技术与方法
第二节 技术与方法
应用CAS技术首先在术前获取并实现治疗区域脊柱的CT扫描三维图像重建,在手术中利用定位系统(3D示踪器)对手术刀或导航棒的位置进行实时跟踪,并将其位置和术前重建的三维图像共同显示在屏幕上,外科医师通过观察探针或者导航棒和脊椎的相对位置,在手术中不断调整进针路线,或通过机器人技术,根据从跟踪器中获取的信息,自动调整位置和方向,使得手术按照预先规定好的计划完成。手术导航系统强大的图像显示功能,提供了丰富的解剖结构信息,有助于脊柱手术质量的提高。
近年来,新型的计算机辅助导航系统可将患者的术前薄层CT扫描(可以0.8 mm)或MR扫描数据进行处理,使患者的骨骼扫描数据变成三维立体虚拟图像储存在计算机中。医师可在术前利用该计算机系统进行详尽的手术设计。术中应用光学定位系统,跟踪测量手术器械上的发光二极管或被动反射球的位置。由计算机测算手术器械与被操作的骨结构之间的位置关系,可以动态地显示手术器械的正确位置、前进方向和推进距离等,较虚拟透视系统更准确。这种新型系统已经广泛用于临床。其主要包括以下四个步骤。
一、数据采集
对患者手术部位进行高精度CT扫描,获得相应的数据。
二、术前计划
把CT数据以DICOM格式保存于CDR、数据磁带或网络输入导航计算机工作站,生成手术部位的各个断面图像和3D图像,主要包括脊椎、脊髓和肿瘤的三维重建,选择并确定拟使用的椎弓根螺钉的长度、直径、进钉点及其深度和角度。
三、配准
暴露手术野后,利用手术野中3D示踪器按照系统提示匹配相应的脊椎表面参考点,通过该步骤使实际的手术野与计算机根据术前CT数据的重建图像间建立对应关系。3D示踪器是一种能够实时定位手术器具、探针或内固定系统三维空间位置的一套装置,由几种技术装备组成,即:带编码器的机械臂,实时的超声系统,测定磁场阈值的磁力装置和光学摄像装置。3D示踪器的特点之一是能够弥补病人因为术中体位变化所造成的误差。