3.5 仿真实验与分析
3.5 仿真实验与分析
实验1: 基于跨层QoS的服务执行路径选择算法LOSPSA仿真分析。
为验证3.3.3提出的QoS驱动的服务执行路径选择算法LOSPSA的有效性及可行性,评价其在VANETs环境下的性能,采用NS-2[73]网络仿真器进行仿真。
(1) 仿真场景设置
为比较在不同车辆密度以及车辆移动速度的下LOSPSA的性能, 我们设置了两组仿真场景: 静态环境和动态环境。 在静态环境中除节点是静止不动外, 用户感知的QoS属性也固定不变; 在动态环境中, 车辆运动最大速度为30m/s, 最小速度为0m/s。 物理层和MAC层均采用802.11标准, 符合实际VANETs系统的条件, 无线传播模型选取贴近实际道路环境的Shadowing模型, 仿真场景的参数设置如表3.5所示:
表3.5 仿真参数设置
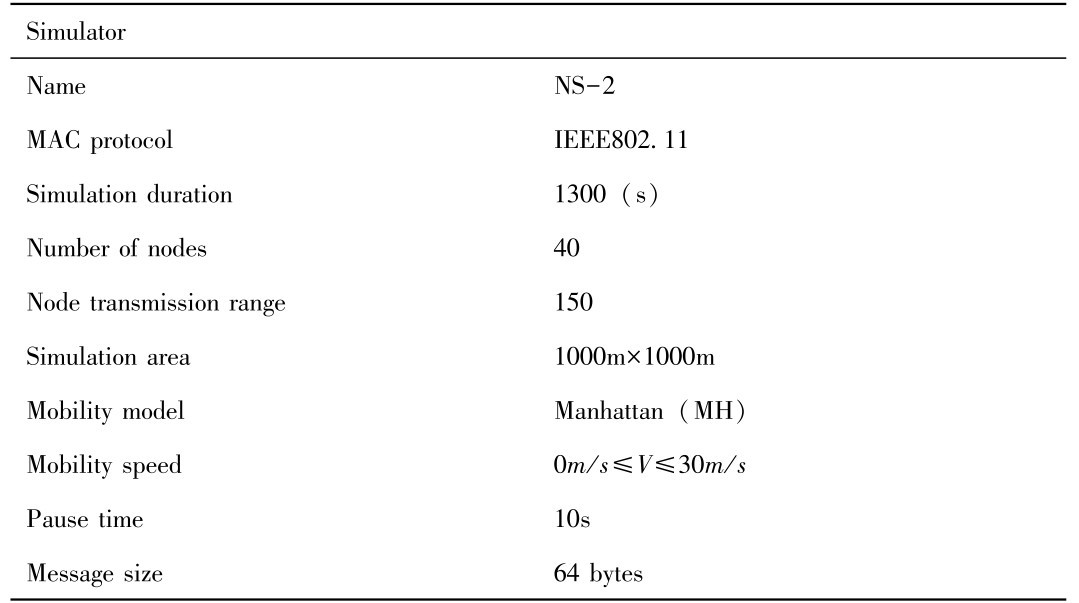
在本实验中,我们将40个移动节点放置在场景大小为1000×1000 (m2)的MH移动模型中, 传输半径为150m。 VANETs车辆节点上承载四种基本服务s1,s2,s3,s4{ },对应实现功能为{f1,f2,f3,f4},这些服务资源可随机组成含有k (1≤k≤4) 个任务的满足用户需求的组合服务, 假定在网络中随机选择客户节点, 每隔10s产生一次服务组合请求。
(2) 性能评价指标
为了验证QoS驱动的服务执行路径选择算法LOSPSA性能的优劣, 本章利用NS⁃2 simulator对不同的服务组合策略Dis⁃Comp、 Random⁃Comp以及本书所提出的LOSPSA进行仿真对比。 首先简要阐述Dis⁃Comp和Random⁃Comp算法, 如图3.12a,3.12b所示。
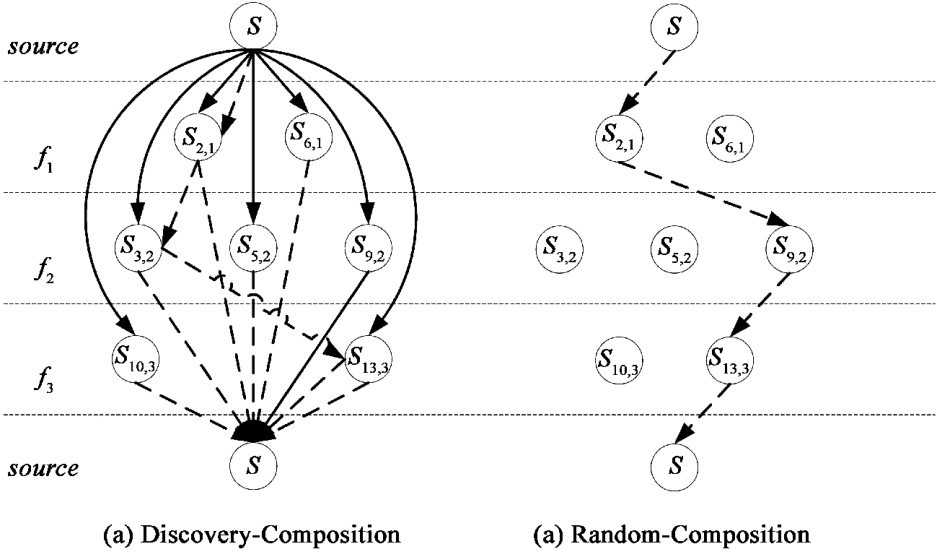
图3.12 Dis⁃Comp和Random⁃Comp两种服务组合策略示意图
①先发现后组合算法[94,95](Discovery⁃Composition, Dis⁃Comp): 在服务组合阶段, 首先需要依据基本服务的QoS从实现特定功能的服务副本中挑选出最佳基本服务; 接下来再考虑网络层QoS属性寻找并确立每两个基本服务间的通信路由。 本算法可考虑到基本服务的QoS, 但相邻两个基本服务间的路由此时并不确定, 组装后的组合服务不一定满足用户QoS需求和资源消耗要求。
