6.3.3 软组织振动
6.3.3.1 测量参数定义
主动着陆反跳支撑期约持续35~400ms,而被动着陆后身体回复到直立稳定位需约300ms,两种动作下落时的冲击阶段约占40~70ms(总支撑时间的12~20%)。为了避免主动着陆后再次起跳前对软组织振动产生的影响,选取的总体有效数据的个数约为300~400个(根据再次起跳影响的不同)(图6-17)。利用DASYLab8.0和Origin7.5对所选取的股四头肌和股后肌群软组织振动信号采用100Hz的低通滤波器滤波后,结合鞋跟加速度信号,根据频率响应函数(Frequency Response Function,FRF),即系统的传递性来分析下肢软组织振动系统的力学特性。在本研究中具体指:利用足跟所受到的冲击力作为一种输入信号,传递到下肢不同的软组织室,并产生振动作为对于此种冲击的响应,但当输入信号与系统固有频率一致时,会产生共振现象,即在系统的共振频率范围内,传递性的幅值达到最大。
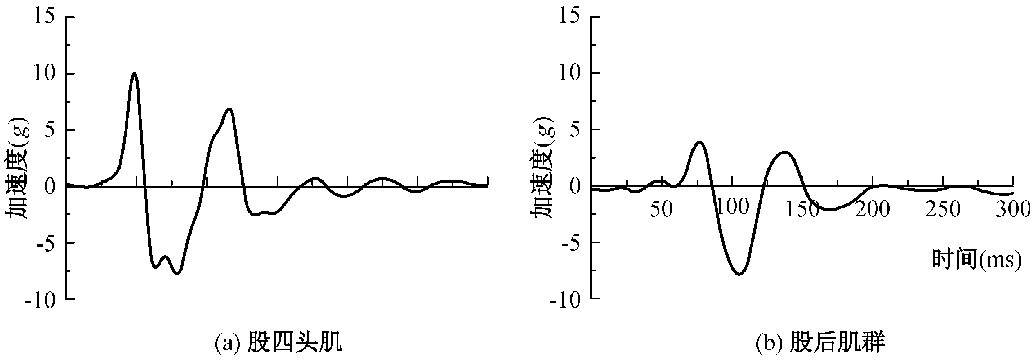
图6-17 从30cm高度着陆反跳过程中股四头肌和股后肌群振动曲线
上述传递性关系函数式的计算主要由触地阶段的鞋跟加速度(输入信号)和软组织加速度(输出信号)的自功率谱(Auto Power Spectrum,APS)和互功率谱(Cross Power Spectrum,CPS)完成,而这两种谱的结合计算能够减少噪音信号对于传递函数结果的影响。
自功率谱的运算方程为:
I(f)=FFT(I[t])(6-9)
APS(f)=I(f)×conj(I[f])(6-10)
而互功率谱的运算方程为:
O(f)=FFT(O[t])(6-11)
CPS(f)=O(f)×conj(I[f])(6-12)
其中,I(f)和O(f)分别代表输入和输出信号经过FFT转化后以频率为自变量的振幅函数。conj(I[f])代表输入信号的共轭线性谱。
因此,频率响应函数(传递性)为:
H(f)=CPS(f)/APS(f) (6-13)
其中,CPS(f)代表受试者在每种着陆情况下的平均互功率谱,而APS(f)则为平均自功率谱。所得的传递性峰值(Hmax)所对应的频率代表软组织振动系统的共振频率f R(图6-18)。
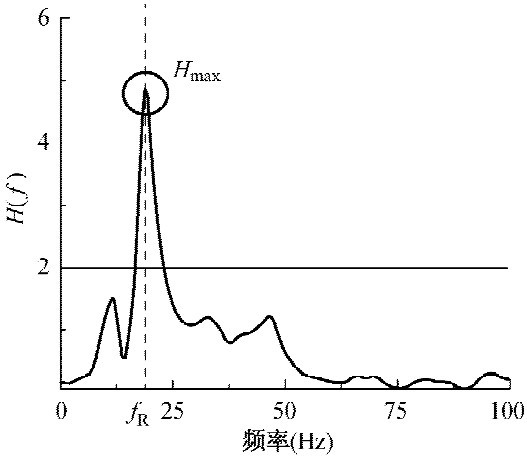
