3.5.1 光栅尺
1.外形与结构
光栅是利用光电效应来检测位置变化量的器件,其测量精度可达0.1μm甚至更高,它是高精度数控机床常用的位置、速度检测器件,可动态、连续地检测机械运动部件的实际位置与速度。根据通常的习惯,用于直线测量的光栅称光栅尺,而用于角位移测量的光栅则称光电编码器。
光栅尺的外形与结构如图3.5-1所示,它由光源、标尺光栅、指示光栅、光敏元件、透镜及放大电路等组成;标尺光栅的长度与测量范围相同;光源、指示光栅、光敏元件、透镜及放大电路等安装在读数头上。
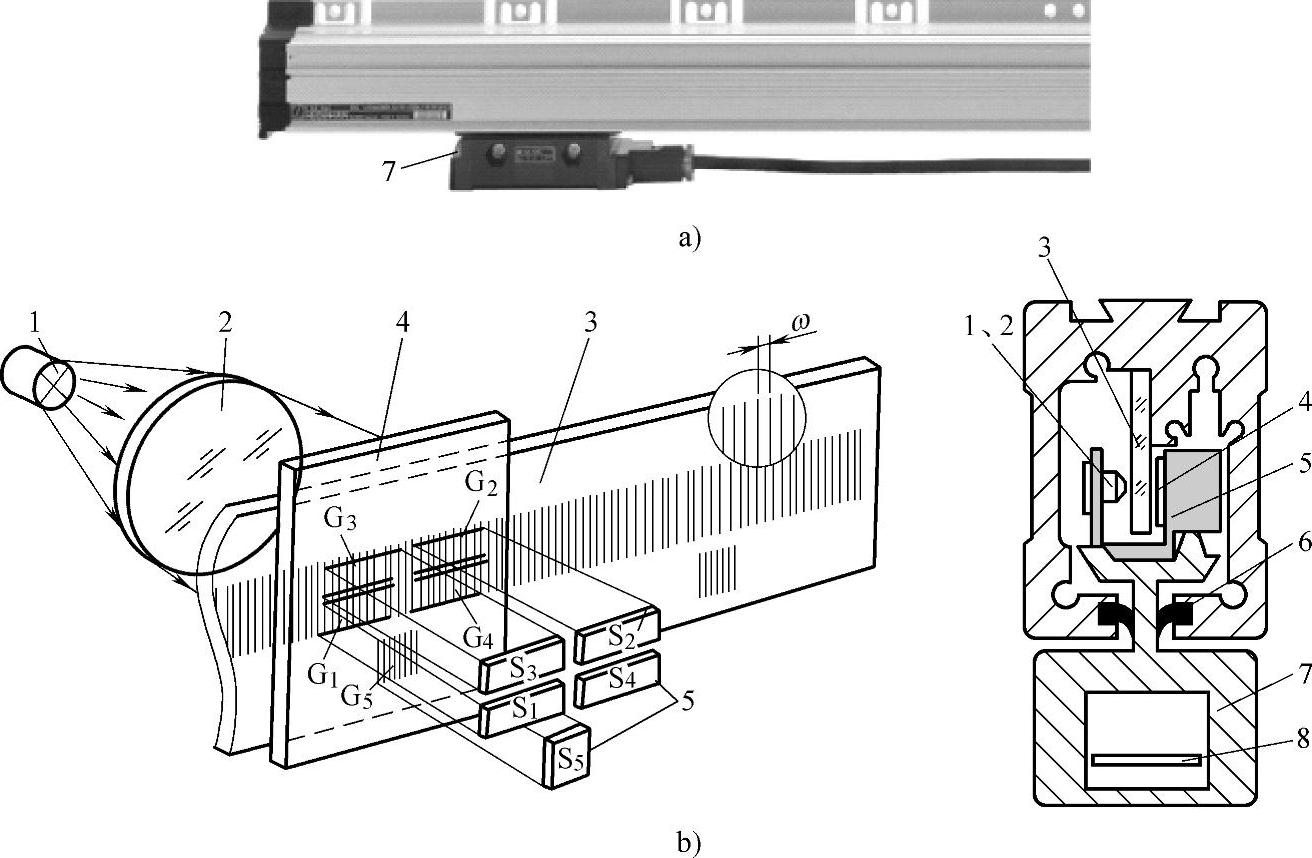
图3.5-1 光栅的外形与结构
a)外形 b)结构
1—光源 2—透镜 3—标尺光栅 4—指示光栅 5—光敏元件 6—密封橡胶 7—读数头 8—放大电路
标尺光栅与指示光栅上均刻有密集的平行条纹(一般为50~200条/mm),条纹间的距离称为节距或栅距。标尺光栅与指示光栅的节距相同,光栅面相互平行,但条纹成一定的角度,以便生成后述的莫尔条纹。
光栅尺的光源一般为长寿命的白炽灯,光线经透镜后变为平行光束。光敏元件可以将光强转变成与之成比例的电压信号,这一信号经过放大电路放大后可以进行较长距离的传输。