无刷控制器工作原理
自电动车用无刷电动机以来,其控制器发展分两个阶段:第一阶段为使用专用无刷电动机控制芯片为主组成的纯硬件电路控制器,这种电路较为简单,其中控制芯片的代表是摩托罗拉的MC33035;第二阶段是以MCU为主的控制芯片。在MCR版本的设计中,综合了模拟、数字、大功率MOSFET驱动等许多重要应用,结合MCU智能化控制,是一个非常好的设计。
下面以应用最广泛的以PIC16F72为智能控制中心的350W整机电路为例进行介绍。
该整机电路看起来很复杂,简化后,大体上可以分成五部分:电源稳压供应部分、信号输入与预处理部分、智能信号处理控制部分、驱动控制信号预处理部分、功率驱动开关部分。
下面先来看看此电路最核心的部分:PIC16F72组成的单片机智能信号处理控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其他电路就比较容易明白。该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的I/O口,其中第13脚是CCP1输出口,可输出最大分辨率达10bit的可调PWM信号,另有AN0~AN4共5路A/D(模/数)转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。内部软件资源将在软件部分讲解。
各引脚应用如下:
①MCLR复位/烧写高压输入两用口。
②模拟量输入口:放大后的电流信号输入口。单片机将此信号进行A/D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。正常运转时电压应在0~1.5V左右。
③模拟量输入口:电源电压经分压后的输入口。单片机将此信号进行A/D转换后判断电池电压是否过低,如果低,则切断输出以保护电池,避免电池因过放电而损坏。正常时电压应在3V以上。
④模拟量输入口:线性霍尔组成的手柄调速电压输入口。单片机根据此电压高低来控制输出给电动机的总功率,从而达到调整速度的目的。
⑤模拟/数字量输入口:制动信号电压输入口。可以使用A/D转换器判断,或根据电平高低判断,平时该脚为高电平,当有制动信号输入时,该脚变成低电平,单片机收到该信号后切断给电动机的供电,以减少不必要的损耗。
⑥数字量输入口:1+1助力脉冲信号输入口。当骑行者踏动踏板使车前行时,该口会收到齿轮传感器发出的脉冲信号,该信号被单片机接收到后会给电动机输出一定功率,以帮助骑行者更轻松地往前走。
⑦模拟/数字量输入口:由于电动机的位置传感器不同,其排列方法不同。该口的电平高低决定适合于哪种电动机,目前市场上常见的有120°和60°排列的电动机。有的控制器还可以根据该口的电压高低来控制起动时电流的大小,以适合不同的力度需求。
