11.6.2 硬件系统设计
1.主控电路单元
清洁机器人以STC89C52单片机为控制核心,主要完成的任务有:接收前向通道(障碍检测传感器、台阶检测传感器和霍尔速度传感器等)传来的数据,综合处理;驱动左右轮并实现调速;控制清扫、吸尘机构,完成各种底层控制动作;在LCD上显示机器人运行状态。
作为主控芯片,STC89C52在整个控制系统中占据着核心的地位,与其他各部分电路的关系为:通过各个传感器接收外部环境的状态信息;通过两路PWM信号给电动机提供电压,控制轮子的速度和方向;由I/O接口信号控制晶体管进而控制继电器驱动清扫、吸尘电动机;通过捕获两个霍尔传感器的脉冲信号,检测轮速;通过多个I/O接口控制LCD显示、LED指示灯和按键等。
2.输入输出模块
输入输出系统主要实现用户和机器人之间的人机交互功能,既要方便用户操作,又要满足用户要求。输入部分包括按键控制;输出部分包括LCD显示和发光二极管状态指示以及声音报警输出。
(1)键盘输入电路 机器人上配置了四个按键可供用户进行操作。一个功能键,两个选择键和一个确定键。通过这四个按键初步确定机器人可以实现三种功能,通过功能选择键进行切换:第一种设定和显示当前的时间;第二种是设定定时自动工作的时间,机器人到了这个设定的时间就自动开始工作;第三种是对机器人清扫方式(螺旋式、往复式等)的设定。
键盘有独立式和扫描式,扫描式比较节省I/O接口,但由于按键数量只有四个,所以选择较简便的独立式键盘,其电路如图11-37所示。每个按键接一个10kΩ的上拉电阻,平时都为高电平,当有键按下时,转为低电平,单片机通过扫描高低电平就可以知道哪个键被按下。
(2)液晶显示模块电路 清洁机器人上选择通用的1602液晶显示模块。1602为字符型液晶模块,可以用来显示2行每行16个点阵字符。使用时将1脚接地,2脚接+5V,其他引脚接至单片机的I/O接口,1602LCD电路如图11-38所示,单片机就可以通过数据线和控制线将要显示的数据显示在LCD上。