绝大多数光栅的光敏元件有图示的S1~S5五只,其中,S1~S4用来产生ua、*ua、ub、*ub四组计数信号,S5用来产生零标记(零脉冲)。光敏元件通常按照ua与*ua、ub与*ub互为反信号;ua与ub、*ua与*ub互差1/4节距的方式布置;零标记的间隔距离一般为整数,如10mm、20mm、50mm等。
2.工作原理
由于光栅的条纹非常密集,如果仅依靠光直射所产生的光强进行位置检测,不但容易产生误差,而且光敏元件的布置亦将变得非常困难,因此,实际光栅需要利用莫尔条纹进行检测。
利用光学原理,如指示光栅与标尺光栅的条纹相差一个很小的角度θ,这样就会产生图3.5-2所示的明暗相间条纹,这一条纹称为莫尔条纹。
莫尔条纹的方向与光栅刻线大致垂直;当标尺光栅左右移动时,莫尔条纹就沿垂直方向上下移动;光栅移动一个节距ω时,莫尔条纹就相应地移动一个节距W。
光学分析表明,当光栅夹角θ很小时,莫尔条纹的节距W与夹角θ、指示光栅节距ω有以下近似关系:
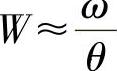
因此,利用莫尔条纹,可将指示光栅的节距与条纹宽度同时放大1/θ倍,也就是说当光栅节距为0.01mm时,如果夹角θ=0.01rad,便可将光栅的节距与条纹宽度同时放大100倍,莫尔条纹的节距为1mm;从而提高检测分辨率。