由于术前和术中患者的体位不同,各椎节间会发生细微的位移,且配准的过程也存在着一定差异,导致术前计划中的虚拟图像和实际术野出现误差,该误差由计算机自动计算并提示。减少误差可以通过以下两个方面来实现:增加配准点,即由关键点配准改为表面参考点配准,或者采用单椎体配准。配准有实体配准(material fiducials)、解剖配准(anatomical fiducials)和表面定位三种方法:
1.实体配准(material fiducials) CAS要求CT扫描前在骨骼内植入螺钉等配准标记物,计算机可自动在CT影像上进行配准。术中通过3D示踪器对病人进行配准定位,在实际的手术野与CT图像间建立对应关系,其主要缺点是在CT扫描前植入螺钉等配准标记物。
2.解剖配准(anatomical fiducials) 当术中找到解剖植入点时,不再采用实体配准(material fiducials)。术前在CT影像上已确定解剖定位点,术中由术者再定位同一个点,实现从CT影像定位转变为术野定位,这称之为配对定位(paired-points matching),但是这方法没有实体配准(material fiducials)定位精确,而且高度依赖于术者的经验,实际操作起来较难。
3.表面参照点配准(surface-based fiducials) 是最精确的配准方法。首先,通过计算机建立三维骨骼模型,术者应用光标确定与骨皮质表面对应的CT阈值,骨表面的参考点被分为高于和低于阈值的两个区域;其次,在术中术者用3D探针在骨表面任意选定最大可能的20~80个参考点,表面参考点配准实现了从术野定位到3D模型表面的定位。该技术提供了精确定位,但是它需要把实体配准(material fiducials)和解剖配准(anatomical fiducials)作为第一步然后才能进行。
四、路线导航
配准完成且精度符合要求后,手术工具及椎弓根螺钉的位置被实时显示在屏幕上,按照术前计划中制定的手术路线进行螺钉植入和内固定。
