5-168 自主驾驶能干什么?
自主驾驶功能激活后,驾驶人的座椅将会自动后移,并向右侧转动45°,调整为休息状态(图5-1),其还可以使用可移动平板电脑开展其他活动,例如,与外界通信或完成以往由调度员完成的任务,甚至是预定休息区的停车位和预定餐食,但驾驶人不能睡觉。因为未来卡车2025的掌控者仍然是驾驶人,自主驾驶模式下驾驶人可以随时转为手动操作,这也是德国法律所要求的。

图5-1 驾驶人的休息状态
在此期间卡车则会在高速公路上自主行驶,根据车速限制和其他车辆的状态调整自身行车状况,遇到突发状况车辆会自动调整行车轨迹,保证自身的安全。目前该项技术仅能在未来的高速公路上使用。
该技术是基于车道保持辅助系统、车距控制系统、紧急制动(ABA)系统、Stop-and-Go Assist堵车自动起动和停止系统、预测巡航控制系统,即以动力总成预控制系统(PPC)为基础,配合车辆周围的雷达传感器和全景多功能摄像头来实现的。
梅赛德斯-奔驰未来卡车2025配备的立体摄像头可识别单双车道、人行道、移动和静止的物体以及监视范围内的所有物体,同时路面情况也在监测范围之内。该立体摄像头可辨识所有与背景影像形成对比的物体,从而能够精确地测量出间距。此外,前置立体摄像头还能够捕捉交通标志的信息。除物体和距离识别外,立体摄像头的另外一个重要功能是识别车道标记,引导自主车道驾驶。