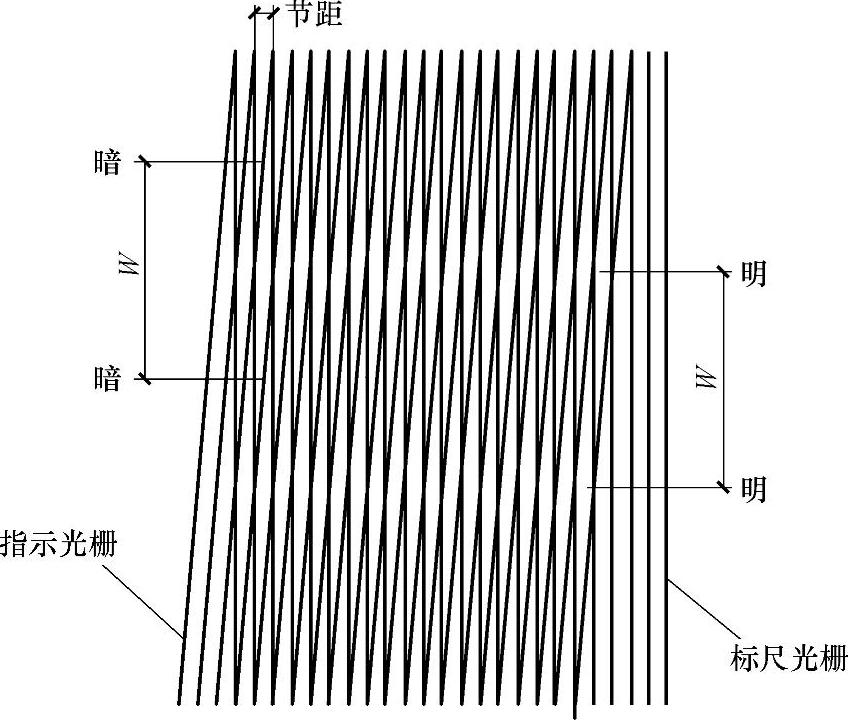
图3.5-2 莫尔条纹
莫尔条纹的另一个显著特点是具有平均效应,由于莫尔条纹是由很多条刻线同时生成,制造缺陷所引起的条纹间断、条纹宽度并不会对莫尔条纹带来多大的影响,因此,其位置测量精度要比光直射式检测要高得多。
3.信号处理
(1)前置放大
为了提高光栅尺的测量精度,一种方法是直接增加光栅条纹的密度;但是,如条纹密度超过200条/mm,其制造将为变得十分困难。因此,在实际光栅测量系统中,一般是需要通过与光栅尺配套的前置放大器,来进行信号的电子细分处理,提高光栅尺的测量精度。在部分光栅尺上,也可能将前置放大器直接安装于光栅读数头上,使得光栅尺的放大电路与细分电路集成为一体。
(2)方向检测
光栅尺的运动方向可通过检测ua、ub的相位确定,由于ua、ub的空间位置相差1/4节距,因此,其输出信号的相位差为90°;如果假设ua超前ub为正向运动,那么ua滞后ub就是为反向运动。
(3)速度检测
光栅尺在单位时间内的输出脉冲数,直接代表了光栅尺的移动速度。因此,机床直线运动部件的运动速度,可通过对输出脉冲的D-A转换等方式实现。
(4)位置确定