(3)状态指示灯和蜂鸣器电路 清洁机器人上有一个LED的状态指示灯和一个蜂鸣器,用于指示机器人的工作状态。LED指示灯使用一个共阴极的两脚变色发光二极管,其原理相当于将两个LED的阴极连在一起。LED和蜂鸣器共使用一个晶体管驱动。正常工作时,LED1的左半部分发光,表示机器人工作正常,当工作异常时,单片机发出信号使晶体管工作,驱动LED1左半部分也工作,同时驱动蜂鸣器发出警报声。具体驱动电路如图11-39所示。
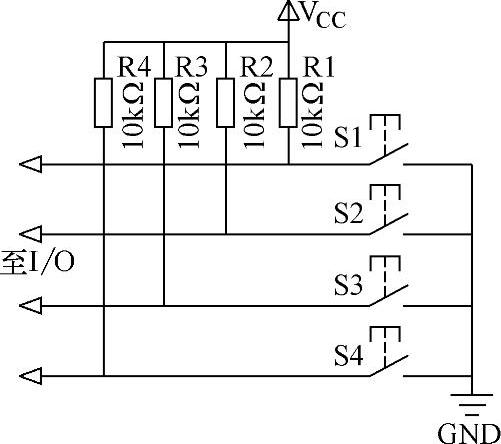
图11-37 独立式键盘电路
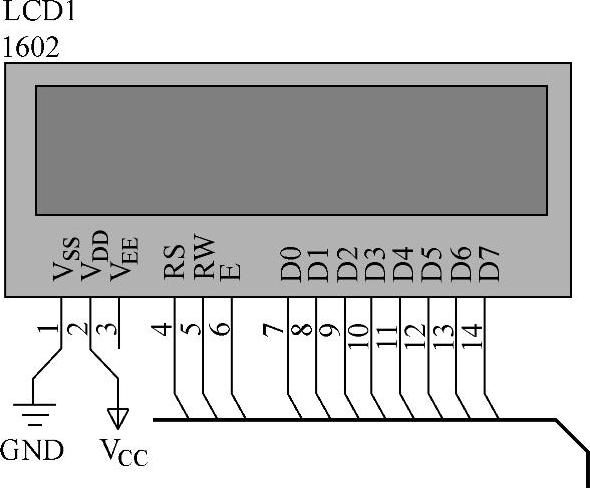
图11-38 1602LCD电路
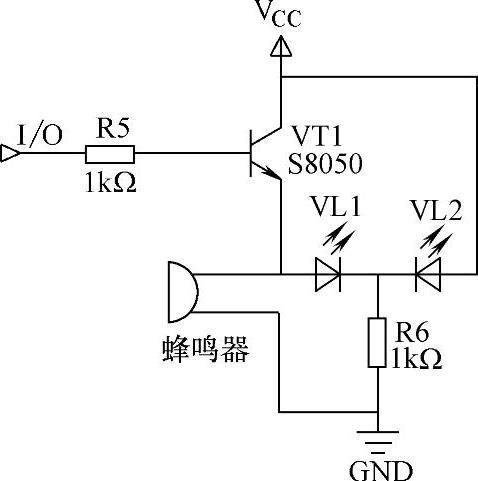
图11-39 状态指示灯和蜂鸣器电路
3.执行机构控制电路
清洁机器人上共有5个电动机,分别为左右轮驱动电动机、左右边毛刷电动机和吸尘电动机。其中左右轮驱动电动机通过L298芯片电路控制正反转,通过PWM实现调速;左右边毛刷电动机和吸尘电动机通过继电器控制,不实现调速。
(1)左右轮电动机驱动电路 清洁机器人上的左右轮驱动电动机均为直流电动机,其型号为RK-370。STC89C52单片机本身硬件不带PWM模块,用软件模拟方式来实现,可以通过利用STC89C52其中一个定时器来产生两组PWM波,经驱动电路L298N来驱动左右轮电动机。采用大功率直流电动机驱动电路,该电路采用大功率电动机专用驱动芯片L298N,驱动电流可以达到2A。续流二极管采用IN5822。逻辑部分电源使用直流5V,驱动部分电源使用直流9V。L298N电动机驱动电路如图11-40所示。
L298N内部包含4通道逻辑驱动电路。是一种二相和四相电动机的专用驱动器,即内含两个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电动机。1脚和15脚可单独引出连接电流采样电阻器,形成电流传感信号。L298N可驱动两个电动机,OUTI、OUTZ和OUT3、OUT之间分别接两个电动机。5、7、10、12脚接输入控制电平,控制电动机的正反转,ENA、ENB接控制使能端,控制电动机的停和转。