图6-18 从30赫兹高度被动着陆冲击阶段股四头肌软组织系统传递函数曲线
(Hmax:传递性峰值;f R:共振频率)
6.3.3.2 测试和分析结果
利用重复测量的双因素方差分析,观察运动鞋×高度(2×3)对于软组织共振参数的影响,并采用Tukeypost-hoc检验进行事后两两比较,显著性水平设为P<0.05。对于下肢各软组织系统的共振频率(f R)而言,在主动着陆反跳过程中,股四头肌和股后肌两者的共振频率并没有因为穿着不同的运动鞋而产生明显改变(图6-19);只有在45cm被动着陆过程中,强缓冲鞋组股四头肌以及股后肌的f R存在大于对照鞋组的趋势(P<0.01)。同时,在主动着陆反跳过程中,高缓冲鞋对于股四头肌和股后肌系统的传递性峰值(Hmax)并没有显著影响,其值更多的是随着高度的增加而变大(图6-20);然而,在60cm被动着陆时,强缓冲鞋组股四头肌以及股后肌的Hmax均显著小于对照鞋组(P<0.05)。
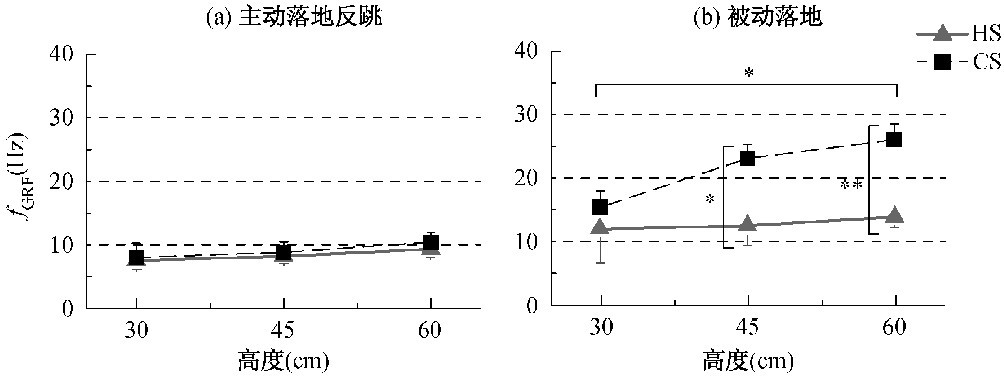
图6-19 主、被动着陆时运动鞋对冲击力频率的影响
(HS:强缓冲鞋;CS:对照鞋;*:P<0.05)
6.3.3.3 运动鞋对软组织振动的影响
在振动力学中,根据频率响应可以分析振动系统的稳定性和运动特性,它是系统对信号的稳态响应属性,由系统的幅频和相频特征组成。频率响应函数,即系统的传递性,是指当某一振动系统受到简谐激励时,稳态输出相量与输入相量之间的传递函数,表现为输出和输入的互谱与输入的自谱之比。但当输入信号与系统固有频率一致时,则会产生共振现象,即在系统的共振频率范围内,传递性的幅值达到最大。这一输入和输出之间的振动信号关系应用到生物力学领域,即所谓的生物动力学响应[9]。本研究中以着陆时足跟所受的冲击以及股四头肌和股后肌群产生的振动分别作为输入和输出信号,当两者信号的频率一致时引起共振,表现为在软组织系统的共振频率范围内,传递性的幅值最大,增加了产生冲击损伤的可能。
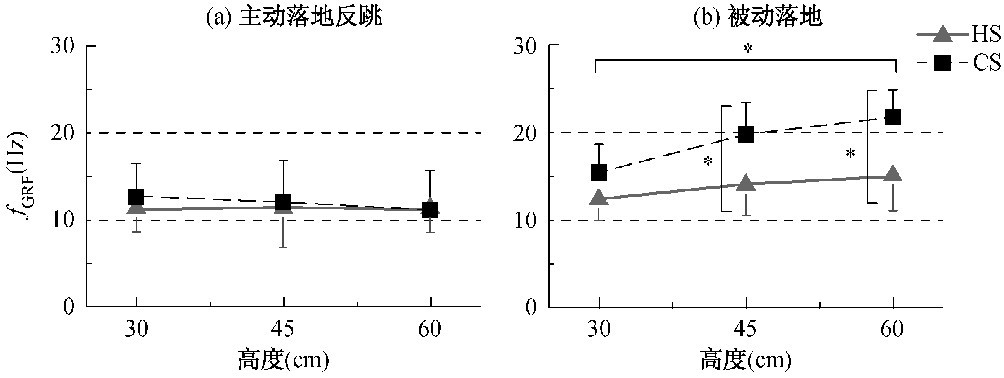
图6-20 主、被动着陆时运动鞋对鞋跟加速度主频的影响
(HS:强缓冲鞋;CS:对照鞋;*:P<0.05)