增量式光栅的输出信号是以节距为周期的增量式信号,输出的计数脉冲数量可以反映运动距离,但不能以此来确定运动部件的实际位置(绝对位置)。为此,光栅尺上需要每隔一定的距离增加一组零标记刻线,以便CNC等控制装置能够根据零脉冲的数量,来确定光栅移动的区间,从而计算出运动部件的绝对位置值。
4.信号输出
光栅尺的输出信号有图3.5-3所示的正余弦输出、线驱动差分信号输出、TTL电平输出3种;但在高精度位置检测的场合,目前也开始广泛使用串行数据输出,串行数据输出的形式与后述的编码器相同。
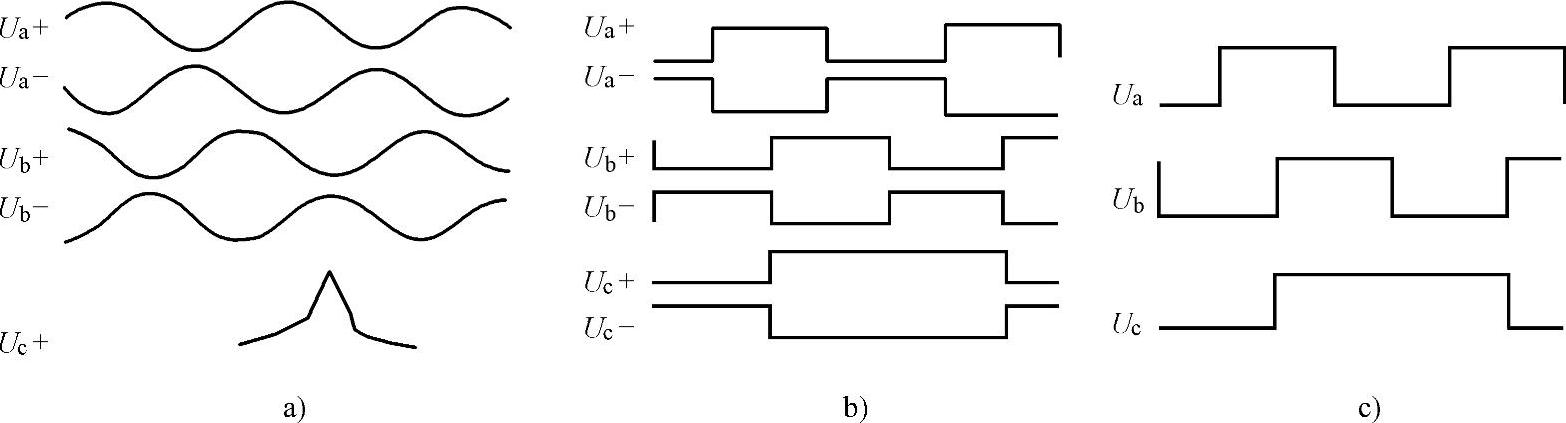
图3.5-3 光栅的输出信号
a)正余弦输出 b)线驱动输出 c)TTL输出
通过放大ua、ub,但未经细分处理的光栅尺输出信号一般为图3.5-3a所示的近似正余弦波,信号的周期为1个节距、幅值为1VP-P左右。由于输出信号Ua、Ub的幅值随着光栅的移动而改变,因此,很容易通过A-D转换等方法,将其转换成为数字量或进行脉冲细分处理,且其细分倍率可做得很高。例如,如将节距为0.02mm的光栅尺信号进行1024细分,其检测精度便可达到0.02μm,足以满足数控机床的高精度位置测量要求。