CT介导的导航的优点是导航精度高,且在脊柱的一些特殊部位,比如颈胸交界或上颈段仍可以应用导航,另外还可以进行术前计划。其缺点在于,由于患者术前的CT和术中的体位不同,相应的脊柱序列可能发生改变,从而发生系统误差,这种情况在脊柱骨折的病例中尤其明显,解决办法包括实行单椎体配准和术中实施CT介导的导航。
下面我们以Sofamor-Danek公司开发的Stealth Station为例,详细介绍具体手术操作。
1.仪器和设备 Stealth Station(Sofamor-Danek,Memphis,TN)是一套不需要框架参照物的CAS系统,包括计算机、三维示踪器和特殊器械。Stealth Station用的是Silicon Graphics计算机,该计算机用于术前计划和术中导航(图19-1)。术中3D示踪器是一套光学系统,提供了图示的三种手术工具的术中定位(图19-2)。3D示踪器的最早版本是Flashpoint5000,最新的版本是HYBRID POLARIS。每种工具使用发光二极管,可被3D示踪器的红外线照相机侦测到,并连接到计算机工作站。图19-3示手术中的特殊器械工具,第一种工具是参照架通过钳子夹在椎体棘突上;第二种工具是一个指针,其指针尖端提供表面参照点的三维坐标;第三种工具用来定位手术钻头或钻头导向器。Sofamor-Danek公司开发的Stealth Station采用被动红外接收方式,3D示踪器被用来术中配准和导航,经过校准后该系统用于术中钻头尖端可视化定位和轴线可视化定位。

图19-1 Stealth Station的计算机工作站

图19-2 3D示踪器
术中3D示踪器配备3部红外线照相机Silicon Graphics(64M内存,1G硬盘,装有LEDs摄像头、键盘、鼠标、20英寸监视器、数字录音带的应用光驱)
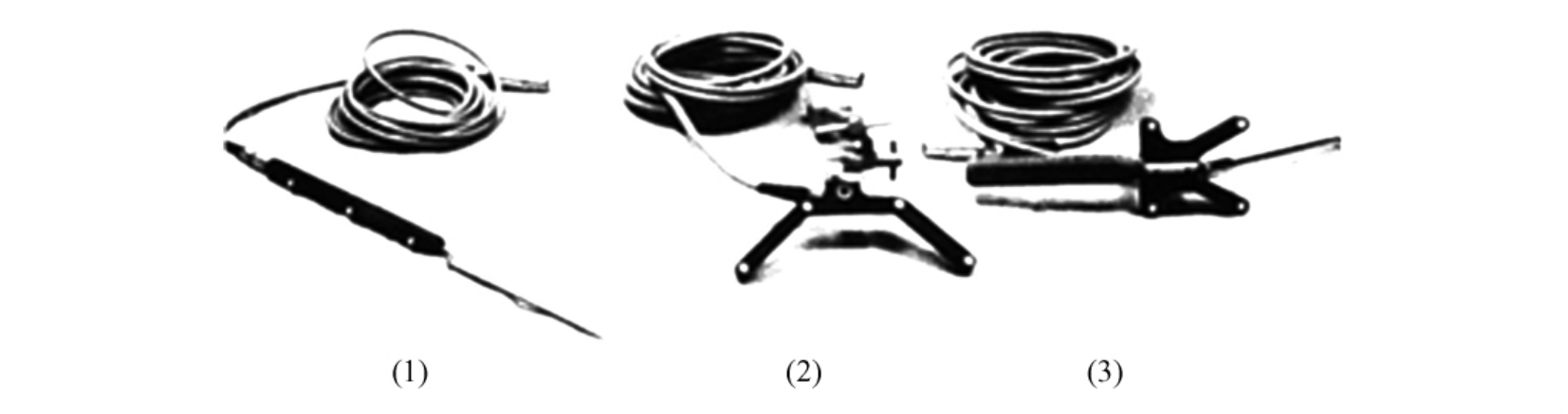
图19-3 术中特殊器械
(1)探针(2)参照架(3)钻头导向器。每种器械装有LEDs摄像头,与计算机工作站连接
