6.1.5 肌电图
6.1.5.1 参数定义
利用DASYLab8.0软件的功能模块对肌电图信号进行分析,使用四阶巴特沃斯滤波器的带通滤波,截止频率为10~400Hz。选取胫骨前肌、腓肠肌外侧头、股直肌和股二头肌的触地前激活阶段(-50ms)、触地后激活阶段(+50ms)和缓冲阶段的肌电振幅(EMGRMS)。
肌电振幅表达式如下:

6.1.5.2 比较结果
如图6-5所示,为不同着陆方式下触地前激活阶段、触地后激活阶段和缓冲阶段肌电振幅比较。肌电触地前激活阶段,主动着陆时的肌电振幅相比被动着陆时,除胫骨前肌(30cm),股直肌和股二头肌(45cm)没有差异外,其余主动着陆反跳的肌电振幅均显著性大于被动着陆时(P<0.05)。触底后激活阶段,主动着陆时的肌电振幅均显著大于被动着陆时,除了45cm高度着陆的腓肠肌外侧头和股二头肌的(45cm和60cm)没有明显变化。缓冲阶段,30cm高度着陆条件下,主动着陆时的肌电振幅均显著大于被动着陆时。胫骨前肌和股二头肌在45cm高度着陆条件下,主动着陆时相比被动着陆时没有明显增减,胫骨前肌在60cm高度着陆条件下,肌电振幅也没有明显变化。
6.1.5.3 肌肉活化
肌肉活化程度可以反映出软组织的力学特性。通过肌肉活化的模式,能够观察到肌肉用力的工作状态。本研究发现,下肢各主要肌群在肌电触地前激活阶段、触地后激活阶段和缓冲阶段,主动着陆的大部分肌电振幅显著大于被动着陆。在高冲击力的任务中,肌肉预激活的主要目的是增加下肢肌肉的稳定性。此外,有研究还认为,触地前激活程度越高,越有利于降低前交叉韧带损伤的风险。在触地后激活阶段和缓冲阶段,肌电活动的增加主要是为了稳定膝关节,并为后续任务做准备。因此,主动着陆能够更好的维持下肢稳定性,并降低相关冲击损伤的风险。上述观点较为传统地分析了肌肉活化的模式,认为肌肉活化的目的是为人体运动系统的下一步动作进行准备,并且为关节力矩的产生起到了重要的作用[12]。
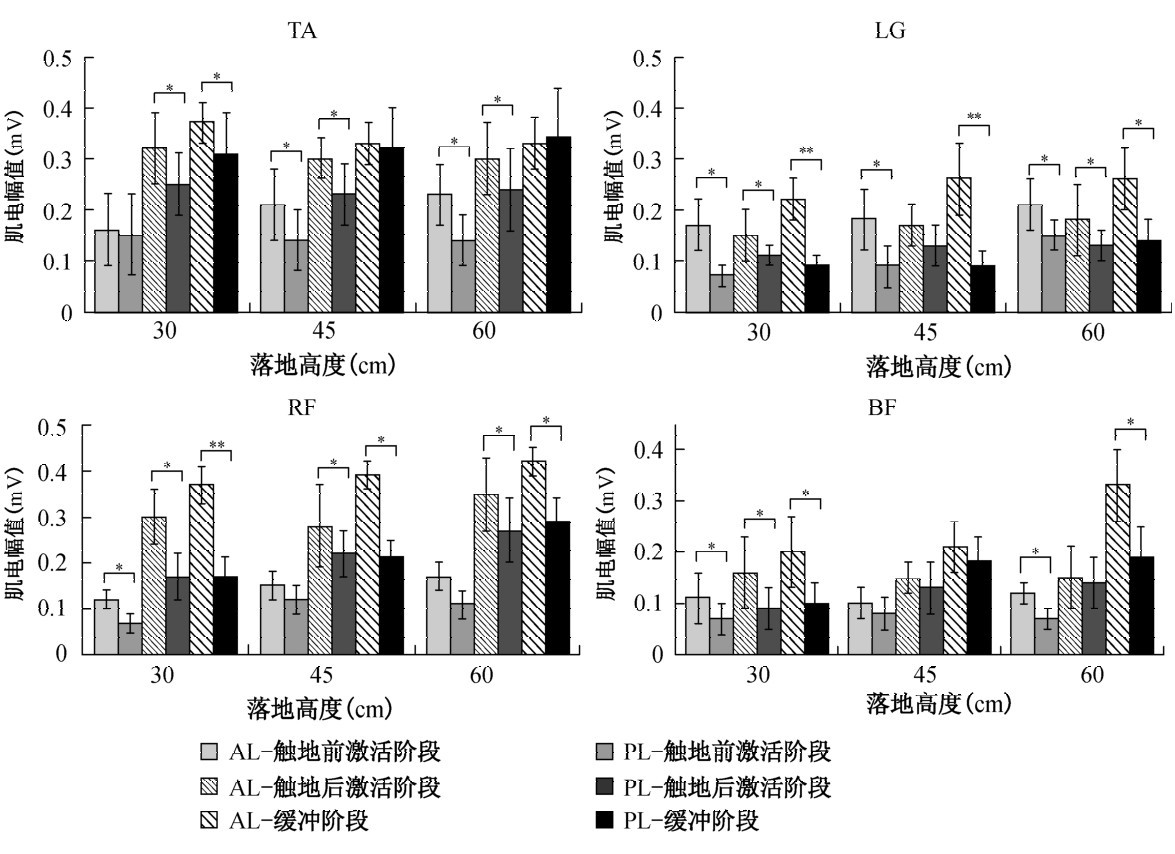
图6-5 不同着陆方式下肢肌电振幅比较
(AL:主动着陆;PL:被动着陆;TA:胫骨前肌;LG:外侧腓肠肌;RF:股直肌;
BF:股二头肌;*,具有显著性差异,p<0.05)
有学者提出了一种新的范例,认为在触地阶段,肌肉可以通过调谐作用而减少相应软组织的振动[9],该理论被称为“肌肉调谐”。具体表现为,机体通过肌肉适应可以改变软组织的力学特性,从而使软组织受冲击时的振动最小化。从本研究的结果来看,主动着陆时,人体肌骨系统会对整个主动着陆起跳过程进行动作控制,募集更多肌肉细胞参与运动,产生足够的肌肉力矩来完成目标动作。被动着陆时,对整个动作无法提前预知,可能缺乏主动调节意识,造成了相应肌肉的参与较少。上述发现一定程度上验证“肌肉调谐”理论。此外,Boyer和Nigg[9]对人体在不同表面跑步的肌肉活动的研究中也得到了相类似的结果:不清楚跑道情况比清楚跑道情况在触地后软组织的加速度显著增加。
综上所述,着陆反跳的预着陆阶段,肌肉激活现象十分明显,为即将触地缓解冲击和随后的起跳做准备。在主动着陆瞬间,使下肢三关节运动学的变化更为合理,缓解冲击的同时积蓄能量,并利用这部分能量更好地起跳。但在被动着陆情况下,肌骨系统不能及时对着陆做出准备,使得身体以更直立的状态着陆,导致较大的冲击,且对冲击的衰减也更加被动,使肌骨系统承载更大的冲击负荷,进而增加了损伤的风险。