4.2.1 系统模型及定义
首先我们来选择影响路由算法可信度及可靠性的无线电波传播模型, 本书中我们选取被广泛接受的shadowing模型来刻画无线传播的过程。 这主要取决于在城市车载移动Adhoc网络环境中, 无线信号的传输受到道路、 建筑物、地形等各种因素的影响, 不仅产生了大尺度的路径损耗而且伴有小尺度信号衰落。 另外, 多径衰落、 阴影效应及高流动性车辆导致的多普勒效应等造成实际情况下在一定距离接收到的信号能量具有随机性。 Shadowing模型实现了对数正态阴影传播模型[92,93,113](Log Normal Shadowing Model),对理想环境模型进行了扩展, 能更好地预测和模拟此时实际环境下的电波传播情况, 其功率计算由公式(4-1) 给出。

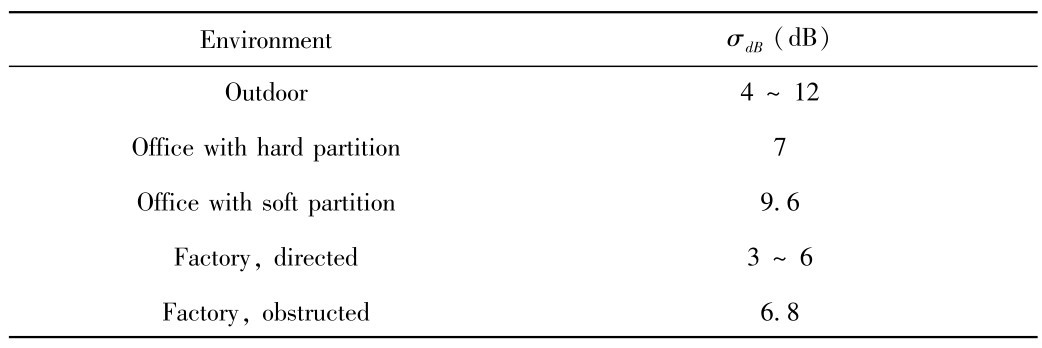
公式(4-1) 表示实际情况下处于一定距离d的信号接收功率Pr(d)随环境不同而随机变化。其中d0及Pr(d0)为接近中心的参考距离及其对应的信号接收功率。β是路径损耗指数, 通常是由场地测量来的经验值, 障碍物越多相对数值越大。Xd B是一个没有任何意义的均值为0的高斯随机变量,标准差为σd B,反映了当距离一定时,接收到能量的变化。β和σd B的几种典型值由表
4.4和表4.5给出[114,115]。
表4.4 passloss指数β的几种典型值
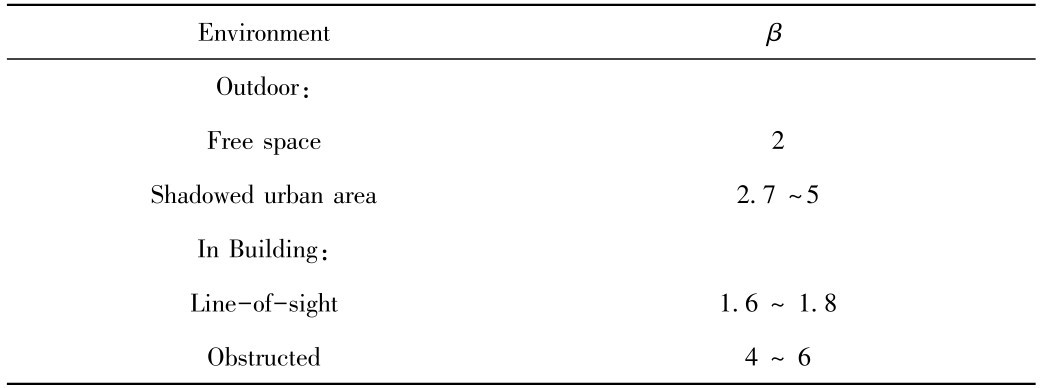
表4.5 shadowing偏离σd B的几种典型值
作为另一个关键因素, 节点移动模型也与路由算法实现密切相关。 目前在VANETs网络研究中, 使用最广泛的移动模型是随机移动模型Random Way⁃point(RWP)[116,117],但这种模型并没有考虑VANETs城市道路的特点,因此对VANETs路由算法的参考意义并不大。 近年来, 很多针对VANETs网络的简化道路移动模型被相继提出, 如Freeway (FW)[117]、 Random Point Group Mobility(RPGM)[118]以及Manhattan (MH)[97,98,119]等。 通过对城市车载VANETs环境的分析, 本书选取MH作为车辆节点的移动模型, 在此基础之上分析设计适用于车载系统用于支撑服务发现组合功能的路由协议。
MH节点移动模型是一种描述城市道路环境中车辆终端移动模式的模型。在该模型中, 节点的移动既受到地理环境的约束, 又受到瞬时速度的制约,对时间也具有一定的依赖性。 具体来说, 节点的运动被严格限制在水平及垂直交错的预定网格道路中, 可以选择两个方向运动。 在交叉路口处节点按照一定的概率左转、 右转或者直行。 如图4.3所示。 MH模型中, 每个车辆终端的瞬时速度依赖于前一时刻的速度及其当前相邻车辆的移动速度。 在同一车道中前后相邻车辆的间距若小于安全距离SD, 则后车的速度要小于或等于前车的速度,运动关系定义如下[97,117]:

正是由于VANETs节点具有如公式 (4-2) 及公式 (4-3) 这样的移动性, 导致了网络拓扑的快速变化及承载上层服务的服务执行路径的频繁时效,因此我们将支撑VANETs服务发现组合功能的路由策略研究重点放在如何自适应动态网络的拓扑变化上, 将链路稳定性、 服务执行路径持续时间作为考量底层路由协议性能优劣的重要指标。
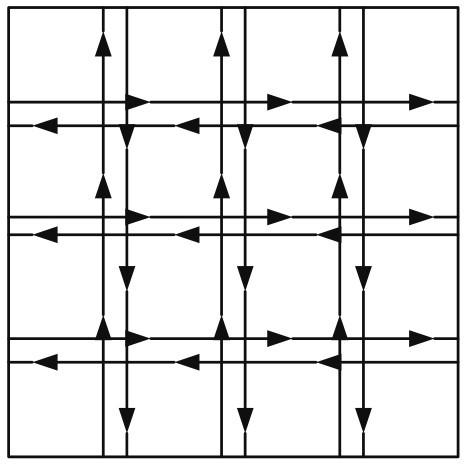
图4.3 Manhattan节点移动模型示意图
综上所述, 基于Shadowing无线传播模型和MH节点移动模型更符合实际情况, 本书会以这两种模型作为研究基础, 模拟城市车载移动Adhoc网络的运行状况, 得到具有高可信度的分析结果。