2.术前准备 术前行CT扫描,推荐应用2mm层厚和2mm层间距对脊柱进行螺旋CT扫描,如以超过3mm层厚进行CT扫描得到的结果无法预料,而对于疑难病例推荐以1mm层厚进行CT扫描。为了减少病人的X线辐射,可以行3mm层厚CT扫描,而用1mm层厚重建,数据以DICOM格式通过Ethernet网络传输到计算机工作站。(https://www.daowen.com)
椎体的3D模型由术前CT扫描获得,该步骤由一个半自动分节程序来执行,术者几秒内根据CT密度阈值将椎体表面分为高密度区和低密度区两部分。
为了完成术野和CT影像间的配准,图示的计算机工作站可以提供应用界面帮助术者在术前根据CT三维模型在椎体后部确定4~6个解剖点。手术者确定椎体后部表面参照点的三维坐标,从而有利于术中确定螺钉入点和方向、螺钉的尺寸和长度。该步骤需要在术前即进行并在术中不断得到矫正。之后计算机工作站建立通过螺钉轴线的虚拟矢状面、额状面和横断面的图像,利于术者检查螺钉位置是否正确,特别是在矢状面上。这些步骤可以反复进行直到术者满意为止,这一过程大约需要5分钟。如果术者很有经验,该步骤可以跳过直接进行术中导航。
3.术中操作 进行术中导航前有几步工作要做,第一步将参照架固定在椎体上,以弥补椎体旋转或移位造成的差异,为此我们强烈建议不要把参照架连在不同节段。校准指针或钻头导向器位置,防止有误差发生。如果误差在1.0mm以上,需要重复校正,如果没有校正成功就需更换器械。用装有LEDs的3D示踪器来确认4~6个解剖配准(anatomical fiducials)点,这些配准点的三维坐标需要与术前CT图像上获得的配准点坐标相一致,以弥补期间椎体移动造成的误差(图19-4)。