(2)清洁机构电动机驱动电路 清洁机构的边刷电动机和吸尘电动机都是由继电器驱动的,单片机的I/O接口只需给出一个控制信号,经晶体管放大后驱动继电器,常开接口闭合就可以驱动电动机工作。具体电路如图11-41所示,此种驱动方式简单实用。
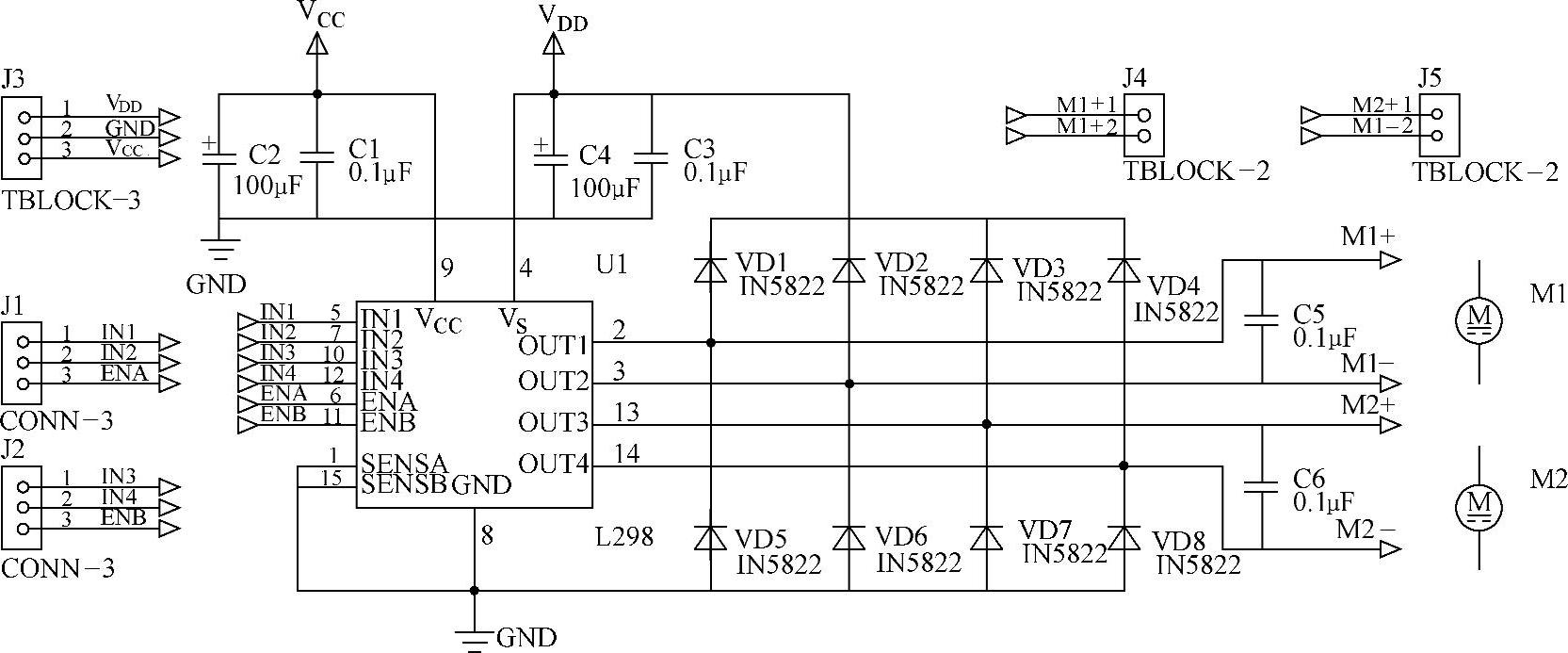
图11-40 L298N电动机驱动电路
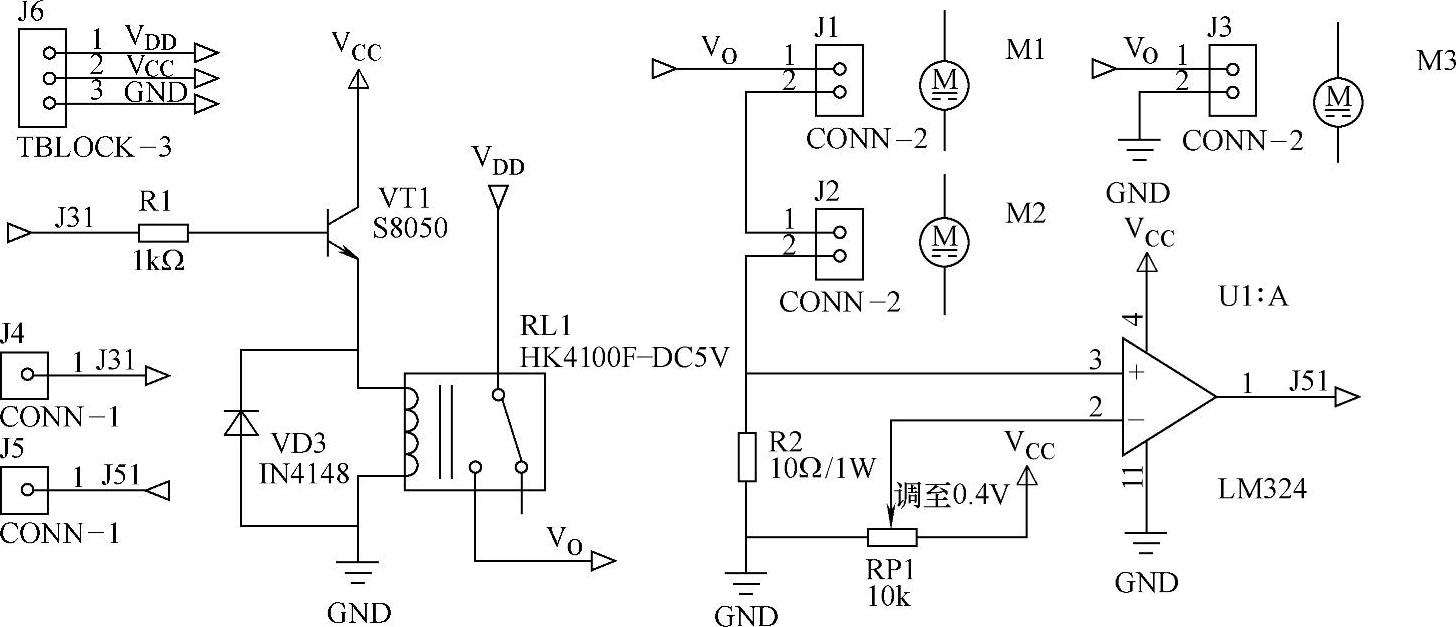
图11-41 清扫机构电动机驱动电路
需要注意的是边刷电动机M1、M2串联接入电路中,因为这两个电动机并不需要很高的电压和转速,经过实验发现串联后转速合适。与这两个电动机同时串联在一起的还有功率电阻R2,取值为10Ω,正常工作时电流约为30mA,根据欧姆定律,其两端电压为0.3V。当边刷电动机被各种线或其他杂物缠住时,电路工作电流就会增大,R2两端的电压也会增大。利用这一特性,采集R2端的电压与一固定电压0.4V比较,就可以检测电动机是否工作正常。图中LM324运算放大器被接成一个比较器,电动机正常工作时其输出为低电平;当R2端电压高于0.4V时,其输出为高电平。根据此信号,单片机就可得知电动机的工作状态,在电动机工作异常时给出控制信号控制继电器断开,保护清洁机器人。
4.传感器检测电路
清洁机器人上安装有多种传感器:各种红外线传感器、碰撞传感器和霍尔速度传感器。这些传感器协调工作,保证了机器人对外界环境和自身运动状态的判断。
(1)传感器布置 传感器网络共有4个周边红外线避障传感器、3个底盘红外线台阶检测传感器、2个调频红外线传感器、2个碰撞传感器、2个霍尔转速传感器以及1个电动机过流传感器、1个充电电源检测传感器、1个电池充满传感器和一个AD。其布置如图11-42所示。
(2)红外线避障传感器
