6.5.1 多余约束中存在面约束
2026年01月15日
6.5.1 多余约束中存在面约束

如图6.6所示,实际应用中,常用的多余约束中存在面约束的装夹形式有三种,分别为面支撑装夹、点对面装夹和面对面装夹。根据式(6.9),残余应力变形感知模型的求解需要感知获得特定位置的装夹力变化。对于多余约束中存在面约束的装夹方式,残余应力变形势能引入所导致的等效力矩被多余约束对工件的装夹力变化值产生的力矩抵消。其数学表达式为

式中:M为残余应力等效力矩;m为面约束数量;Ai为面约束装夹接触面积;n为点约束数量;Δp为面约束接触面上的接触应力增量;ΔF为点约束上的接触力增量;l为装夹力力臂。(https://www.daowen.com)
面约束接触合力数值可以通过在夹具上安装压力传感器感知得到。但是,当加工完成,工件引入残余应力变形势能之后,工件一端引入了等效力矩。由于面约束装夹接触是一个面,此时夹具对工件的装夹力并不是正对施加的,现有的技术很难直接通过传感的方法获得准确的合力位置。面接触装夹力作用位置的不确定使得感知模型无法准确求解。但在实际应用中,当夹具装夹面相对于整个工件尺寸而言足够小时,可近似认为装夹力施加位置在装夹面的正中。
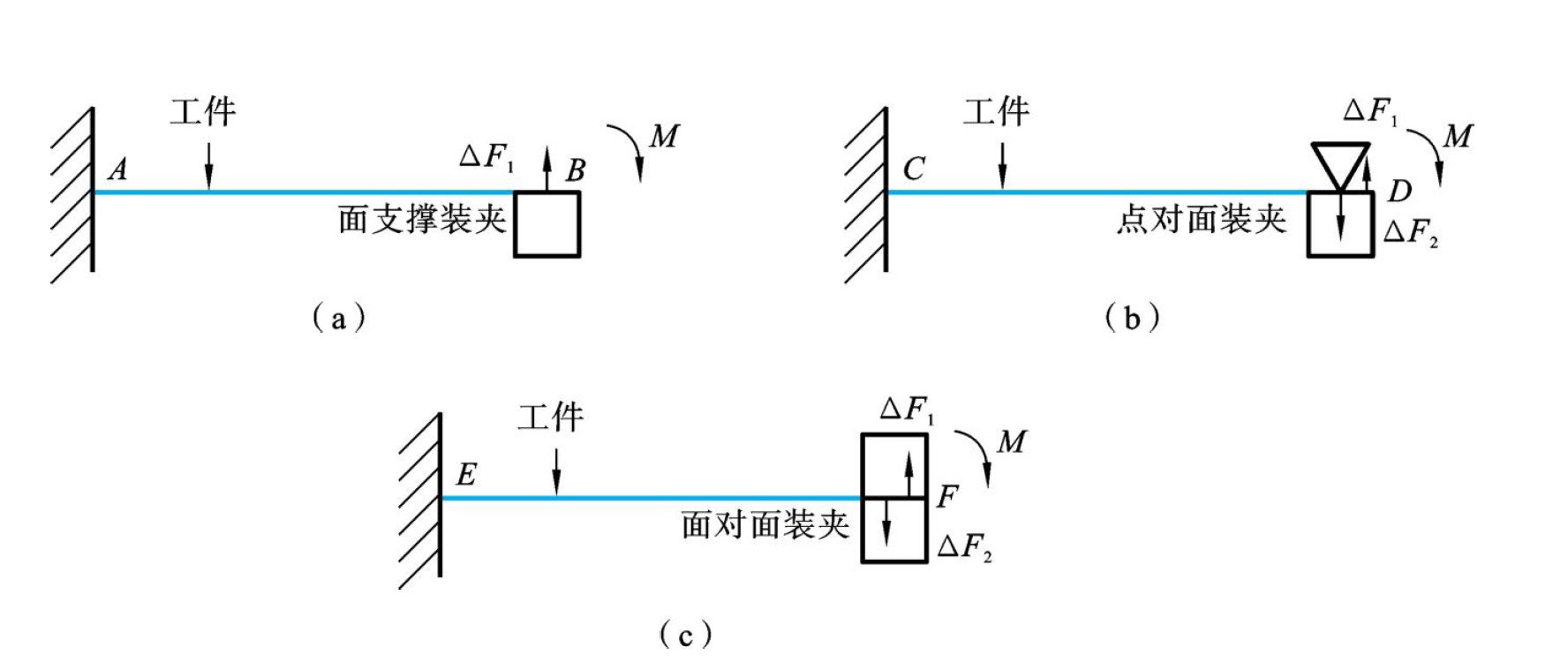
图6.6 典型面约束装夹系统
(a)面支撑装夹形式(b)点对面装夹形式(c)面对面装夹形式(https://www.daowen.com)