4.1.1 低空探测雷达设备发展趋势
近年来,空中威胁的种类日益增多,威胁的范围也从无人飞行器发展到巡航导弹,从隐身飞机发展到了战术弹道导弹。这些威胁对传统方式配置的一体化防空系统提出了严峻的挑战,使其生存能力受到了很大的威胁。此外,雷达探测低空目标时,由于各种背景杂波的反射信号很强,使得入侵目标的反射信号淹没在杂波中而难于发现,加上地球曲率的影响,雷达的低空探测距离大大缩短。由于预警时间很短,因此低空突防武器入侵的威胁就更大。
自第二次世界大战以来,低空、超低空突防一直是战争中进攻方的主要手段之一。中东战争中以色列轰炸苏伊士运河大桥、叙利亚导弹基地,英阿马岛之战中阿根廷“飞鱼”导弹击沉英国现代化驱逐舰和大型运输船等都是低空、超低空突防成功的范例。因此,各国都在积极研究和发展自己的低空雷达,以提高雷达网和防空系统对低空、超低空目标的探测、跟踪、识别和反击能力。
低空/超低空是指地表面之上300 m 以下的空间。从军事上来说,利用低空/超低空突防具有如下优势:低空/超低空空域是大多数雷达探测的盲区;低空/超低空是现代防空火力最薄弱的空域。西方军事专家认为,目前飞机和巡航导弹低空突防的最佳高度为海上15 m、平原地区30 m、丘陵和山地120 m。例如,美国的B-1轰炸机的突防高度为30 m、速度为1 Ma。就保证突防成功而言,降低飞行高度比增加飞行速度更有利于提高飞行器的生存概率。
4.1.1.1 低空探测雷达设备的发展现状
1)低空探测雷达受到的限制因素和影响
在现代战争中,雷达探测低空/超低空突防武器时会受到以下因素的限制和影响:
(1)强表面杂波。要探测低空目标,雷达势必会接收到强地面/海面反射的背景杂波,这是与目标回波处于相同雷达分辨单元的表面反射波。为了探测巡航导弹和雷达截面积小的飞行目标,必须要求很高的杂波中可见度。杂波中可见度是一个描述脉冲多普勒雷达或动目标显示雷达检测地杂波中目标能力的一个品质系数。
(2)地球曲率。地球是一个球体,直线传播的雷达电波只能在一定的视距范围内才能发现目标,即飞行目标只有高于“雷达水平线”飞行时才会被发现,反之则不会。
(3)地形多径效应。雷达电磁波的直射波、地面反射波和目标反射波的组合会产生多径干涉效应,导致仰角上波束分裂;而且在低高度上,这种效应会导致目标回波按R-8(而不是自由空间中通常的R-4)规律衰减。多径效应与平坦地形的特性有关,而地形遮挡效应则发生在起伏地形状态。
(4)地形、地物遮挡。在多山和丘陵地带,当雷达发射的电磁波遇到山脉、丘陵和森林等障碍物时,障碍物会对雷达形成屏蔽作用,造成地物干扰和盲区。地形、地物造成的雷达天线遮蔽角大大缩短了雷达对低空目标的有效探测距离。
2)国外低空监视雷达的发展现状
面对低空突防武器所带来的威胁,常规雷达已表现得力不从心。为了有效地对付低空、超低空突防武器的突然入侵,多年来各国投入大量人力和物力成功研制了各种先进的地面低空监视雷达,亦称低空补盲雷达系统。西方各国近年来在原有的基础上又派生、发展和研制出了多种新的低空监视雷达。
法国Thmson-CSF公司率先在其Tiger低空雷达的基础上,派生研制出了TRS2105和TRS2106机动式雷达。这两种雷达均工作在G波段,采用相干发射、频率捷变、脉冲压缩、动目标指示、恒虚警率技术的工作方式。两者均具有很高的抗电子干扰性能并装有一个处理装置,该处理装置的特点是:使雷达能很好地适应环境并自动预定和跟踪本地目标。
TRS2105(图4-1)安装在一辆两轴拖车上的方舱中。该方舱上架设了一个可折叠的8 m 天线杆,支撑一部3 m×1.6 m 天线。该雷达工作在G波段(550 MHz),峰值功率为70 kW,平均功率为1 kW,作用距离65/100 km,天线转速5.5~11 r/min,能自动跟踪60个目标。为了提高雷达的作用距离,天线架设到了8 m 的高度。
TRS2106雷达是TRS2105雷达的变型,特别适用于战场作战,其工作频率50 MHz、作用距离50 km、峰值功率8 kW、平均功率250 W、水平波束宽度1.7°。该雷达采用转速为30 r/min的平面阵天线,能自动跟踪90个目标。

图4-1 TRS2015雷达