1)简单红外线避障传感器电路。精度要求一般的红外传感器可以采用如图11-43所示的电路进行设计。在电路中,采用了常用的普通红外发射管和接收管,红外发射管与200Ω电阻串联发射红外线。当前方有障碍物时,可以将红外线反射后进入红外接收管,使之导通,通过比较器,Out端的电平发生改变。图中的可调电阻RP1可根据需要调节红外检测的灵敏度。
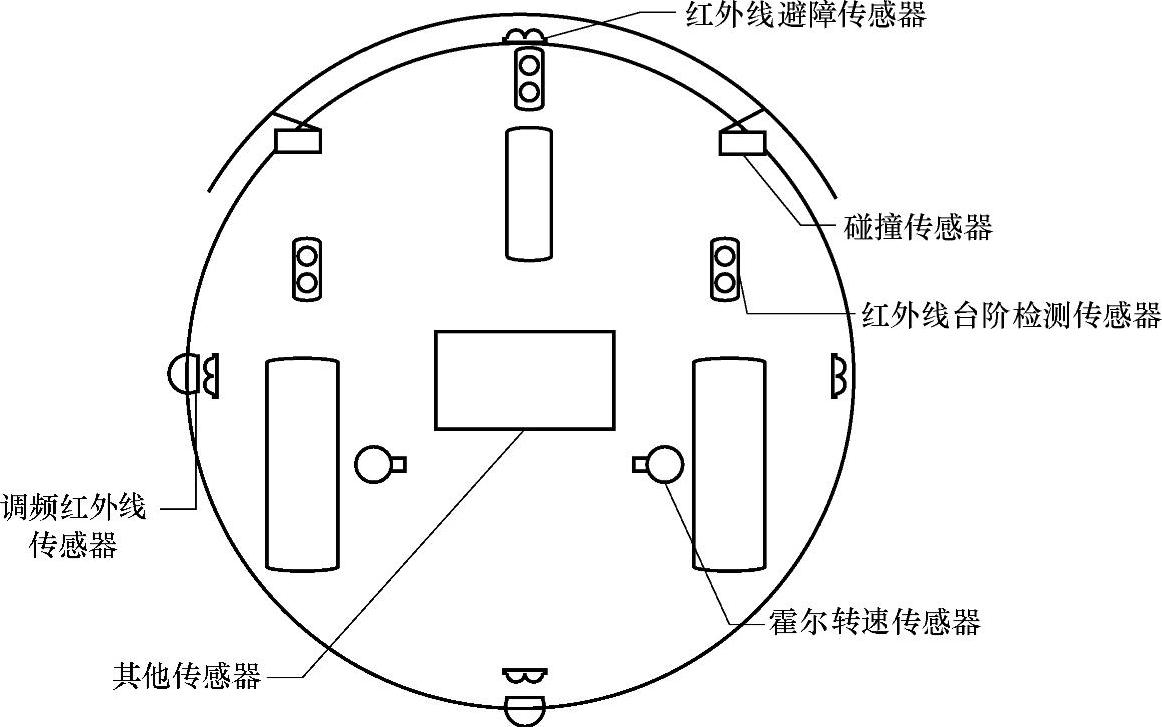
图11-42 传感器布置图
该电路的最大缺点是易受干扰。实际应用分析表明,干扰主要来源于两个方面:一是红外接收管受环境,特别是阳光的影响较大,严重时甚至无法完成相应的探测;二是即使在外界光比较均匀的环境下,也会因为比较器在临界状态下的输出存在抖动而带来干扰。所以需采取必要的抗干扰措施。采用调制信号的红外波便是有效的措施之一。
2)红外线避障传感器的改进设计。为了进一步消除外界环境对传感器的影响,可以将原电路改为只对调制频率固定的红外光才起作用的红外接收电路。在改进电路中,使用了LM567芯片。LM567为锁相环音频译码电路,它在电路中的功能是作选频用,即只有当输入信号的频率和电路自身的振荡频率相一致时,电路输出低电平。改进的电路如图11-44所示。
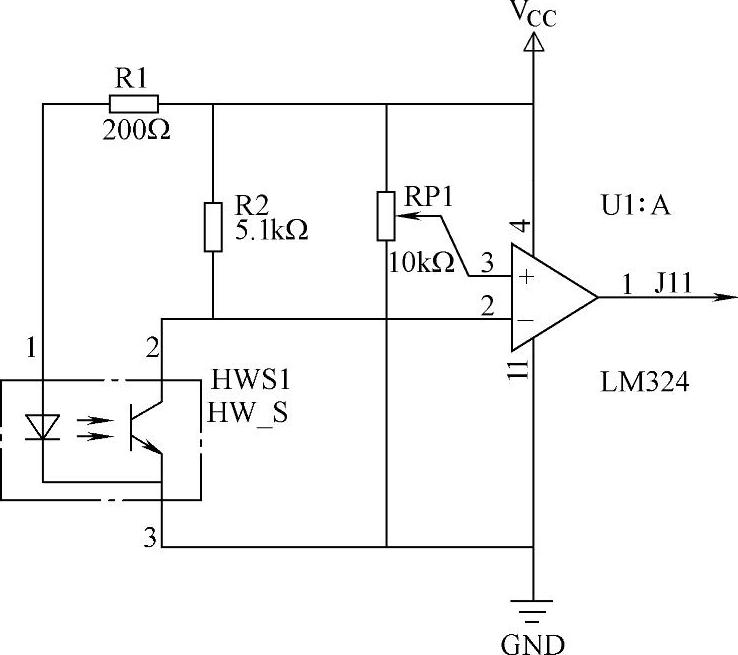
图11-43 简单红外避障传感器电路
LM567使用方法为:5、6脚外接的电阻和电容决定了内部压控振荡器的中心频率f 1,f 1=1/(1.1R5C4)。其1、2脚通常分别通过一个电容器接地,形成输出滤波网络和环路单级低通滤波网络。2脚所接电容决定锁相环路的捕捉带宽,电容值越大,环路带宽越窄。1脚所接电容的容量应至少是2脚电容的2倍。3脚是输入端,要求输入信号≥25mV。8脚是逻辑输出端,其内部是一个集电极开路的三极管,允许最大灌电流为100mA。LM567的工作电压为4.75~9V,工作频率从直流到500kHz,静态工作电流约8mA。