②随机组合算法[96](Random⁃Composition,Random⁃Comp):用户随机选择一个邻居节点, 向其发送关于发现第一个基本服务的请求信息, 若该邻居节点恰好能提供相应基本服务, 则该节点将向它的任意一个邻居节点发起发现关于第二个基本服务的请求信息, 这种发现过程一直延续到最后一个基本服务被发现为止。 可以看出, 尽管Random⁃Comp产生较少的控制消息, 但该策略最多只能生成一条服务路径, 且该服务路径的有效性、 可行性以及QoS属性均无法保证。
主要针对以下三个性能指标进行评价:
 服务组合成功率 (Service Composition Success Ratio,SCSR): 反映算法成功建立服务执行路径的能力, 可表示为:
服务组合成功率 (Service Composition Success Ratio,SCSR): 反映算法成功建立服务执行路径的能力, 可表示为:

 服务价格qpr,qpr表示该服务组合的费用。其中单跳链路传输价格qpr (lij)=1,基本服务价格0<qpr(si)≤10随机部署于网络节点之上,实现同一功能的不同服务实例可能具有不同的费用。服务价格qpr可表达为:(https://www.daowen.com)
服务价格qpr,qpr表示该服务组合的费用。其中单跳链路传输价格qpr (lij)=1,基本服务价格0<qpr(si)≤10随机部署于网络节点之上,实现同一功能的不同服务实例可能具有不同的费用。服务价格qpr可表达为:(https://www.daowen.com)

 服务可用性qav,qav表示该服务组合可被客户请求节点使用的概率。理论上等于所有服务可用性及传输可用性之积,50%≤qav(si)≤100%随机发生在基本服务之上,qav(lij)=1。服务可用性qav可表达为:
服务可用性qav,qav表示该服务组合可被客户请求节点使用的概率。理论上等于所有服务可用性及传输可用性之积,50%≤qav(si)≤100%随机发生在基本服务之上,qav(lij)=1。服务可用性qav可表达为:

(3) 仿真结果分析
首先, 我们来揭示在不同服务密度下各算法建立服务组合的成功率SCSR。 本实验中, 服务密度指在VANETs中完成某一功能的服务副本数占移动节点总数的比值, 这里设置其以5%的步长从5%增加到30%.