目前,法国又研制成功了三坐标低空监视雷达RAC和FLIR。RAC雷达(图4-2)工作在G/H波段(4~8 GHz),提供了作用距离在100 km 范围内大气层衰减、发射功率、分辨率和天线尺寸与小目标(如在严重杂波环境中超低空飞行的小目标)探测间的最佳折中。RAC采用了一种现代化的超低副辨平面相控阵天线,运用了数字脉压和动目标检测等先进技术,具有很强的抗干扰能力。它的作用距离可达100 km,可探测速度为900 m/s的目标,距离精度为15 m,方位/仰角精度小于5 mrad。

图4-2 RAC雷达
德国AEG-Telefunken公司研制了TRM-3D和TRM-L低空监视雷达(图4-3)。TRM-L有2D型和3D型两种。该系统采用了发射频率捷变、脉冲重复频率捷变、极化捷变和脉冲压缩及脉冲相位编码等技术,因而具有高抗电子干扰性能。它通过先进的信号处理方法实现对反辐射导弹和低空飞机的高概率探测,一条附加通道保证了对直升机的可靠探测,天线综合了副瓣抑制和敌我识别功能,可架设到12 m 高。该雷达的消耗功率为38 kW,对雷达截面3 m2目标的作用距离是60 km,探测概率80%;对雷达截面1 m2目标的作用距离是46 km,探测概率80%;数据更新时间按工作方式的不同取2~4 s。
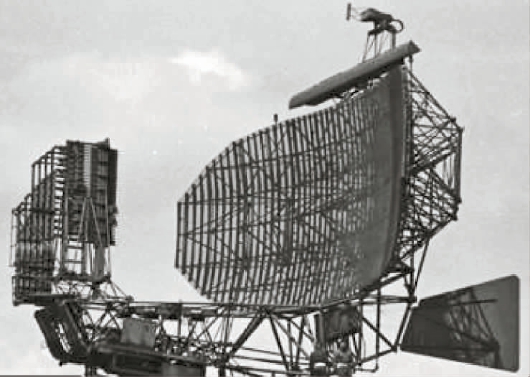
图4-3 德国TRM-L雷达
美国雷声公司目前新研制了机动式雷达MRSR(图4-4),ITT-Gilfillan公司正在研制全固态相控阵低空补盲雷达STAR。MRSR是一种高机动、3D、多功能监视雷达,工作在I/J频段,方位机扫,仰角采用相控阵扫描,可以捕获和跟踪方位360°上所有战术高度上的低空目标。该雷达采用了低噪声固态发射机和超低副瓣天线以及低截获概率波形等先进技术,使雷达能够探测和跟踪现代战场环境中低空突防的目标。MRSR具有良好的抗干扰能力,由于它的多波束工作特点,因而还有诱骗反辐射导弹寻的器的功能。该雷达机动灵活、操作简单,整个系统装在一个车厢里,只需一个人即可操作。

图4-4 MRSR雷达

图4-5 瑞典“长颈鹿”雷达
瑞典的“长颈鹿”系列雷达是典型的低空监视雷达(图4-5),该系列雷达的天线均被架高,主要用于对付低空威胁。瑞典Ericsson公司于20世纪50年代末开始研制脉冲多普勒雷达系统,“长颈鹿”基本型雷达最初是为瑞典陆军RBS-70近程SAM 系统设计的。该雷达于1978年开始生产,命名为PS-70/R,出口名称为Bofors。随着新的战术思想的发展以及武装直升机的广泛应用,该公司不断改进“长颈鹿”雷达,于1988年3月开始在基本型雷达的基础上推出了“长颈鹿”雷达系列,使其从搜索雷达发展成为具有指挥控制功能的C3I系统。该系列包括6种型号的雷达:“长颈鹿”40型、“长颈鹿”50AT型、“长颈鹿”75型以及“长颈鹿”100型、“长颈鹿”3D型和舰载型“长颈鹿”。该类雷达的主要用途是对付空中威胁,尤其是对付严重的杂波干扰环境和严重的电磁干扰情况下的超低空目标。
综上所述,低空监视雷达的主要特点如下:
(1)反地杂波性能强,一般都采用先进的动目标检测技术。(https://www.daowen.com)
(2)机动能力强,可以用多种方式快速部署。
(3)抗干扰性能强,采用包括宽带、捷变频、低副瓣等多种技术来提高抗干扰能力。
(4)高可靠性、高可维护性,保证雷达能在各种环境下可靠地工作。
(5)具有组网能力,低空雷达通常有较强的通信传输能力,可将获取的目标数据及时传输给友邻雷达及指挥控制系统。
4.1.1.2 雷达对低空进行监视的主要措施
雷达对低空进行监视措施归纳起来有两大类:一为技术措施,主要是提高雷达自身的性能,采用各种先进的反杂波技术;二为战术措施,主要是指物理上的反遮挡手段。因此,要实现雷达低空空域监视的目的,主要可采取如下方法:
1)研制天波超视距雷达和地波超视距雷达
天波超视距雷达克服了地球曲率的影响,比普通微波雷达的探测距离要大5~10倍。例如,美国东海岸的天波超视距雷达的探测距离达到了3 000 km,这种雷达是通过电离层折射将电磁波辐射到目标上的,因而进行的是俯视探测,这样低空目标就难于利用地形遮挡逃脱雷达对它的探测。地波超视距雷达发射的电磁波以绕射方式沿地面(或海面)传播,它不仅能探测地面和海面上的目标,还能监视低空和掠海飞行的目标。英国马可尼公司研制的实验型地波超视距雷达工作频率为4~8 GHz,能探测跟踪远距离低空快速飞行的目标。该公司研制的新一代天波超视距雷达的对空探测性能又有所突破,对大飞机的探测距离为300 km,对巡航导弹的探测距离为150 km。
