4.2.3 路由协议设计
上一节对经典AODV协议从模型角度进行定量分析, 结果表明AODV协议并不适应于节点密集以及运动速度较高的城市车载环境, 路由断链概率及路由开销较大, 相应的对于服务覆盖层中服务执行路径的底层支撑就非常困难。 因此, 为增强链路稳定性、 提高服务执行路径可靠性我们设计了一种提取节点运动方向信息来参与路由选择过程的协议DARP, 该算法以路由开销代价最小化以及路由链路稳定性最大化为原则, 选择最优路径。
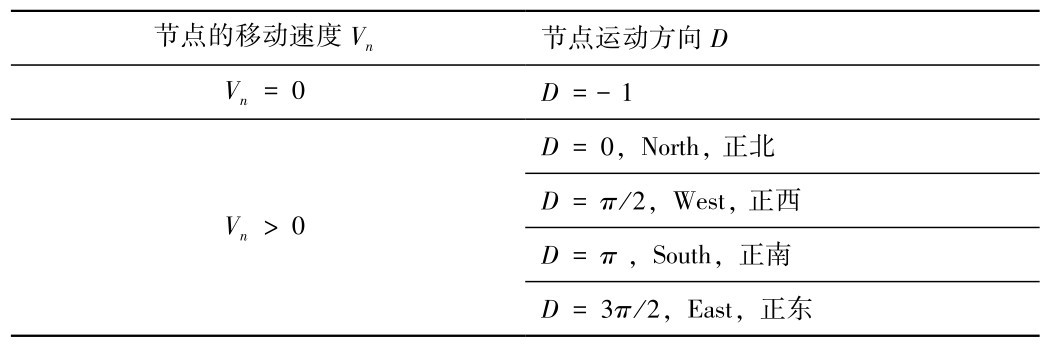
本书所提出的DARP路由协议最显著的特点就是将节点的运动方向信息作为路由决策的主要依据。 其核心理念为反向运动两节点之间的链路稳定性及链路生存时间远不如同向两节点之间的链路维系情况。 DARP路由协议中,每个车辆节点都实时保存并更新当前的运动方向信息, 设节点的移动速度为Vn,运动方向为D,α为方向差异容忍度(0<α <π),相关定义如下:
表4.7 DARP节点运动方向定义
基于上述分析并结合VANETs环境下车辆运动特点, 本书设计的DARP寻路机制如图4.4所示。
参考本书在AODV路由协议中关于路由平均断链次数及路由开销的建模分析过程, 基于表4.7中相关定义, 可提出DARP协议中路由平断链次数及控制报文开销数学模型, 分别由定理4.3及定理4.4描述。
定理4.3:
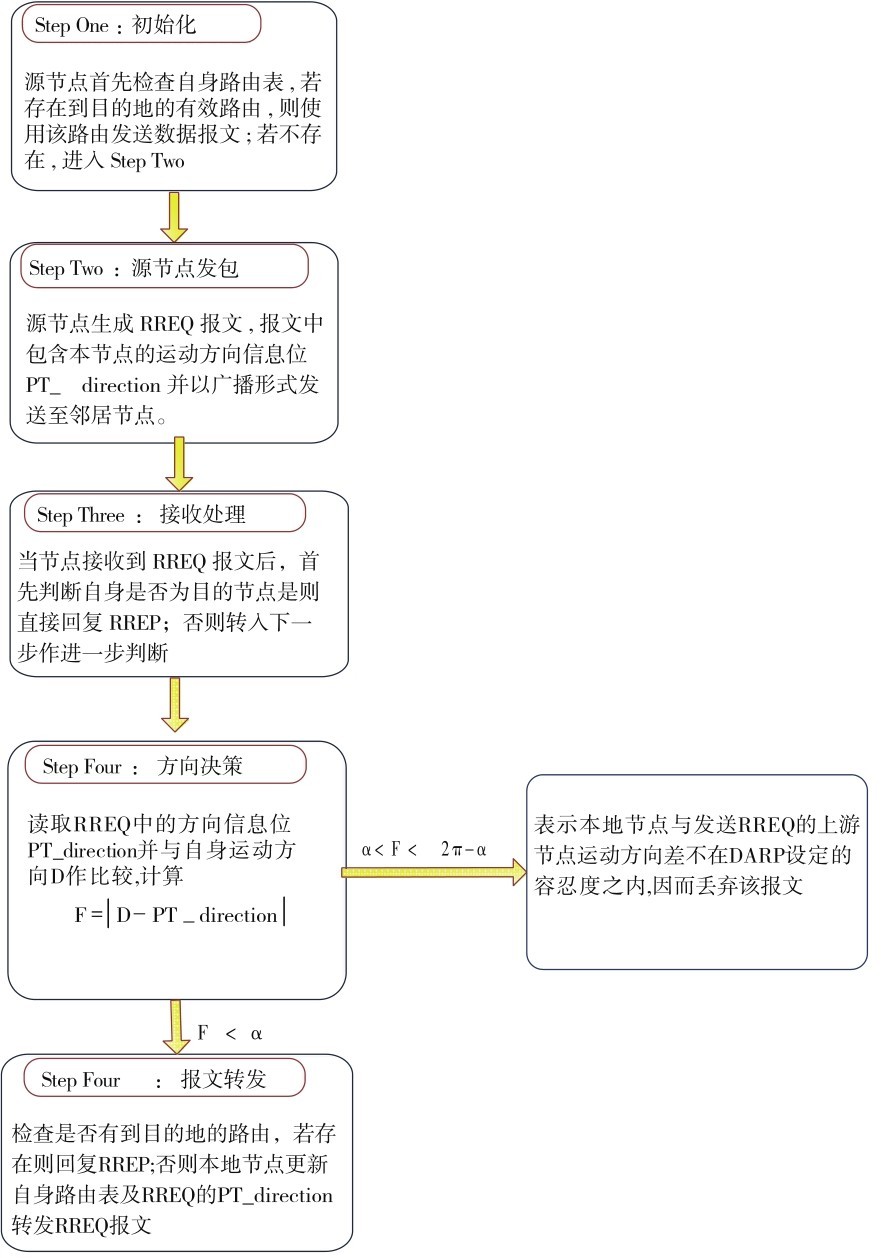
图4.4 ARP路由算法执行流程
DARP路由协议中,对应于服务需求时间Tl内,每一对车辆通信节点发生的路由平均断链次数可表达为