如图3.13所示, 可以看出, 无论是静态环境还是动态环境中, 我们提出的服务执行路径选择算法LOSPSA较其他的服务组合算法Dis⁃Comp、 Random⁃Comp在服务组合成功率上有明显的优势。 例如在动态环境中, 服务密度为30%时, Dis⁃Comp、 Random⁃Comp两种算法对应的服务组合成功率为67%和43%, 而LOSPSA的成功率高达91%。 在每种算法中, 服务组合的成功率随着服务密度的增加而增加, 这是主要由于节点的移动性导致更多的服务节点可用, 提供了建立并选择更优服务执行路径的机会。 比较图3.13 (a) 和 (b)可以发现, 动态环境中不同算法实现的服务组合成功率均比静态环境中高,这同样是由于节点移动性带来了更多可用服务资源, 提高了建立最优服务路径的概率。
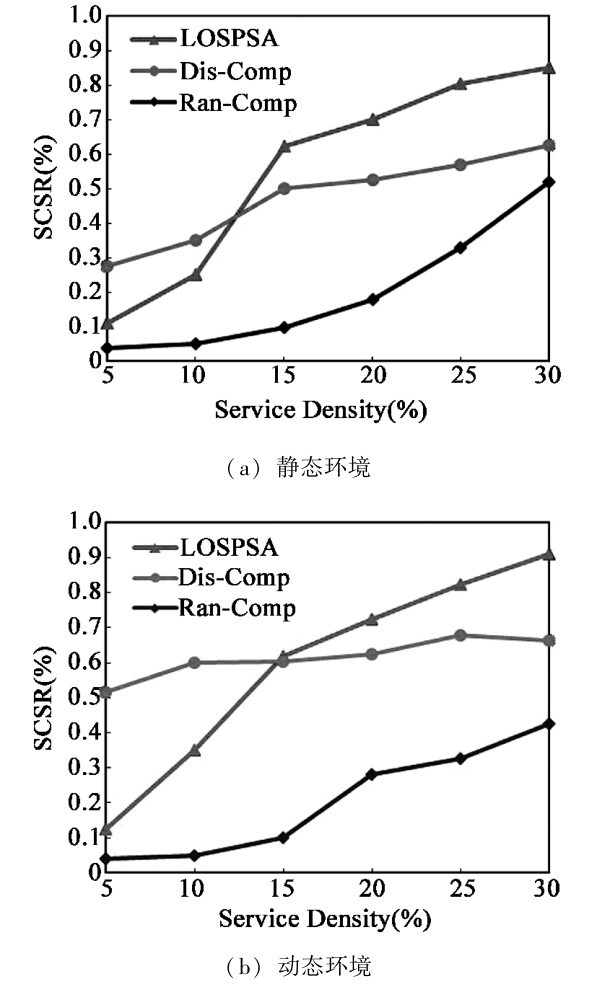
图3.13 不同算法服务组合成功率的比较
如图3.14所示, 可以得出, 无论是静态环境还是动态环境中, 我们提出的服务执行路径选择算法LOSPSA较其他的服务组合算法Dis⁃Comp、 Random⁃Comp在服务执行路径建立费用上有明显的优势。 在静态环境中, LOSPSA建立服务执行路径的平均费用是38, 其余Dis⁃Comp、 Random⁃Comp建立单条服务执行路径的费用为54和44; 动态环境下, LOSPSA, Dis⁃Comp和Random⁃Comp三种算法建立的执行路径平均费用分别是33, 48和40。 图3.14表明各种算法在动态环境中的服务组合费用较静态环境中少, 这同样是由于节点的快速移动性带来了更多性能更好的可选服务资源, 与动、 静态环境下服务组合成功率的分布存在相似的原因。