本研究结果发现,不论主动着陆还是被动着陆条件下,股四头肌和股后肌的共振频率并没有因为运动鞋因素的介入而产生显著差异。Wakeling和Nigg[5]研究发现,人体下肢软组织的共振特性主要依赖于肌肉的力量、长度和收缩速度,并会因为运动方式的改变而影响软组织相对于骨骼的振颤表现。Boyer和Nigg[10]发现,软组织的振动存在个体以及肌肉的特异性,且频率本身与跑步姿态存在一定联系,提示本研究中不同运动鞋条件确实无法改变软组织共振频率,相反,着陆方式动作控制模式的变化可能会更大程度上影响下肢软组织的振动频域特征。
另一方面,在主动着陆反跳时,运动鞋没有显著改变冲击阶段相应软组织振动的传递性峰值(Hmax)(图6-21)。从振动力学角度而言,针对能够被神经中枢预先调控的动作,人体肌骨骼系统能够通过减小冲击传递、改变振动频率和/或阻尼特征,确保软组织振动系统的共振最小化。在主动下落过程中,神经肌肉的运动控制使相应肌群在触地前产生适当预激活,改变包括下肢关节角度、角速度、刚度等在内的着陆策略,并最终影响软组织的振动反馈,而此时,运动鞋对于改变地面冲击输入及软组织振动输出信号的作用并不突出。
与此相反,从60cm高度被动着陆时,强缓冲鞋股四头肌以及股后肌群受到冲击负荷时的Hmax均显著小于对照鞋。这一结果与Boyer和Nigg[10]的部分研究相似,在足跟模拟钟摆撞击的过程中,下肢相应软组织的传递性会随着冲击表面的改变而变化,同时,股四头肌、股后肌和小腿三头肌均受到运动鞋和共振频率范围的交互影响。考虑到运动鞋因素的介入确实能够改变冲击力这一输入信号,从而进一步对整个软组织系统的振动特性产生作用。因此,在肌肉已被适当激活的着陆控制下,人体自身对于冲击以及随后软组织振动的调节能力远大于运动鞋缓冲能力的差别,从预防受伤的角度,掌握合理的着陆技术、提高预激动水平就远比运动鞋本身的缓冲避震性能要重要。然而,在某些情况下,如疲劳、姿势动作不合理、未预料的着陆等,人体神经 肌骨系统的调节能力下降或不当,此时运动鞋的作用就显得更为重要。
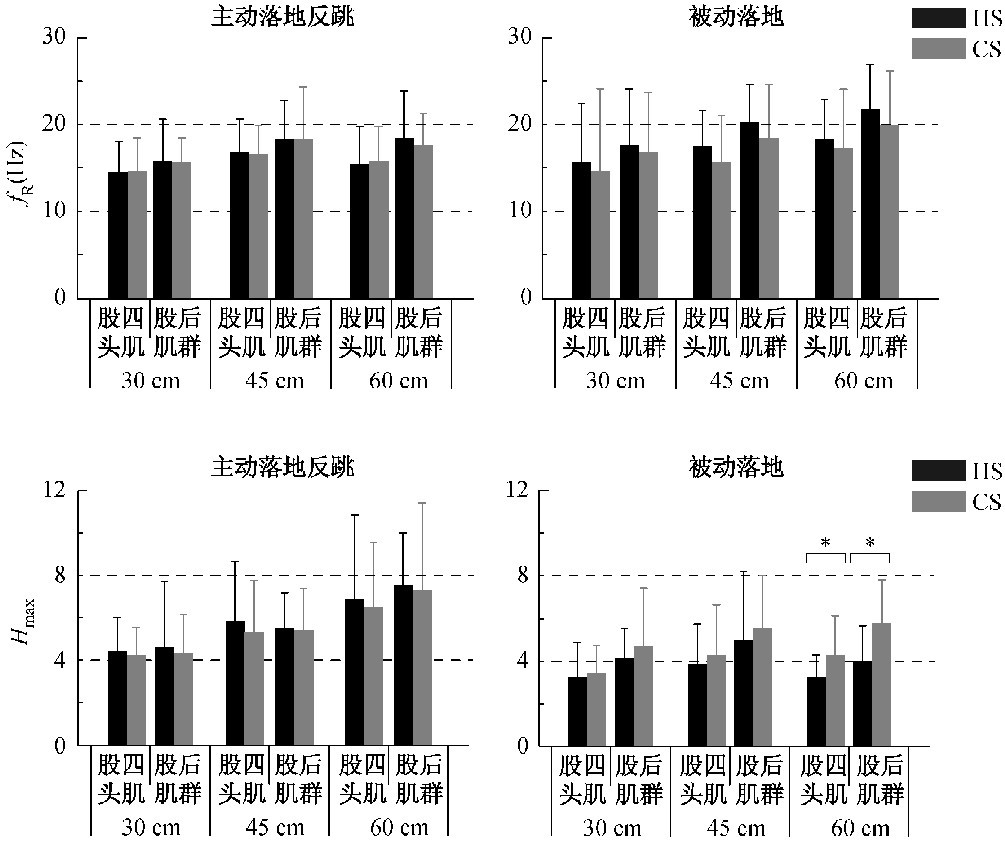
图6-21 主、被动着陆时运动鞋对股四头肌和股后肌系统共振频率(f R)和传递性峰值(Hmax)的影响
(HS:强缓冲鞋;CS:对照鞋;P<0.05)
本研究采用几乎无缓冲的普通鞋作为控制鞋,其目的是为了与强缓冲鞋进行对照同时,不让足在完全没有保护的情况下完成负荷较大的着陆冲击。因此,未来的研究可以聚焦不同中底性能的鞋(如硬度、材料等)以及不同着陆策略对于下肢肌骨系统的反馈表现。