如图5-2所示,前置雷达传感器的扫描距离为250m,扫描范围为18°。近距离传感器的扫描距离为70m,扫描范围为130°。位于风窗玻璃后车内仪表板上方的立体摄像头也可以扫描车辆前方的路面。立体摄像头的扫描距离为100m,水平扫描范围为45°,垂直扫描范围为27°。该系统中还配有一个应用于动力总成预控制系统(PPC)中的三维数字地图,使得车辆可实时、全面地掌握道路的轨迹和周边地形。(https://www.daowen.com)
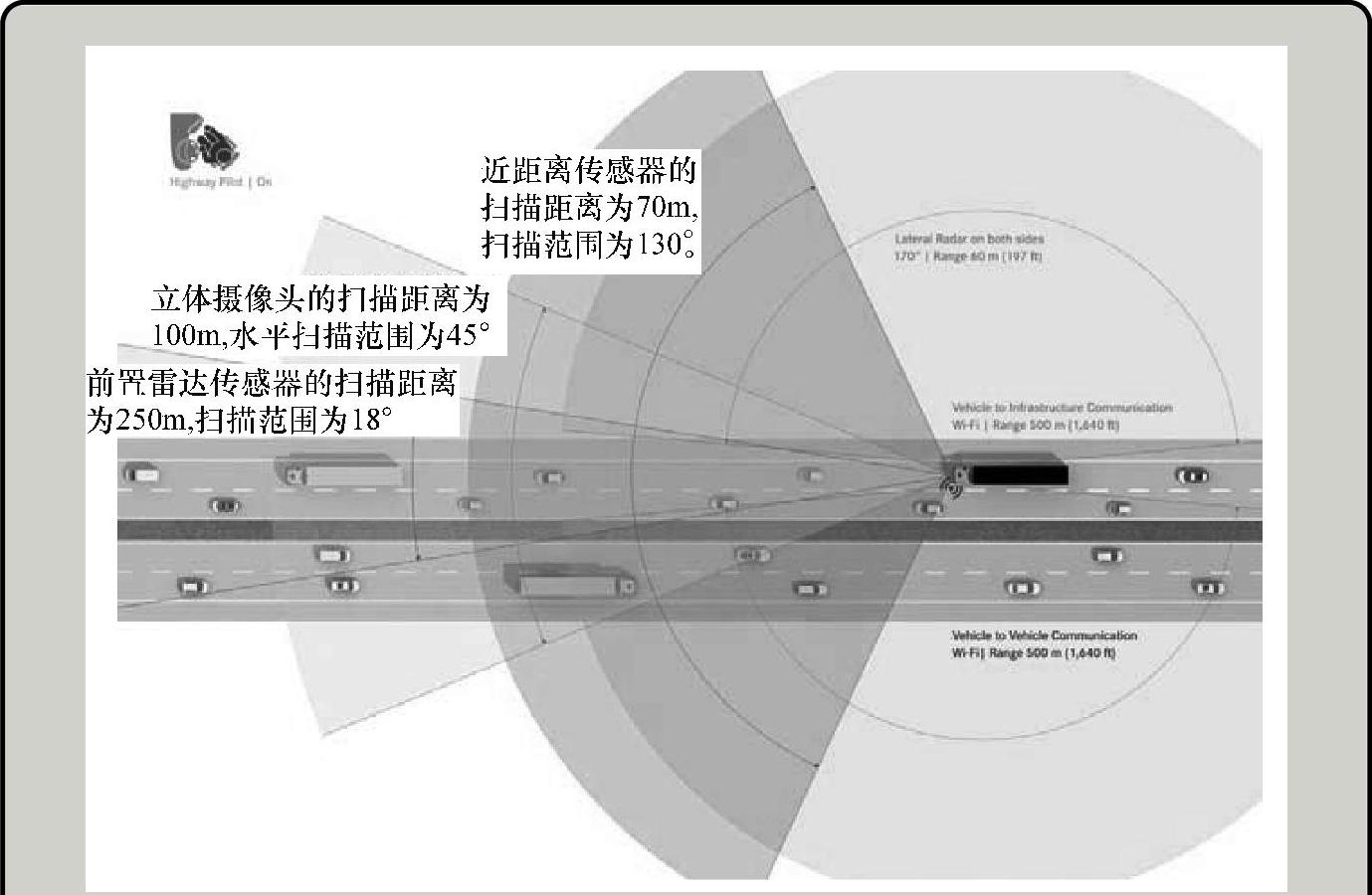
图5-2 各传感器的工作范围
“高速公路领航”功能与V2V(车与车)和V2I(车与交通设施)网络的互通(图5-3)。在不久的将来,每辆配备该系统的车辆都可以向周边持续发送CAM(Corporate Awareness Message)信息,以告知车辆的存在。信息内容包括车辆位置、车型、尺寸、行驶方向、速度以及任何有关加速和制动的操作信息。信息发送的频次取决于车速和运动变化的强度,最低为1次/s;当运动变化明显时,信息发送的频率可达10次/s。
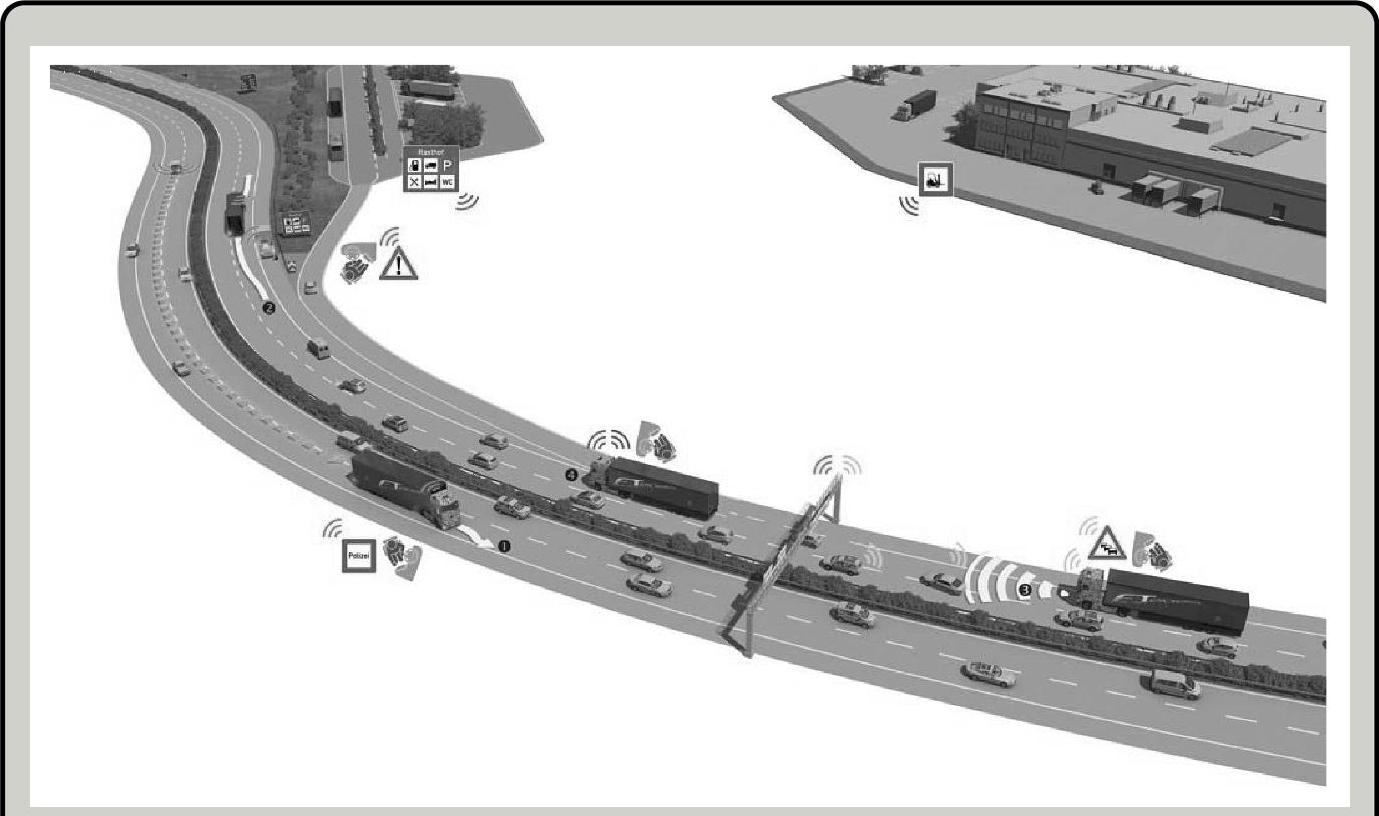
图5-3 高速公路领航功能