LM567的内部电路及详细工作过程非常复杂,这里仅概述其基本功能。当LM567的3脚输入幅度≥25mV,频率在其带宽内的信号时,8脚由高电平变成低电平,2脚输出经频率/电压变换的调制信号;如果在器件的2脚输入音频信号,则在5脚输出受2脚输入调制信号调制的调频方波信号。在图11-44的电路中利用了LM567接收到相同频率的载波信号后8脚电压由高变低这一特性,来形成对控制对象的控制。
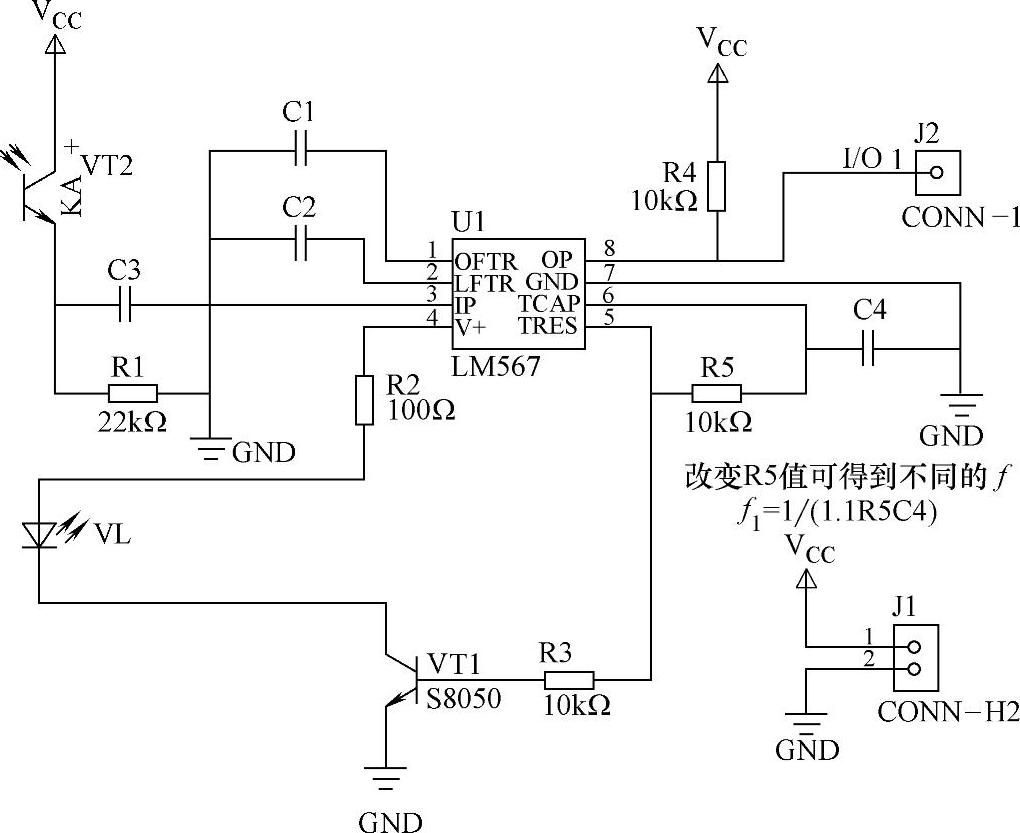
图11-44 改进的红外避障传感器电路
本红外线传感器电路的原理为:LM567芯片5脚输出的振荡信号经晶体管功率放大后,推动红外发射二极管VL1向外发射红外线。当前方没有障碍物时,红外接收管Q1接收不到VL1向外发射后经障碍物反射回的红外线,LM567的3脚无信号输入,8脚为高电平。当前方有障碍物时,Q1接收到经障碍物反射回的红外线,Q1和R1导通,LM567的3脚变为高电平,由其内部处理后使其8脚输出低电平。由此可以根据LM567的8脚电平高低来判断传感器前方是否有障碍物。为了防止左右传感器信号相互干扰,改变R5或C4的值可得到不同的信号频率。图中,f1=1/(1.1R5C4)=909Hz。
基于LM567的改进后的传感器不仅能排除环境光线的影响,还能排除红外传感器间的干扰。
(3)红外台阶检测传感器 红外台阶检测使用集成的红外传感器,外形如图11-45所示。其引脚定义为:1脚电源地,2脚电源正,3脚信号输出端。当传感器前方没有物体时,输出高电平,有物体时输出低电平。使用时不需要再外接元件,只需要给其提供+5V的电源就可以工作,但有效检测距离较近,比较适合于安装在机器人底盘,用于台阶的检测。
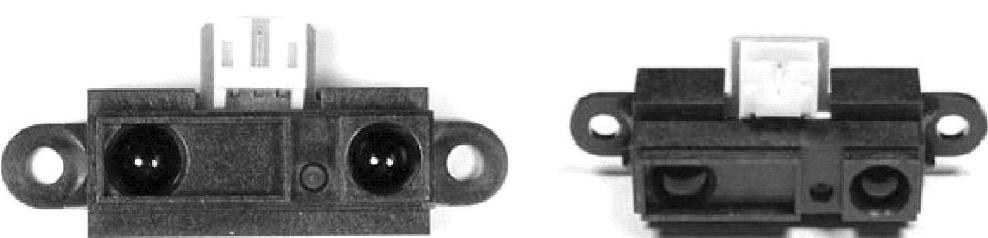
图11-45 集成红外台阶检测传感器外形图
机器人底盘上共使用了三个集成的红外传感器,分别安装在两个驱动轮的前端和随动轮的前端,三个传感器的输出信号相或,这样只要其中任意一个传感器检测不到地面(遇到有台阶情况),输出即为高电平,单片机检测到这个高电平就立即停止前进,防止跌落。具体电路如图11-46所示,或门使用两输入端四或门芯片7432。
