11.6.1 控制系统总体方案设计
2025年09月21日
11.6.1 控制系统总体方案设计
机器人本体硬件系统主要的组成部分有:主控制器、电动机驱动器、传感器、状态设置按钮、状态显示器、工作状态检测器与电源模块等。这几个模块在单片机的控制下,相互协调工作,保证了清洁机器人各种功能的实现,室内智能清洁机器人硬件系统框图如图11-36所示。
(1)主控制器 主控制器主要由单片机STC89C52RC组成,它的主要功能是完成主控程序与其他各模块的接口,是程序运行的载体并实现对整个机器人的控制。
(2)电动机驱动器 电动机驱动器主要由行走电动机驱动器、毛刷电动机驱动器和吸尘电动机驱动器组成,其中行走电动机驱动左右行走轮从而带动清洁机器人的运动,毛刷电动机和吸尘电动机负责清洁除尘工作。
(3)传感器 传感器主要由红外避障传感器、红外防跌落传感器、自寻充电站用的调频红外传感器、碰撞传感以及霍尔速度传感器组成,这些传感器用来表示机器人的所处状态与运动情况。
(4)状态设置按钮 状态设置按钮主要负责机器人的起、停、工作状态设置等功能。
(5)工作状态显示器 工作状态显示器主要用于显示机器人当前工作状态。
(6)工作状态检测 工作状态检测主要是用AD检测电池电压、充电时充满检测和过流异常检测等,通过这些检测保证机器人正常工作。
(7)电源模块 将镍氢电池的24.4V电压转换为稳定的5V、9V等电压供单片机、传感器以及其他模块使用。
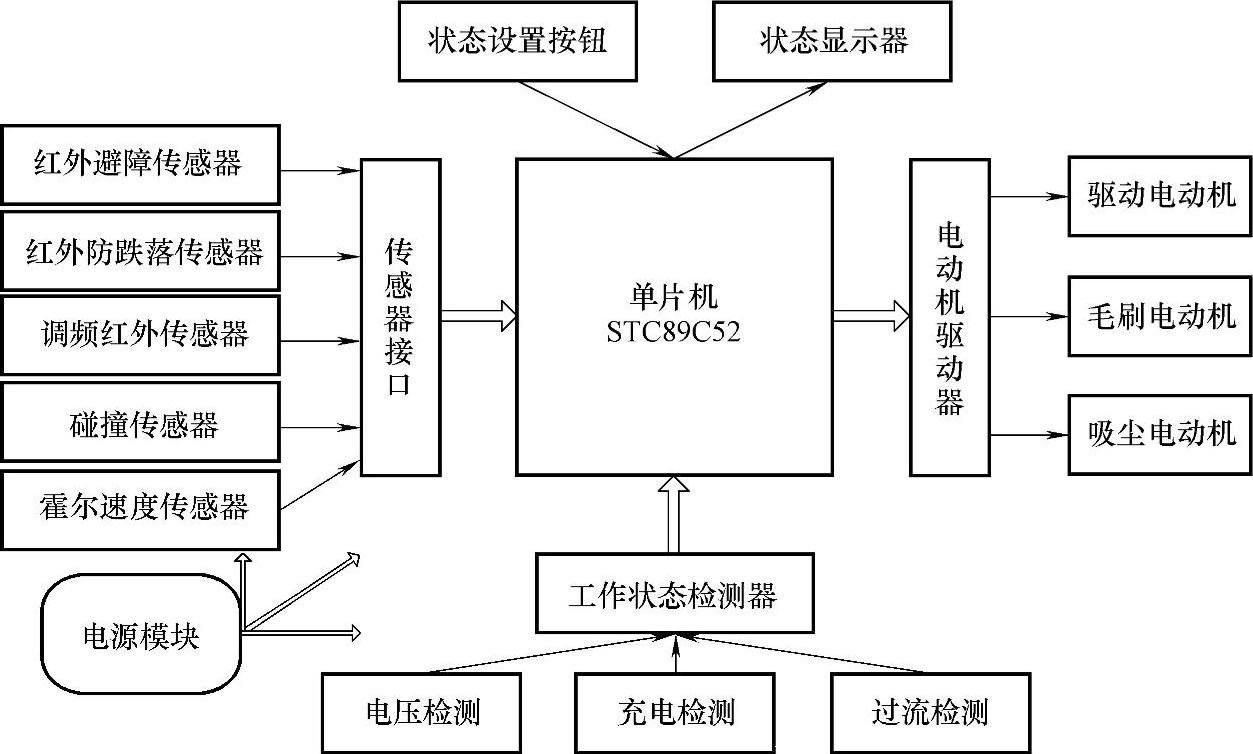
图11-36 室内智能清洁机器人硬件系统框图