证明: 在DARP路由策略中, 节点选择与自己同向或在方向差异容忍度内的节点作为转发节点。选择α=π/2,结合前提假设:节点的有效传输范围为Lt,源与目的节点的平均距离为Lh,β为单位时间内同向节点的链路断链概率, 可以得到每一对车辆通信节点之间的链路稳定性概率为:

因此, 每一对车辆通信节点发生的路由平均断链次数可表达为

至此,定理4.3证明完毕。与定理4.1比较可以看出,DARP中的N′b不再依赖于节点速度V的高速变化而变化, 尤其是在车辆节点移动速度较快时, DARP路由协议建立的通信链路稳定性具有相对优势, 从而进一步保证服务执行路径稳定性的提高。
定理4.4:
在服务需求时间Tl内,DARP中每一条链路发送或转发的控制报文RREQ平均数量可表达为

证明: 由前提假设可知, VANETs中每个车辆节点的平均邻居节点个数为Nnb= ,而DARP路由策略中,车辆节点可选择的下一跳邻居节点个数可近似于N’nb=
,而DARP路由策略中,车辆节点可选择的下一跳邻居节点个数可近似于N’nb= 。 鉴于实际情况下控制报文RREQ的最大生存周期近似于两倍的通信节点间的平均路由跳数
。 鉴于实际情况下控制报文RREQ的最大生存周期近似于两倍的通信节点间的平均路由跳数 ,因此每一条通信链路的控制报文平均转发次数可以表达为
,因此每一条通信链路的控制报文平均转发次数可以表达为

而DBNP中每一条链路发送或转发的控制报文RREQ平均数量N′RREQ可表达为

至此, 定理4.4证明完毕。 与定理4.2AODV控制报文转发数量比较可以看出,在服务需求时间Tl内,DARP大大降低了控制报文的发送及转发数量,明显降低了寻路过程中的路由控制开销, 进一步减少了生成服务组合执行路径的代价, 提高VANETs下有效资源利用率。