(4)碰撞传感器 在实际应用中,红外避障传感器探测的范围存在盲区,因此在机器人前端设计了一个约120°的碰撞板。在碰撞板的左右两侧各装有一个碰撞传感器,考虑到要求的可靠性高,所以采用机械式的碰撞传感器,就是一个行程开关,外形和引脚如图11-47所示,1脚为常闭触头,2脚为常开触头,3脚为公共端。
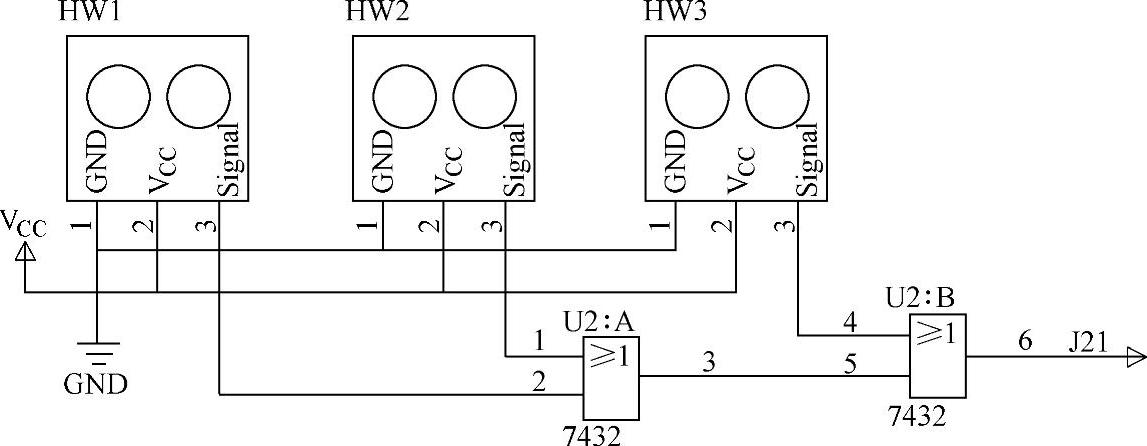
图11-46 台阶检测电路
应用时3脚公共端接一个10kΩ的上拉电阻,常闭触头接地,电路如图11-48所示。当没有发生碰撞时,输出为低电平;发生碰撞时,常闭触点断开,输出信号为高电平。这样就达到了对碰撞的检测。
(5)霍尔转速传感器 常用的电压型霍尔传感器有开关式和脉冲式两种。开关式在有磁性物体一极接近时输出高电平并保持,直到有磁性物体的另一极接近时才改变输出。脉冲式则只在有磁性物体接近时才输出一个高电平,离开后又恢复低电平。
这里用的就是脉冲式霍尔传感器,型号为633,其1脚为电源正,2脚为电源地,3脚为信号输出端。将它安装在电动机减速箱的一个齿轮轴上,在齿轮轴的偏心位置安装一粒小磁钢片,当电动机带动齿轮转动时,通过霍尔传感器输出一个与其转速成比例的脉冲信号,通过计算单位时间的脉冲数就可以知道电动机的当前转速,具体电路如图11-49所示。
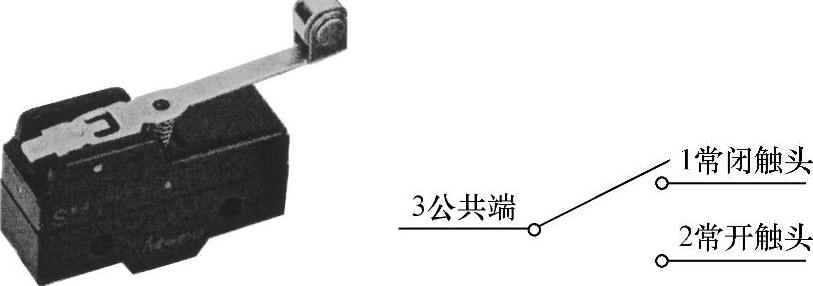
图11-47 碰撞传感器外形和引脚
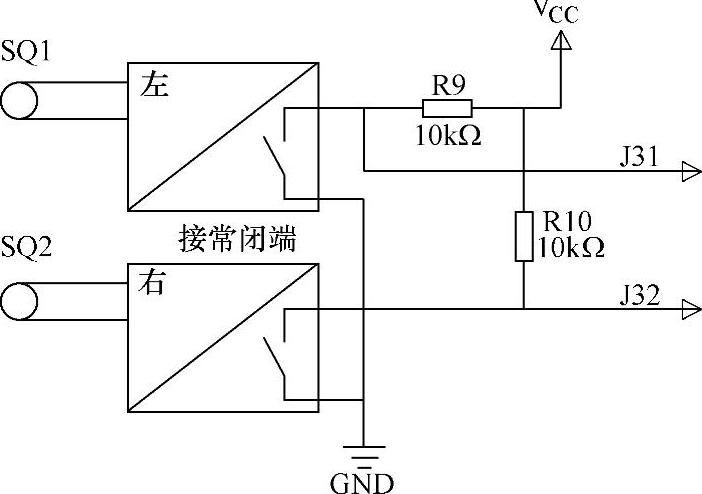
图11-48 碰撞传感器电路
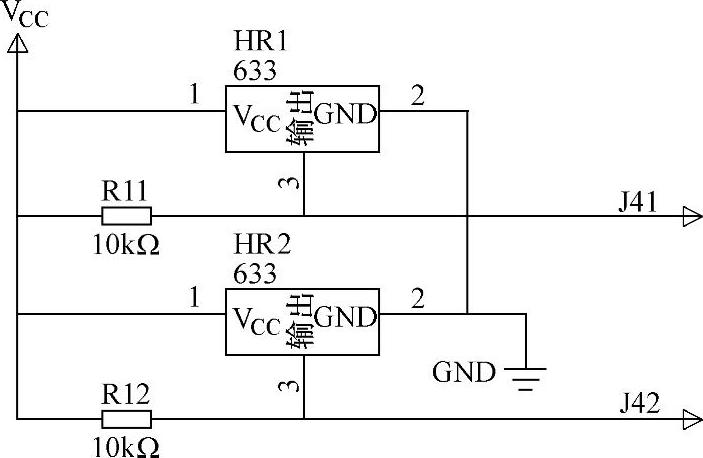
图11-49 霍尔传感器电路
把分布在不同位置,处于不同状态的各个同类或不同类传感器所提供的局部不完整量加以综合,消除传感器信息之间可能存在的冗余和矛盾,利用信息互补,降低不确定性,以形成对系统环境完整一致的感知描述,从而提高智能系统决策、规划的科学性,反应的快速性、正确性,降低决策风险。
