似(方位和径向)综合成普通特征。如果任何一个特征中少于5个切变段,该特征应被忽略。还有,如果特征的长度(定义为特征端点之间的距离)少于门限长度(5 km)时,特征也将被忽略。
为了对检测到的特征进行有效性检查,用户可选择将特征抑制窗激活。这些特征抑制窗最初被用于消除被残留地杂波污染区域探测到的连续错误的特征,那些质心位于特定窗内的特征则将被忽略。特征质心是指组成特征的所有切变段的峰值切变的平均位置。当完成这些有效性检查时,非常近似的特征被组合在一起。
(3)垂直关联。Witt和Smith发现,当GFDA 中使用特征垂直关联时,算法的错误检测将会大幅减少。因此,TDWR的初始GFDA 采用两个低仰角扫描(典型值为0.5°和1°),以确定是否存在阵风锋。
为满足不同的仰角扫描中检测到两种特征用于垂直相关,要求其中一个特征的质心在另一个特征的“垂直连续框”中。其中垂直连续框是通过在特征端点之间的连线两边5 km 处各画一条线,然后移动该框直到框的中心对准特征的质心,如图2-44所示。不同仰角上扫描得到的特征均应作垂直连续框。高仰角扫描得到的特征的质心进入低仰角扫描得到的特征的框中则可建立垂直关联,反之亦然。当其中有两个或更多的特征垂直关联且其中至少有一个特征长于10 km 时,则它们的切变段组合在一起形成检测到的阵风锋。
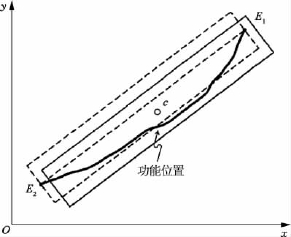
图2-44 垂直关联示意图
然而,有两种情况下单一的特征不满足上述标准,也可以被认为是检测到阵风锋:①如果一个特征没有垂直连续性,当它长于指定的长度门限(目前15 km)并且是那些不垂直相关的特征中最长时可以被认为是阵风锋,这使得能够探测长距离的浅阵风锋。②如果在距雷达10 km范围内低仰角扫描未检测到阵风锋,但在高仰角检测到10 km内有大于最小的门限锋长度的特征,可将其认为是检测到了阵风锋。这有助于算法在最低仰角扫描时消除地杂波污染的数据和显著的波束遮挡效应,从而检测到该区域的阵风锋。
(4)阵风锋表示。为了更好地显示和跟踪阵风锋,每一个检测到的锋被表示为高阶的多项式。所有组成某一特定锋垂直关联特征的切变段被用于估计多项式的系数。通过最小二乘的方法,如果被探测到的阵风锋的长度超过20 km,将使用一个五阶的多项式去描述阵风锋的位置。该算法采用一个三阶的多项式去描述长度小于或等于20 km 的阵风锋:
式中,有下标的常数为多项式系数;(x,y)为笛卡尔坐标对,该坐标系是以连接阵风锋端点、平行于x 轴而y 轴通过质心所构成的局部坐标系统。一旦该锋被描述为一个合适的多项式,其长度就以端点之间的路径长度计算。多项式拟合提供了一条相对平滑的曲线,总体上较好地表示了峰值切变真正的位置。
(5)风切变威胁。为了估计飞机穿过阵风锋可能经历的风切变威胁,计算了阵风锋中1 km 峰值切变值的平均值和一阶标准差。从经验来看,这个值相对来说是飞行员所经历切变的典型值。不采用最大的峰值切变值是因为,如果数据预处理失败则该值是非典型的。
(6)阵风锋的时间关联和预测。如果两次相邻的雷达空间扫描发现了一个或多个阵风锋,则应尝试对这些检测到的阵风锋进行时间关联。如果两个锋的质心间距在10 km距离门限内则将它们进行时间关联,这等效于在空间扫描更新率为5 min时探测到阵风锋的传播速度为33.3 m/s。阵风锋的质心为垂直关联特征中所有切变段位置的平均值,如果存在超过一个时间关联,则该算法选择质心最接近的作为关联结果。