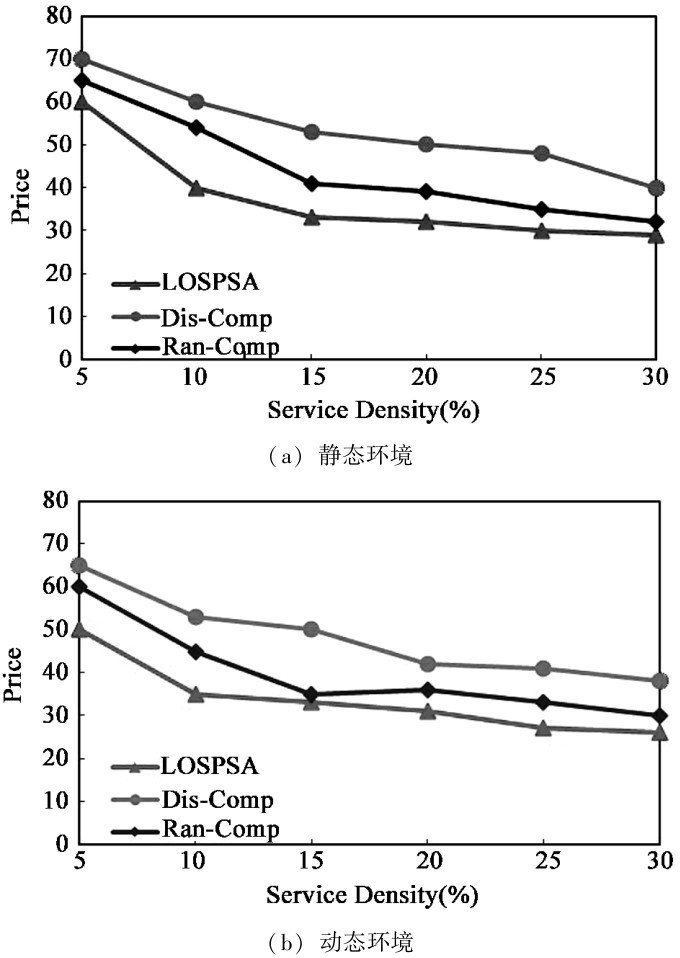
图3.14 不同算法服务组合费用的比较
接下来我们讨论不同服务组合算法中车载节点移动速度对服务组合可用性产生的影响。 设置节点的平均运动速度为5m/s, 10m/s……30m/s (步长为5m/s), 在这样的动态环境下针对LOSPSA以及Dis⁃Comp、 Random⁃Comp算法进行仿真实验。
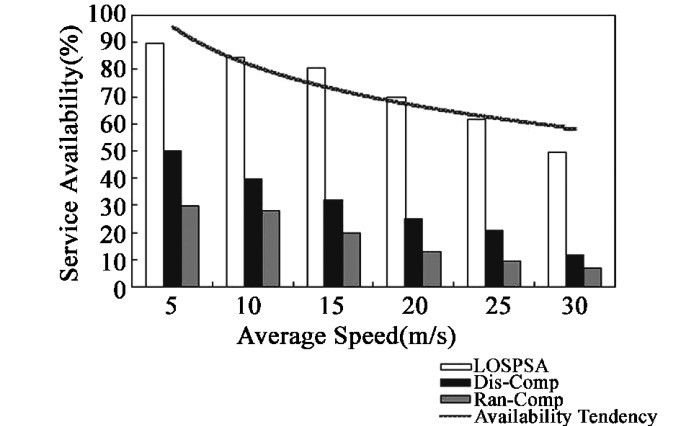
图3.15 服务可用性与节点速度的关系
如图3.15所示, 三种算法所建立的服务执行路径可用性都随着节点速度的增加而呈下降趋势。 相比而言, LOSPSA表现出了较好的性能, 即在速度30m/s时, 服务可用性也近似达到了50%, 这是由于两次打分机制的LOSPSA算法在服务执行路径选择的过程中采用跨服务覆盖层的设计思路, 充分考虑了上层组合服务的服务质量及物理网络层路由链路的稳定性及可靠性, 确保了服务可用性最高。
实验2: 对于基于速度和距离的服务路径维护算法VDBHA有效性及可行性的验证。
首先为分析底层网络链路连通情况, 给出VANETs物理网络层关于链路连通时间及路径连通时间的模拟, 如图3.16所示。
从图3.16可以看出,在Vmax=5m/s时,车辆节点的链路连通时间呈现随机性的分布, 链路连通时间在100s附近出现的峰值可以分析是由于两节点之间反向运动造成的, 其他小的峰值也随机出现链路连通时间较大的地方, 如在250s附近, 可以判定是同向运动的两节点形成的; 基于本章给出的链路连通时间及服务路径生存时间的定义, 左侧的峰值决定了服务路径的连通时间,其下的面积远远大于右侧峰值下的面积;而当车速提高到Vmax=30m/s时,链路连通时间和路径连通时间呈指数型分布, 长度为3跳的服务路径生存时间基本在10s之内。 