2)通过提高雷达平台高度,来增加雷达水平视距、延长预警时间
目前提高雷达平台的方法有三种。一是采用机载预警雷达:在近几次的局部战争中(如阿富汗战争、中东战争),都使用了E-2C、E-3A、E-8C等预警机进行空中预警监视,由于不受地球曲率限制和机动灵活的特点,因此其具备很好的超低空探测性能。据计算,一架预警机的工作效率相当于2~3个地面雷达团。然而,预警机的技术难度大,价格昂贵,因而许多国家都难负担得起。二是采用系留气球载雷达:这种雷达探测距离远、技术较简单、价格经济,不失为一种较好的低空探测手段。美国研制生产的LASS气球载低空监视系统由高空系留气球MARK7-S和AN/TPS-63(V)雷达两部分组成,主要用于低空/超低空监视和海岸警戒。三是架高低空雷达的天线:典型的例子如瑞典的“长颈鹿”雷达系列。提高天线高度可增大雷达视距、减小盲区,但提高天线高度也受到许多技术条件的限制,高度不能无限地升高,一般最高可升至十几米。
3)雷达组网,发挥雷达群体优势来对付低空突防飞行目标
单部雷达的视野是有限的,难以完全解决地形遮挡所带来的影响,况且在实战中往往又是多种对抗手段同时施展的。因此,解决低空目标探测问题的最有效方案是部署既有地面低空探测雷达,又有各种空中平台监视系统的灵活而有效的多层次、多体制雷达,由其组成立体复合探测网,通过数据融合将各传感器的数据加以充分利用,从而实现全面的低空/超低空覆盖。
4.1.1.3 低空探测雷达的发展方向
雷达反低空/超低空突防的措施有多种。然而,低空雷达作为反低空突防的主力军也在飞速发展,从低空雷达的研制过程中可以看出低空雷达正在朝着以下方向发展:
1)发展采用新技术的新体制雷达
随着作战环境的日益恶化,低空雷达已由原来主要采用两坐标体制朝三坐标体制发展,并将平面阵列天线、相控阵、先进的信号处理技术、频率分集、脉冲压缩、频率捷变、边搜索边跟踪、AMTI和脉冲多普勒等复杂技术用于低空雷达,从而使低空雷达自身具备了较好的探测性能和反杂波性能。
2)架高雷达天线
架高低空雷达的天线是提高其作用距离的一种经济实用且有效的方法。采用各种架高天线技术以使雷达可在公路上、树林中或建筑物群内工作,而且雷达的架设时间也越来越短,即由原来的半小时左右缩短到了几分钟或边伸缩边工作。
3)提高低空雷达的机动性
低空雷达大多是战场监视雷达,主要为地面部队部署和转移提供防空警戒。在战场形势瞬息万变的现代战争中,雷达的机动性是其生存能力的关键要素之一。目前,机动式战场雷达已普遍使用,为了提高机动性,标准配置通常是把雷达安装在能适应各种地形的车上。随着先进技术的不断引入,有可能获得更完善的雷达性能及小而轻的元器件,这将使未来新系统设计或老系统升级更便于考虑机动性。
4)加强低空雷达自身的C4I功能
雷达组网技术是反低空突防的重要手段之一,用诱饵、导弹或火炮来保护主要雷达网的多层防御是地面防空系统的发展趋势。但问题是:如何深化防御,需要用多少设施来保护传感器?而且随着系统的深度与复杂性不断增长,出现了运行系统的软件设计问题,越来越多的证据表明,提高了系统的复杂性也就增加了系统的易受攻击性。
5)光电探测(可见光、激光、红外)和雷达探测
在光电探测方面,美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DARPA)一直在进行“先进宽视场图像重建与开发”(AWARE)项目的研究工作。2012年,DARPA 在美国海军研究实验室成功测试了10亿级像素的宽视场高清摄像机,DARPA计划通过AWARE 项目最终将摄像机的像素提高到100亿~500亿。目前AWARE-2和AWARE-10摄像机的视场角为120°×70°和100°×60°,基本解决了大视场和高分辨率的矛盾,可实现对“低慢小”航空器的有效探测。2015年底,美国诺斯罗普·格鲁曼公司在美国陆军举行的MFIX试验中,验证了名为“毒液”的反低空目标系统。“毒液”是一种地面定位系统,集成了诺斯罗普·格鲁曼公司历经战争检验的轻型激光指示/测距仪(lightweight laser designator and rangefinder,LLDR),能在昼夜及模糊可视环境下识别、锁定、跟踪低飞的小型低空目标。