4-139 全速段智能巡航控制系统(ICC)怎样实现自动跟车?
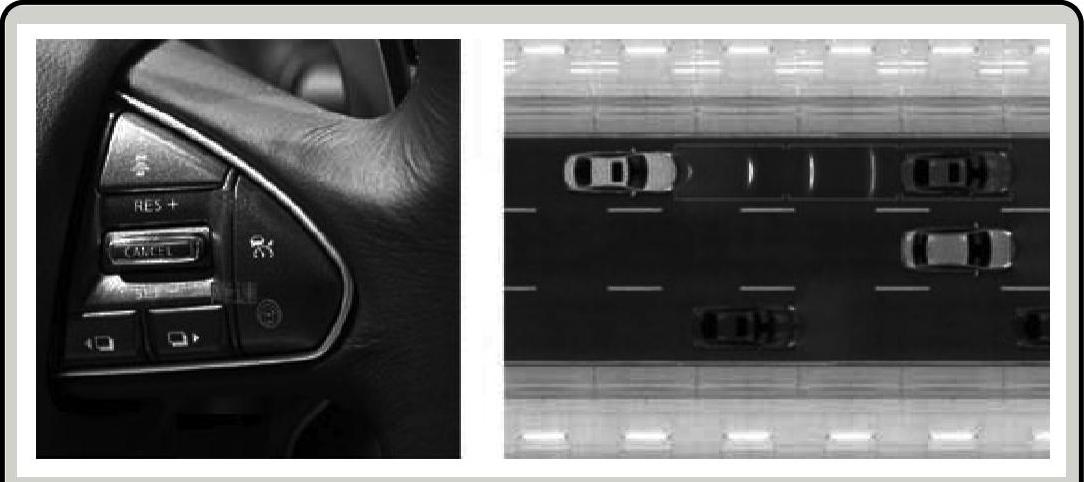
英菲尼迪的全速段智能巡航控制系统能够主动保持与前车的距离。在车速超过40km/h时,该系统启动,驾驶人即可设定与前车在0~145km之间的动态车距(图4-61)。帮助汽车主动制动,值得一提的是,这一系统可以将车速降低到0的状态。

图4-61 巡航控制的设定
若前车明显减速,ICC便会主动把车速降低到与前车一致,并以相应的速度继续定速巡航;而当前车再次加速前进时,ICC又会控制车辆按照预先设定的车距前行。如果在正常巡航状态下,旁边车道有一辆速度很慢的汽车强行加入,ICC也会立刻做出紧急制动的反应,将车速降至与插入车辆相同的速度,并保持先前设定好的安全车距。当加入车辆驶离车道之后,ICC同样会控制车辆恢复先前的巡航状态。图4-62所示为设定了65km/h的行驶速度。(https://www.daowen.com)
图4-62 设定巡航速度65km/h