2.1.1 刀具-主轴子系统动力学模型
2026年01月15日
2.1.1 刀具-主轴子系统动力学模型

工艺系统的组成部分中,刀具-主轴的组成部分相对独立与固定。当不考虑沿刀具轴向的振动且忽略机床本体的其他影响时,刀具-主轴形成的子系统可以简化为多自由度(DOF)的质量-弹簧-阻尼系统,对应的动力学方程为
式中:MT、CT和KT分别为刀具-主轴子系统的质量矩阵、阻尼矩阵和刚度矩阵。加工过程中不考虑刀具磨损以及机床运动时,其状态不发生变化,刀具-主轴子系统可以看作线性定常系统。(https://www.daowen.com)
如图2.3所示,对于多轴数控机床,当刀具姿态及位置发生变化时,机床系统的模态参数也会随之发生变化。此时,可建立机床系统中刀尖对应的全模态场以描述机床不同姿态时的刀尖模态:
式中:x,y,z为机床平动坐标;α,β对应机床的两个转动坐标。当加工轨迹确定后,根据机床的全模态场,机床的运动坐标可以表示为刀轨弧长参数s的函数,如x=x(s)。需要注意的是,在实际加工中,转动轴角度方位的变化并非一定会对机床动力学特性产生显著影响,通常只需要记录影响最为显著的运动坐标即可。多轴机床的动态特性数据可以存储在C空间[3,4]中。
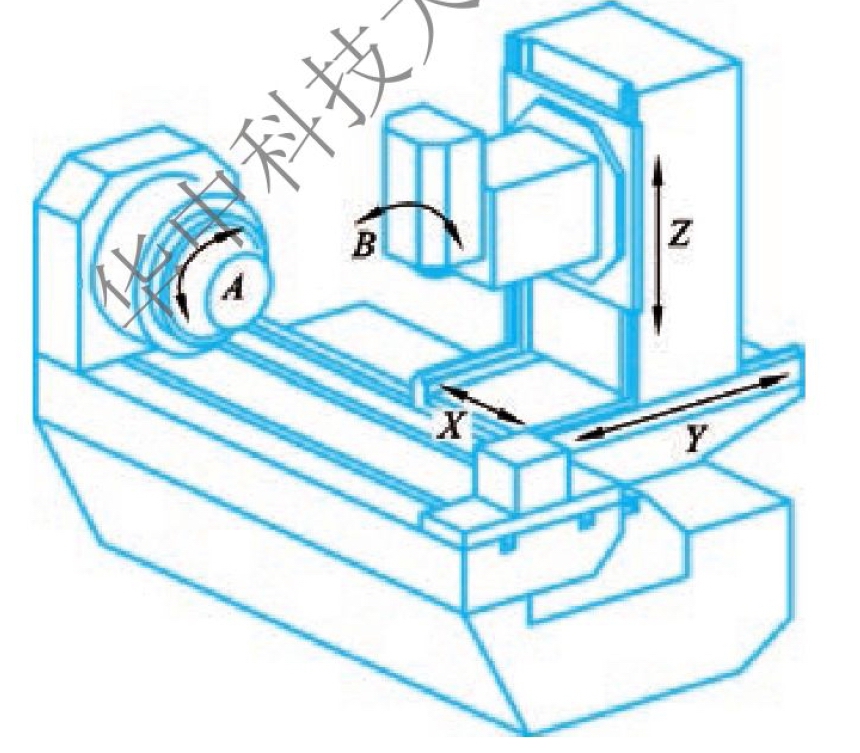
图2.3 五轴数控机床