综合上述几部分传感器电路,将它们组合在一起,得到一个完整的传感器信号采集电路如图11-50所示。
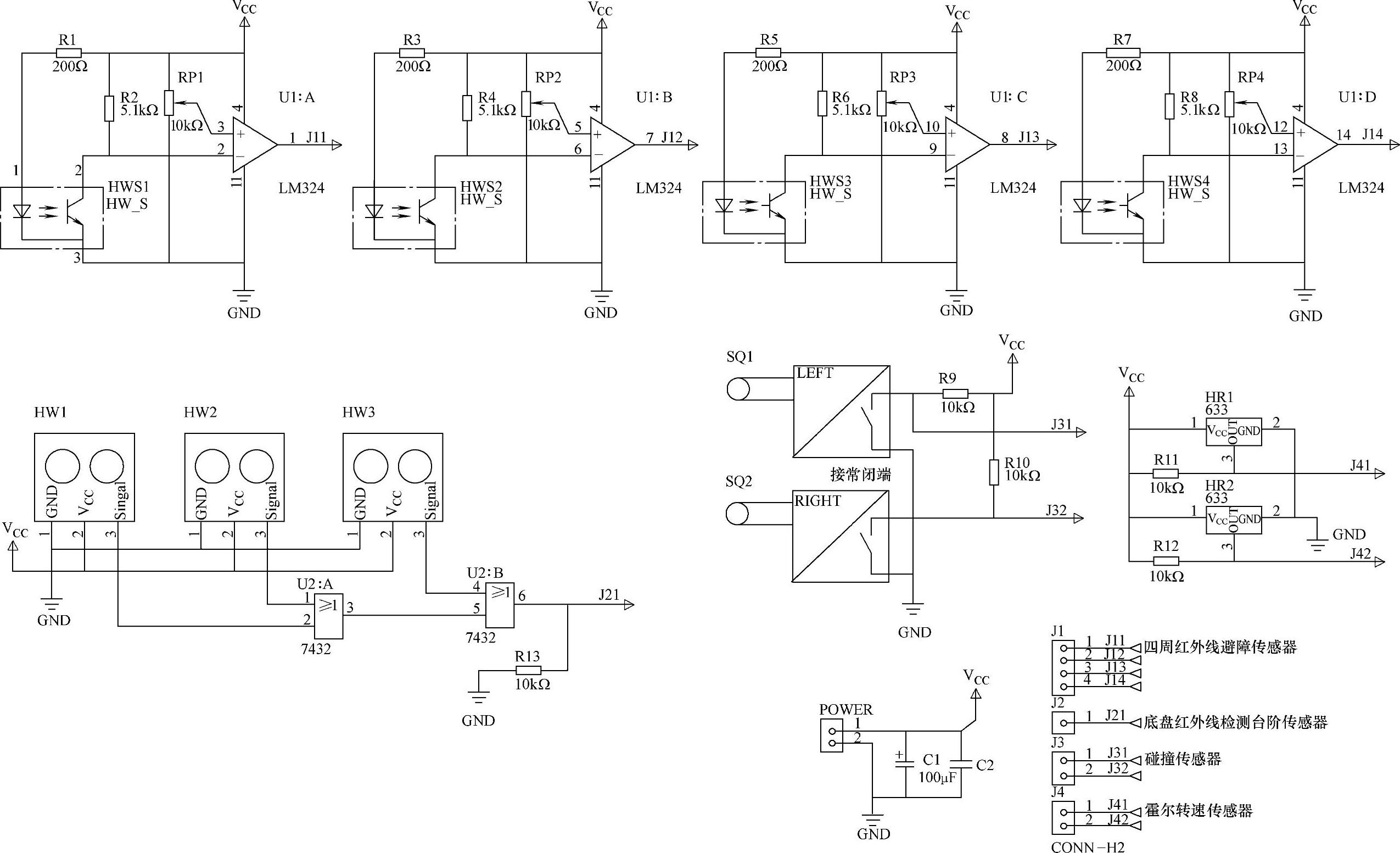
图11-5O 传感器信号采集电路总图
5.电池电压检测模块
清洁机器人使用12节1.2 V 2400mA的镍氢可充电电池供电,随着机器人清扫工作的进行,电池电量逐渐降低,当电量低于一定值时就需要对电池进行充电。电池的电压与电量间存在一定的线性关系,所以只要检测电池的电压,使其在低于一定值时进行充电既可。
电池电压经过比较器后,将范围缩小为0~5V,然后使用AD采集,单片机就可以掌握电池电压。
(1)电压信号转换电路 清洁机器人所使用的电池组标定电压为14.4V,经实验发现充满电后期实际输出电压约为17V,当降低到12.5V以下时,电量所剩无几。所以限定电池的电压范围为12.5~17.5V。将实际电池电压减去12.5V就得到了一个0~5V的AD可采集的电压范围。
1)基准电压源电路。基准电压源电路使用TL431芯片来实现,TL431是美国德州仪器公司开发的一种三端可调式精密基准稳压器,三个引脚分别是阴极(CATHODE)、阳极(ANODE)和参考端(REF)。它的输出电压用两个电阻就可以任意地设置从VREF(2.5V)到36V的任何值。
由于TL431正常工作稳压需要一定的压差,所以不能提供12.5V的基准电压。将12.5V的基准电压拆分成两个基准电压10V和2.5V,如图11-51所示。TL431内部有一个2.5V的基准源,从参考端(1引脚)引出即得到一个2.5V的基准电压。10V的基准电压由改变电阻R1和R2的值决定,其计算公式为
Vo=VREF(1+R1/R2) (VREF=2.5V)
实际电路应用中接入RP1进行调节,R1取22kΩ,R2取0,RP1取10kΩ,调节RP1至8kΩ,代入上式得:Vo=2.5V×[1+(22kΩ+2kΩ/8kΩ)]=10V。