⑧单片机电源地。
⑨单片机外接振荡器输入脚。
⑩单片机外接振荡器反馈输出脚。
(11)数字输入口:功能开关1。
(12)数字输入口:功能开关2。
(13)数字输出口:PWM调制信号输出脚,速度或电流由其输出的脉冲占空比宽度控制。
(14)数字输入口:功能开关3。
(15)、(16)、(17)数字输入口:电动机转子位置传感器信号输入口,单片机根据其信号变化决定让电动机的相应线圈通电,从而使电动机始终向需要的方向转动。这个信号上面讲过,有120°和60°之分,这个角度实际上是这三个信号的电相位之差,和三相电一样,120°就是每个相位和前面的相位角相差120°。60°就是相差60°。
(18)数字输出口:该口控制一个LED指示灯,大部分厂商都将该指示灯用作故障情况显示,当控制器有重大故障时,该指示灯闪烁不同的次数表示不同的故障类型,以方便生产、维修。
(19)单片机电源地。(https://www.daowen.com)
(20)单片机电源正。上限是5.5V。
(21)数字输入口:外部中断输入,当电流由于意外原因突然增大而不在控制范围时,该口有低电平脉冲输入。单片机收到此信号时产生中断,关闭电动机。
无刷控制器接线操作方法如下:
1)找出转把线,连接好转把,如图5-34所示。
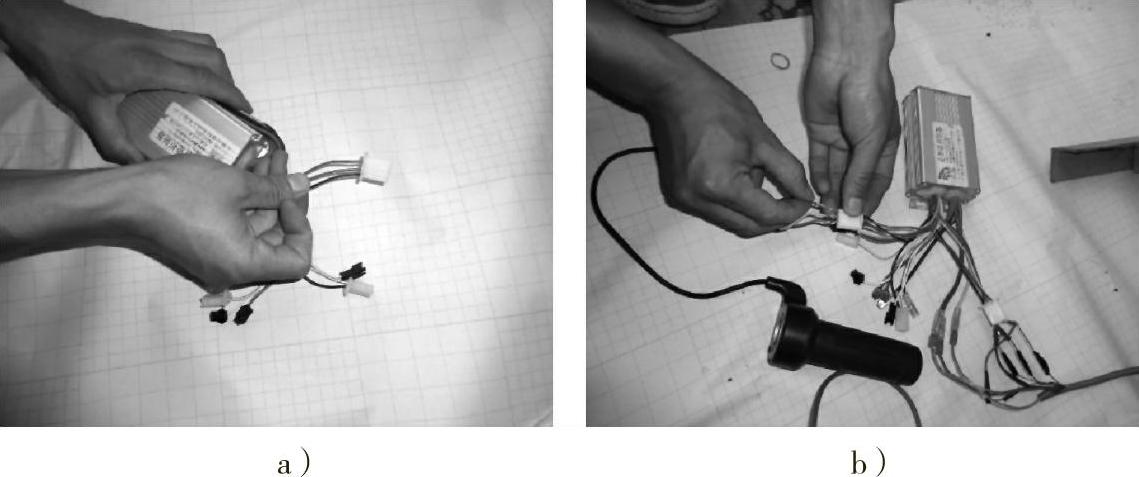
图5-34 连接转把
2)找出闸把线,连接好闸把,如图5-35所示。
3)找出电动机三根主相线,将其连接好,如图5-36所示。
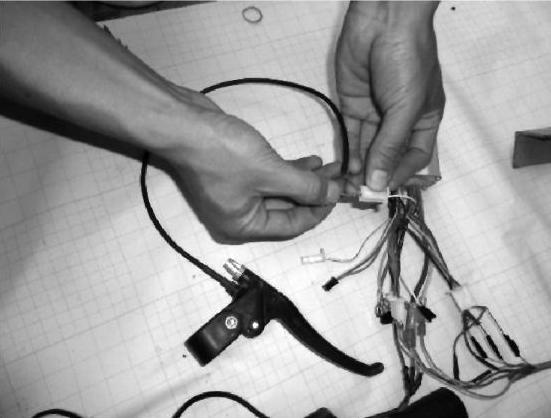
图5-35 连接闸把
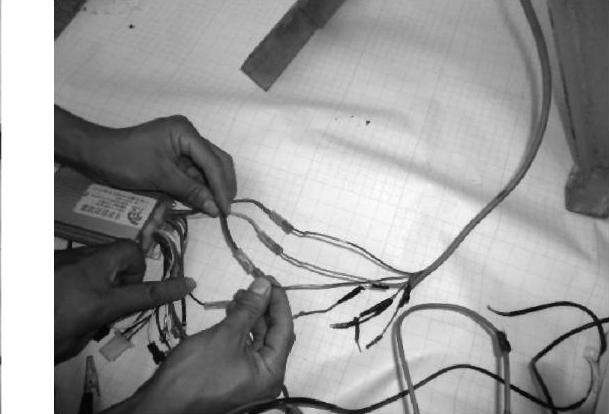
图5-36 连接电动机三根主相线
4)找出电动机5根霍尔细线。先接好霍尔红色正极和黑色负极,再接其中三根霍尔线,如图5-37所示。
5)将电池串联成48V,如图5-38所示。
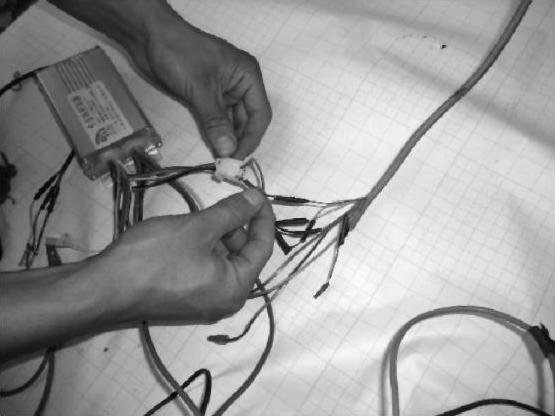
图5-37 连接霍尔细线
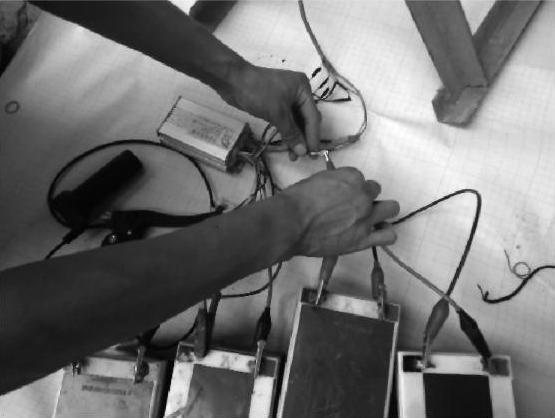
图5-38 将电池串联成48V
6)将电源锁线串联在电池正极上,如图5-39所示。
7)线连接好后转动转把,电动机慢慢工作,如图5-40所示。

图5-39 将电源锁线串联在电池正极上
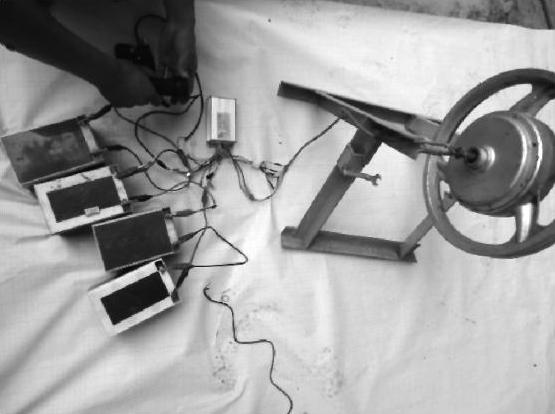
图5-40 转动转把后电动机慢慢工作
8)转动转把时若电动机倒转,可将控制器自学习线插上。左手转动转把,右手同时控制前闸把2s再松开制动,电动机和控制器相位匹配后自动会进入正转,然后拔下自学习线,电动机就可以正常工作,如图5-41所示。