与垂直关联和时间关联技术相似,算法的预测技术依赖于质心去确定阵风锋移动的方向和速度。当确定两次检测到的锋时间关联之后,计算质心到质心移动分量在与当前扫描得到的阵风锋端点间连线相垂直方向上的投影,用于阵风锋传播矢量的计算。采用均匀风速和风向的假设,这个矢量被用于解释当前锋面位置指向。若尝试用质心到质心跟踪的完全传播矢量预测阵风锋的位置,而不是其法线分量,则经常会产生较大的预测误差。这些大的误差一般发生在探测到的长度在空间扫描期间变化明显的情况下,会得到阵风锋在与它指向平行方向上的距离移动预测结果。
2)WSA
风移算法(WSA)用于估计紧跟在阵风锋后的风速和风向。采用阵风锋后一个扇区的径向速度数据可以提供风估计,对于每一个检测到的阵风锋,定义了两个空间扇区,从中选择径向速度数据。阵风锋传播矢量接着将用于确定哪一个数据扇区在锋后面(图2-45)。
对于每一个阵风锋数据扇区可以获取水平风的两种估计:第一种估计假设在特定的扇区中是均匀水平风场(均匀风模型),方位宽度下限为30°的扇区采用这一模型可以减少估计方差。第二种技术限制水平风方向与阵风锋指向角相垂直(垂直风模型),对于方位范围小于30°的锋,水平风估计总是从垂直风模型获得。
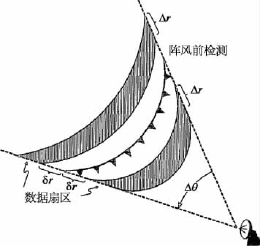
图2-45 阵风锋数据扇区示意图
对于均匀风模型,水平风分量(u0,v0)和径向速度vr有如下关系:
式中,θ为从北开始计算的方位角;φ 为雷达的俯仰角;ε 为由于多普勒速度测量不定以及实际风分量不由该式前两项决定而引入的未知误差。风分量![]() ,
,![]() )通过对每一个扇区中的径向速度退化到函数sinθ和cosθ,并且使平方误差和最小来估计得到。因为这里考虑的俯仰角cosφ 约为1(φ 很小),所以式(2-8)中与俯仰相关的项可被忽略。
)通过对每一个扇区中的径向速度退化到函数sinθ和cosθ,并且使平方误差和最小来估计得到。因为这里考虑的俯仰角cosφ 约为1(φ 很小),所以式(2-8)中与俯仰相关的项可被忽略。
对于垂直风场模型,多普勒速度vr和水平风速|V|的关系如下:
式中,ψ 为雷达方位和与阵风锋指向垂直的角度之间的差角。采用线性回归技术,阵风锋后的风速估计|V|由下式给出:
式(2-10)中的求和是对特定空间扇区内的N 个数据点进行的。因此,从最小二乘意义上来说,风速估计是垂直于锋指向的风分量的加权平均。
对于最小二乘和加权平均这两种技术,在对径向速度数据进行初始的最小二乘拟合之后,如果单个点不在拟合得到结果的两倍均方根误差范围内,则这些点将被抑制掉。在初步通过去除范围外的点之后,重复该程序。这种双次拟合抑制方法可能会造成水平风估计数据质量异常。均方根误差值除了用于对范围外的点进行抑制外,还被用于确定风估计的质量。如果在第二次拟合之后,均方根误差值大于3 m/s,则风估计将被抑制。
阵风锋跟踪和指向信息被用于确定阵风锋哪面是流出面(后面),同时也为水平风估计提供质量控制。阵风锋后风场明显不均匀和/或数据预处理失败,可能会造成错误的风估计。因此,如果风向估计和阵风锋的指向差异小于自适应的门限值25°(即风向与阵风锋指向接近平行),则该风估计将被抑制掉。长的或短的阵风锋(方位范围小于30°)风向估计也采用阵风锋传播方向进行核查。与传播方向相反的分量估计和幅度很大(大于40 m/s)的估计将被抑制。对于该算法生成的空间平均估计,风估计大于40 m/s被认为是数据预处理产生的误差(数据段中速度去混叠误差或残留的距离遮挡数据)。由于采用均匀风场模型进行风估计,在这些有效性检查中失败,可用垂直风场模型估计代替。因为垂直风场模型估计也受这些有效性检查的限制,所以有时采用WSA 没有风估计生成。