2.1 VANETs车载网络概述
最早关于车辆间通信的研究可以追溯到20世纪80年代初的日本[8]。2003年, 美国联邦通信委员会FCC (Federal Communications Commission) 为车载网络专门分配了75MHz频谱用于部署车载安全及DSRC(Dedicated Short Range Communication) 通信系统[9,10],为行车环境下的无线接入提供了便利。随后, 欧美等国家也相继启动了VNAETs科研项目, 美国交通部将VANETs技术定义为智能交通系统ITS (Intelligent Transportation Systems) 中一个核心组成部分,图2.2所示为美国交通部定义的ITS的系统结构[11]。同时,各国学者及科研机构相继投入到VANETs相关技术的研究中来, 例如美国马里兰州立大学的Traffic View[12,13]项目,欧洲多国合作开展的Fleenet[14,15]项目以及德国的Networkon Wheels[16]项目等。
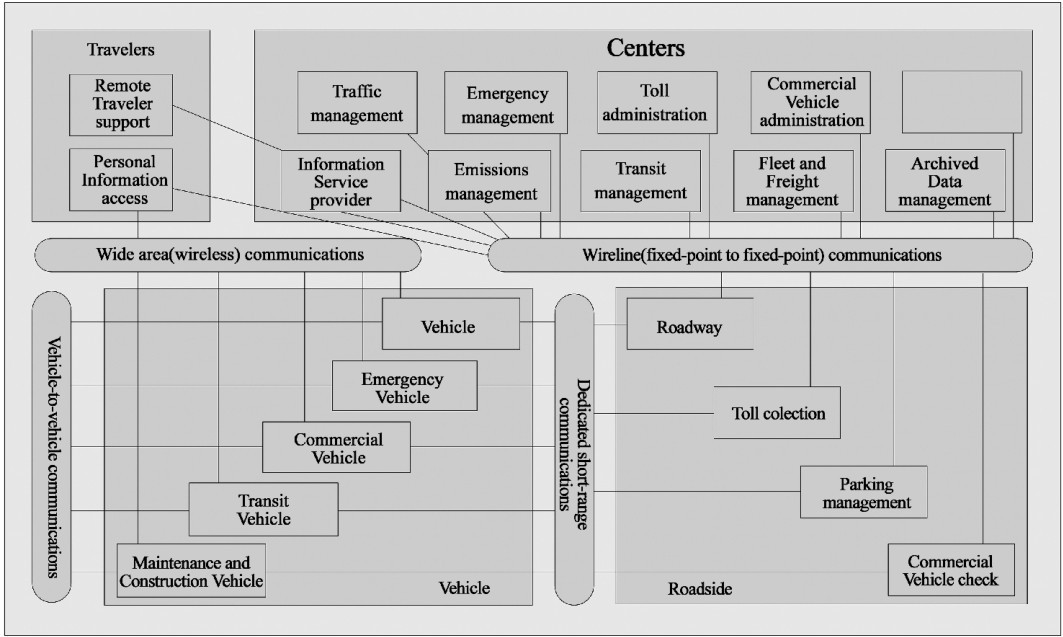
图2.2 美国交通部提出的ITS系统结构
从图2.2中也可以看出, 整个VANETs根据节点结构不同可以分为车与路边通信 (Vehicle to Roadside, V2R) 或车与固定基础设施通信 (Vehicle to Infrastructure, V2I), 车与车通信 (Vehicleto Vehicle, V2V), 车与车、 固定基础设施结合的混合型网络[17]三种类型。其中,V2R/V2I网络需要基础设施支持才能完成车辆与路边接入点、 车辆与车辆之间的信息交互, 见图2.3 (a)。 该类型的网络主要适应于与固定设施相关的信息交互服务, 如不停车收费 (Electronic Toll Collection System, ETC) 等应用。
V2V网络是真正不需要基础设施支撑的车载无线自组织网络。 V2V由道路环境中分布的车辆以自组织的方式构成, 组网灵活方便, 可扩展性较强,鉴于其直接作用于提供服务资源的车载终端上, 见图2.3 (b)。 本书研究的VANETs网络就采用V2V模式。(https://www.daowen.com)
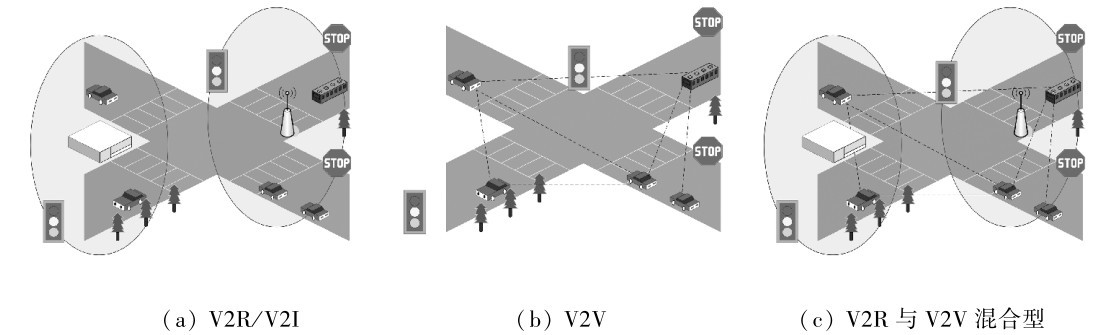
图2.3 车载自组织网系统分类
V2R/V2I与V2V混合组网的方式充分融合两类网络的特点, 并发挥各自优势, 可将车载网络接入到其他网络中, 扩展性更加强大, 提供的应用服务也更加丰富, 见图2.3 (c)。 这种模式暂不属于本书研究范畴。
事实上, 单一内容和形式的信息服务已经不能满足越来越复杂的应用场景需求, 如某车载用户希望在获取到达目的地的行车路线同时, 还要获悉目的地附近停车场车辆分布情况, 这样复杂的任务就需要将不同车载提供的信息服务进行组合, 再返回给服务请求者, 上述服务案例是VANETs服务组合一个典型应用场景。 由于VANET特殊的网络环境、 特殊的运动规律及特殊的应用背景, 基于VANETs的服务组合存在巨大的困难和挑战。