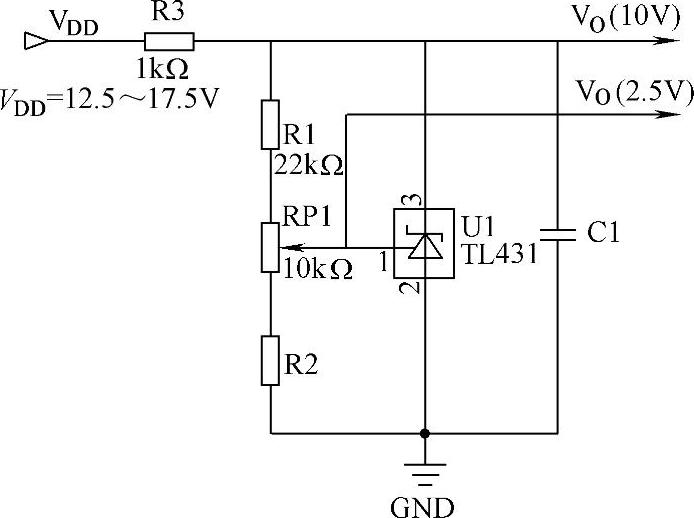
图11-51 TL431基准电压电路
需要注意的是,使用时需要TL431正常工作的条件,即工作电流必须大于1mA。则R3的取值需满足:R3≤(12.5V-10V)/1mA=2.5kΩ,这里取1kΩ。当压差很大时,R3的功耗随之增加,使用时注意。
2)比较器电路。将uA741运算放大器连接成比较器,如图11-52所示,输出电压为正输入端电压与负输入端电压之差。通过第一个比较器后电压为Vo1=VDD-10V(VDD为电池电压),通过第二个运算放大器后输出电压为Vo2=Vo1-2.5V,即Vo2=VDD-12.5V,保证了输出电压为0~5V,可以为AD采样用。
(2)A/D采样电路AD转换器采用TLC549,TLC549是美国德州仪器公司生产的8位串行A/D转换器芯片,可与通用微处理器、控制器通过I/O CLOCK、CS、DATA OUT三条接口线进行串行接口。具有4MHz片内系统时钟和软、硬件控制电路,转换时间最长17μs,TLC548允许的最高转换速率为45500次/s,TLC549为40000次/s。总失调误差最大为±0.5LSB,典型功耗值为6mW。采用差分参考电压高阻输入,抗干扰,可按比例量程校准转换范围,VREF-接地,(VREF+)-(VREF-)≥1V,可用于较小信号的采样。
TLC549电路如图11-53所示,AIN为采样电压输入,连接电池电压,并连接一个5.1V的稳压二极管1N4733,用于输入电压高于5V时保护TLC549。REF+接VCC并用一个小瓷片电容提高电压稳定性,REF-接地。5、6、7引脚作为串行外围接口线(SPI)与单片机连接。
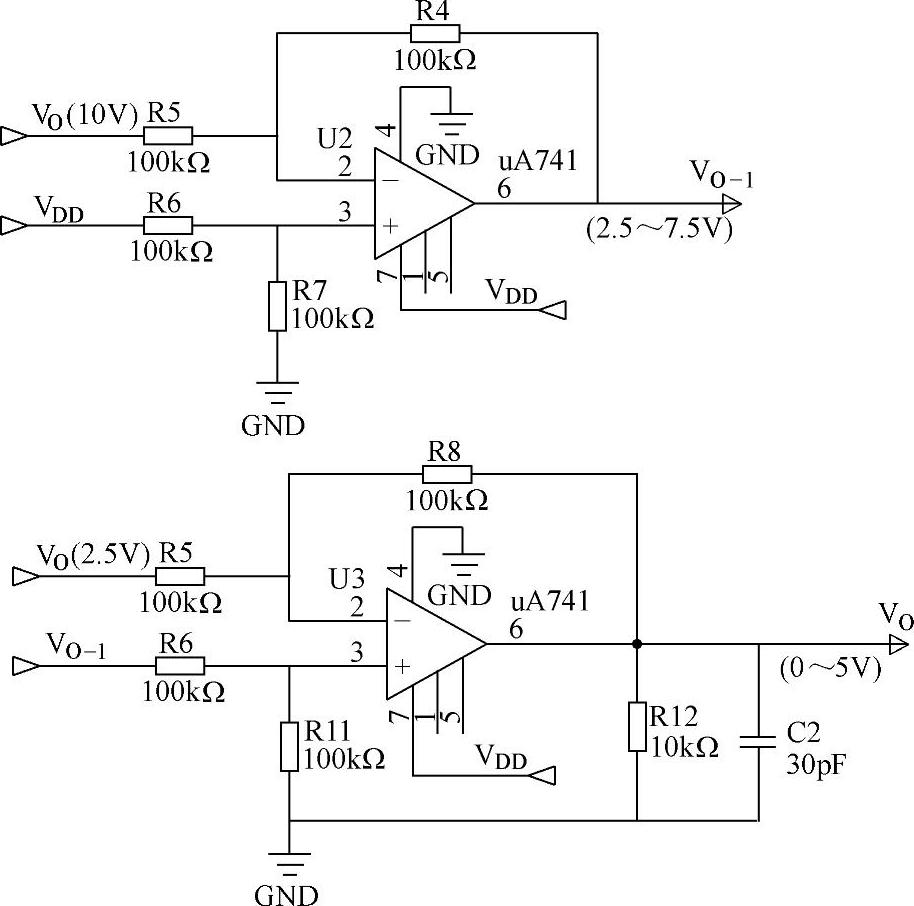
图11-52 电压比较器电路
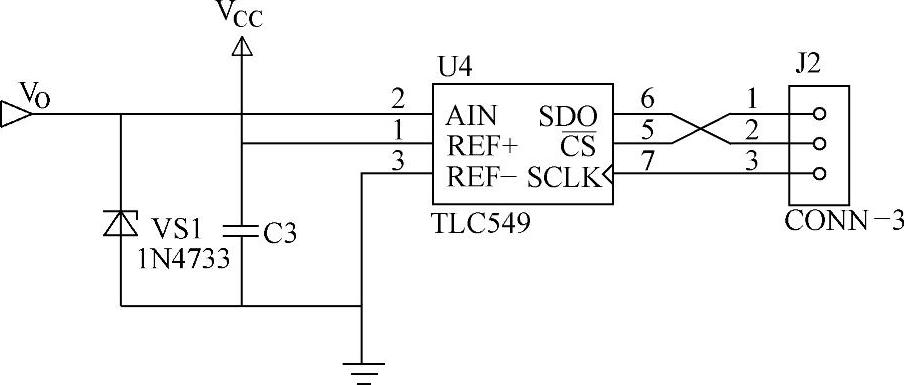
图11-53 TLC549电路