因此, 服务切换算法VDBHA基于对链路剩余连接时间预测进行服务路由预发现的策略对于服务组合有效执行十分必要。
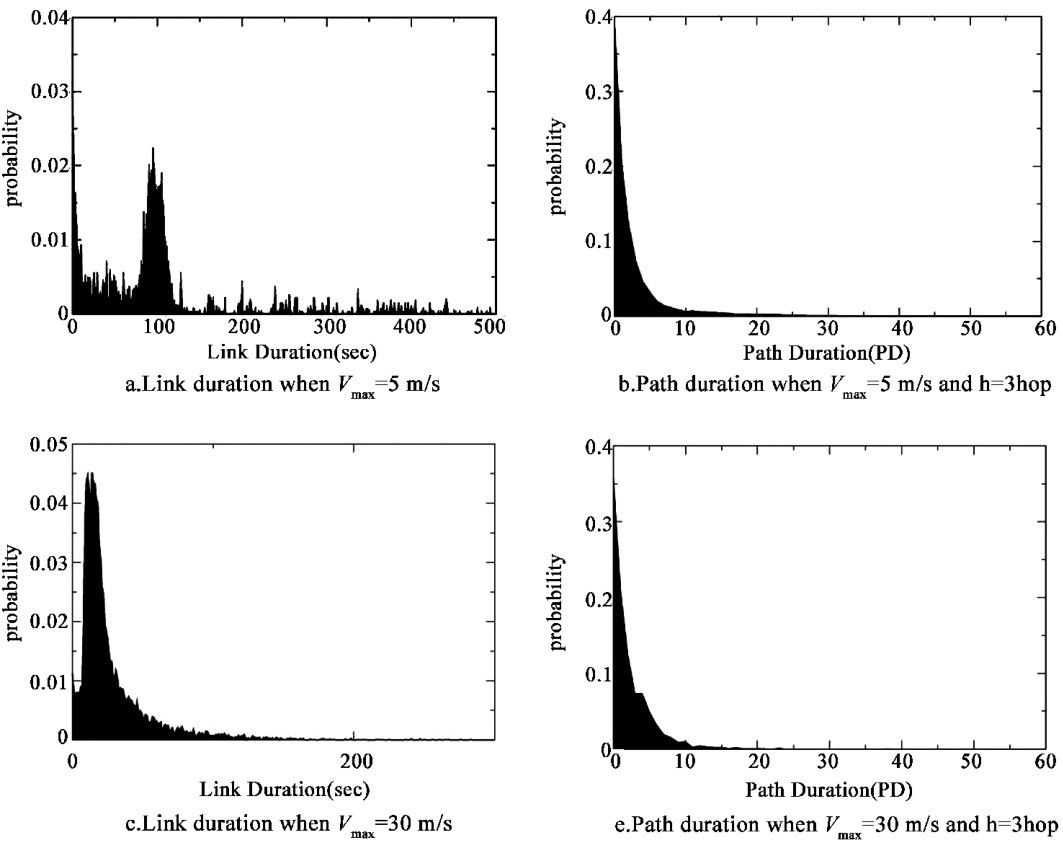
图3.16 不同移动速度下的连通性
为验证基于速度和距离的服务切换机制在服务执行路径选择算法中的有效性, 本章对LOSPSA选择的服务执行路径在使用服务组合切换机制VDBHA前后的性能进行比较。 实验主要考察在VANETs中车辆节点速度加快时, 采用服务切换机制VDBHA算法的执行路径与LOSPSA直接生成的服务执行路径的服务可用性的比较, 分别设置节点的最大移动速度为5m/s, 10m/s……30m/s, 仿真参数同表3.5所示。
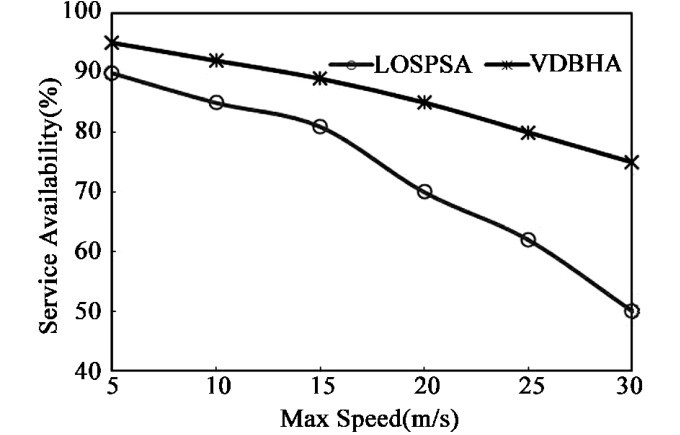
图3.17 LOSPSA与VDBHA算法服务可用性比较
如图3.17所示, 服务执行路径可用性都随着节点速度的增加而呈下降趋势。 相比而言, 采用了服务切换算法VDBHA的服务执行路径表现出了较好的性能, 即在速度30m/s时, 服务可用性也近似达到了80%, 这是由于VDBHA切换算法基于对链路稳定性的预测, 实时发现并备份可替代服务组件, 一旦失效, 则启动备份服务, 大大降低了组合服务失效的概率, 保证了服务执行路径可用性的提高。 由此可见, 在加入服务切换功能后, 服务执行路径选择算法LOSPSA性能优势非常明显, 充分论证了基于速度和距离的服务切换算法的有效性及可行性。