经过放大、细分处理后的线驱动差分输出信号如图3.5-3b所示,它是一组6相并行输出脉冲信号。光栅尺的线驱动输出接口通常采用26LS31、MC3487或同规格的集成线驱动芯片,信号输出符合RS422接口标准规范,输出接口电路如图3.5-4a所示。
经过放大、细分处理后的TTL电平输出通常为图3.5-3c所示的3相脉冲信号,输出接口采用类似于图3.5-4b的“推拉电路”。
5.常用产品
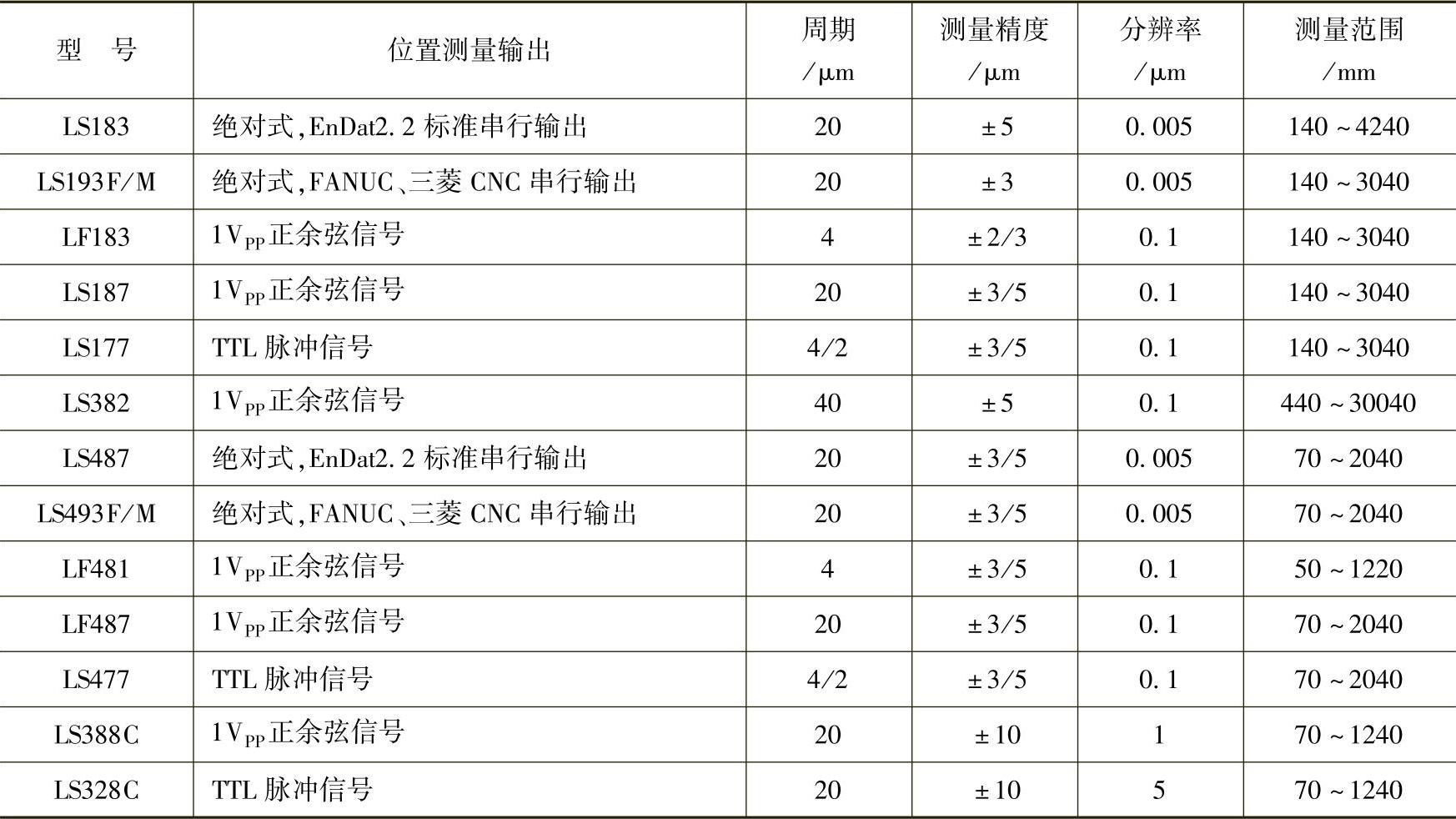
光栅产品以德国HEIDENHAIN公司最著名,其产品规格齐全,技术水平、市场占有率均居世界首位;此外,日本SONY、西班牙FAGOR等公司的产品在国内也有一定的销量。以HEIDENHAIN产品为例,该公司的光栅在结构上分为密封式与敞开式两类,其测量分辨率可达0.005μm、最大测量长度可达30m。
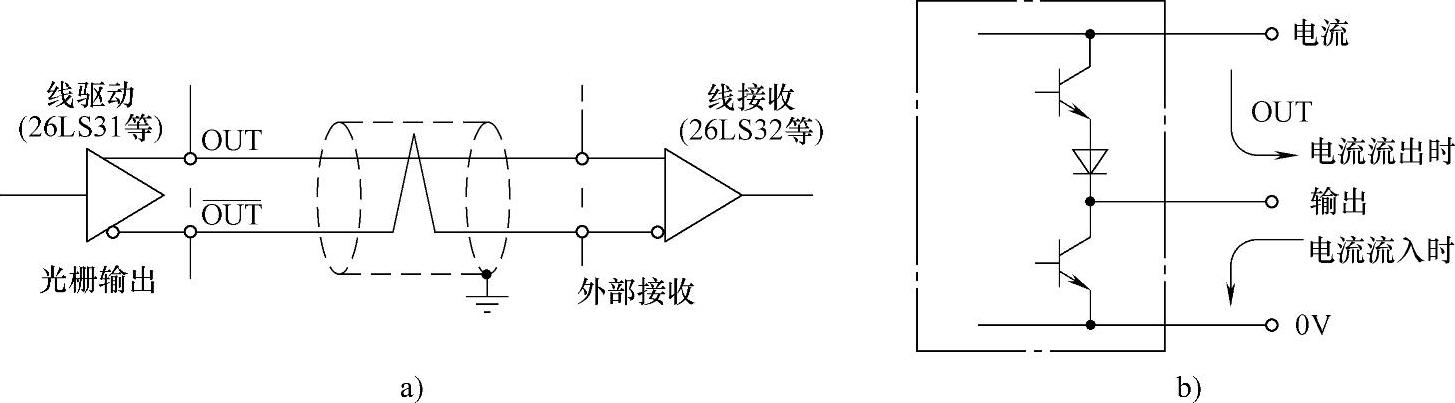
图3.5-4 光栅的输出接口
a)线驱动输出 b)TTL输出
数控机床常用的HEIDENHAIN常用光栅产品的主要技术参数见表3.5-1,此外,该公司还有LIP300、LIP400、LIP500系列敞开式光栅,LS600系列手动机床测量用光栅等产品。
表3.5-1 HEIDENHAIN光栅主要技术参数表