应用3D示踪器获得椎体后部20~80个点的云图,应用表面参照点配准(surface-based fiducials),要求这些点的云图与CT模型表面分区的参照点相对应。采集这些点时计算机软件得出的数值需达到期望的精确度,当达到这一要求后采集过程即终止。通常该过程需要4分钟,误差应低于2mm。术野和CT影像间误差平均低于2.0mm时导航能够顺利进行,当误差超过2mm时计算机提示操作失败,因此需要进行解剖配准(anatomical fiducials),以校正CT影像上的参照点的坐标。我们强烈建议不要把某一椎体获得的配准结果应用到另一节段椎体。每一椎体都要通过CAS系统进行确认,因为即使相邻两个脊柱节段也不会构成一个整体。
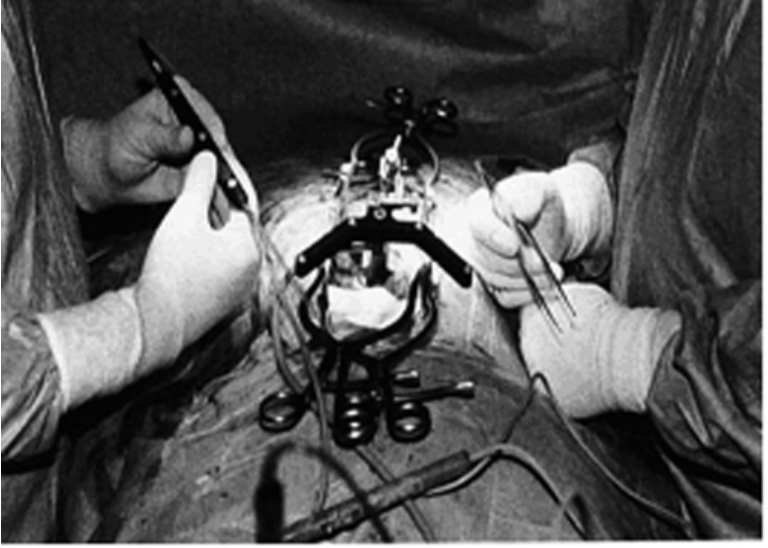
图19-4 应用3D示踪器进行解剖配准参照架固定于手术椎体的棘突上,左侧为3D示踪器,用于术中椎体后部的解剖配准
如果上述步骤顺利的进行,CAS系统准备进行导航和辅助钻孔。术者一边手持装有导向器(配有LEDs摄像头)的标准手术钻头,一边看着工作站的荧屏(图19-5、6)。如果CAS按照术前计划进行,荧屏会提示钻头的最佳位置与实际位置是否出现误差。如出现误差,术者会重新审视钻头导向器的CT重建影像。计算机辅助导航其精确度通常不超过1mm(图19-7~9)。

图19-5 术中CAS系统的应用(一)
术者手持装有导向器(配有LEDs摄像头)的手术钻头,同时注视荧屏将钻头钻入椎弓根
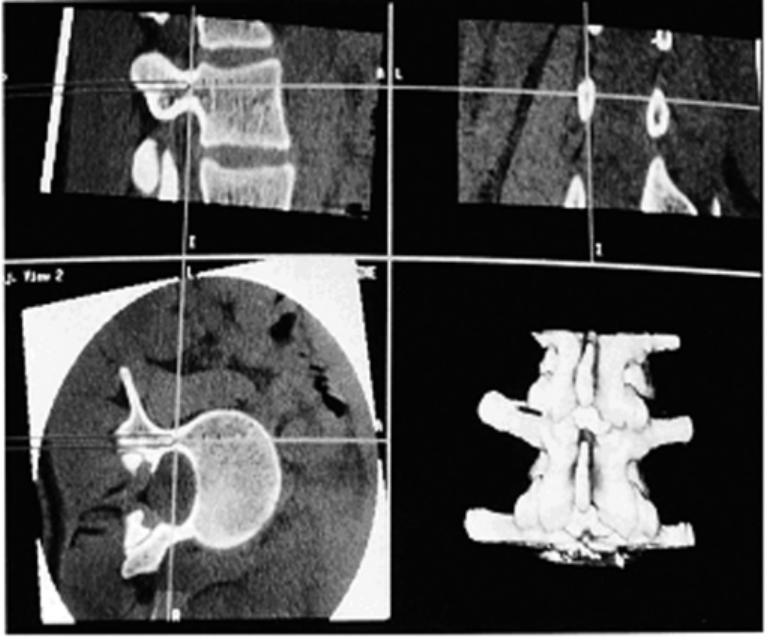
图19-6 术中CAS系统的应用(二)
计算机工作站显示的钻头的最佳位置与实际位置的误差,横断面、矢状面、额状面和3D重建图像实时提供椎弓根植入螺钉的精确导航
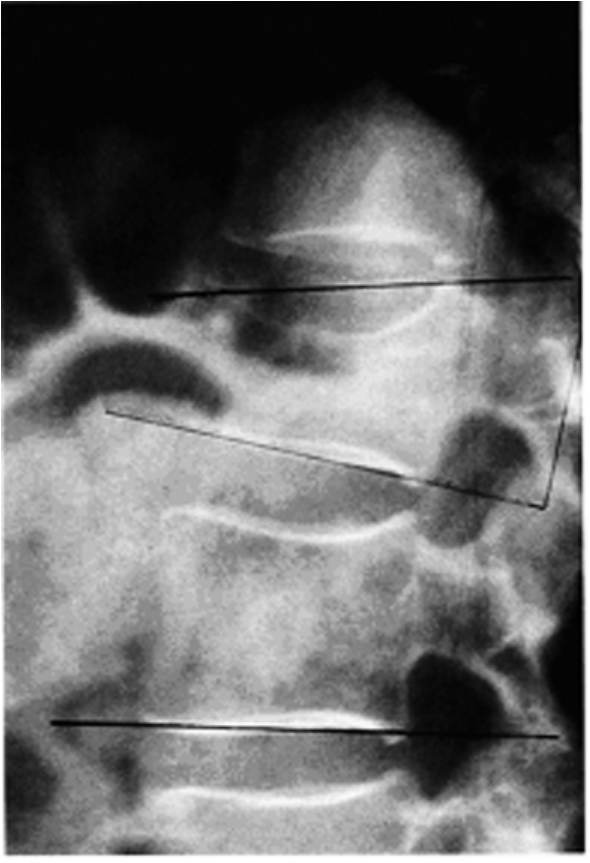
图19-7 L1压缩骨折病人
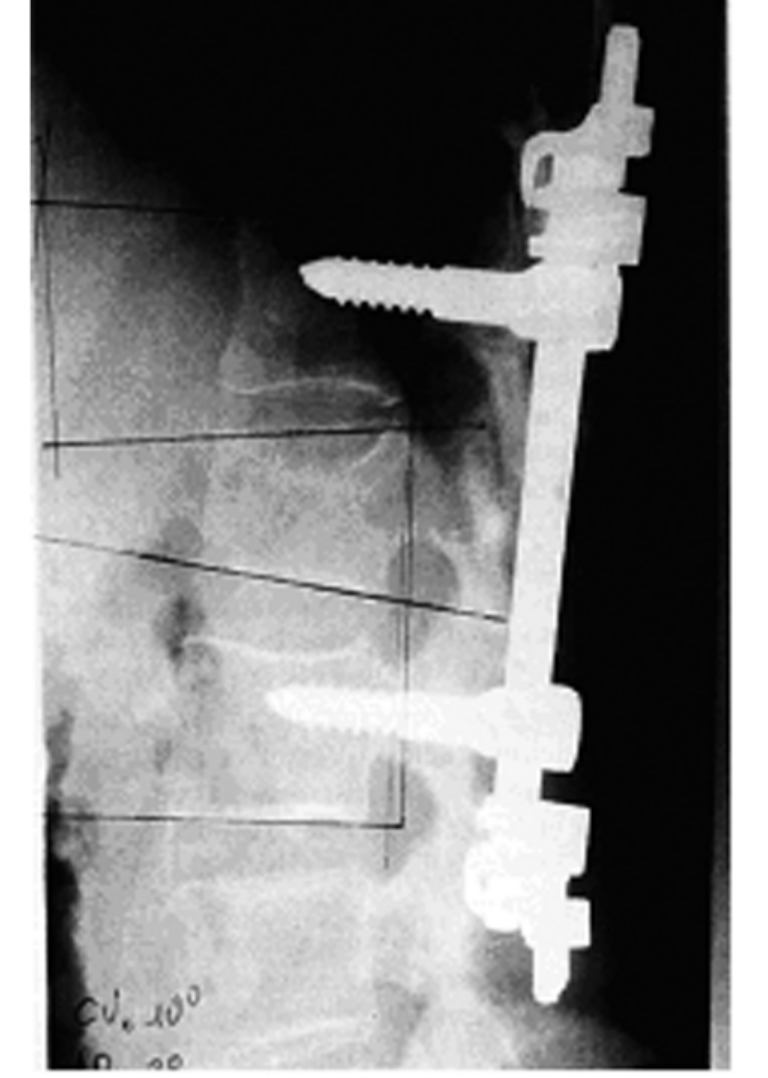
图19-8 L1压缩骨折术后侧位片
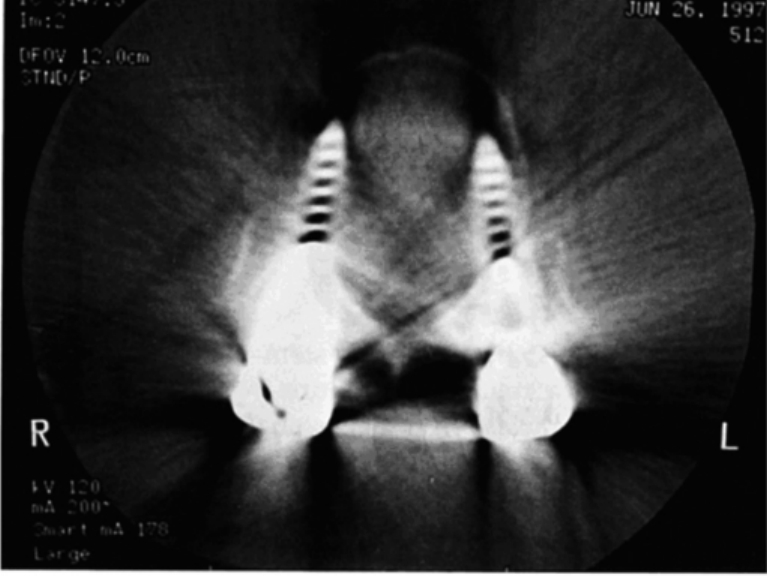
图19-9 术后CT扫描
术后CT扫描检验CAS导航系统的精确性,椎弓根螺钉的长度和位置极佳