6.5.2 多余约束为点约束
2026年01月15日
6.5.2 多余约束为点约束

如图6.7所示,实际应用中多余约束为点约束存在两种装夹形式,一种是点支撑形式,另外一种为点对点装夹形式。
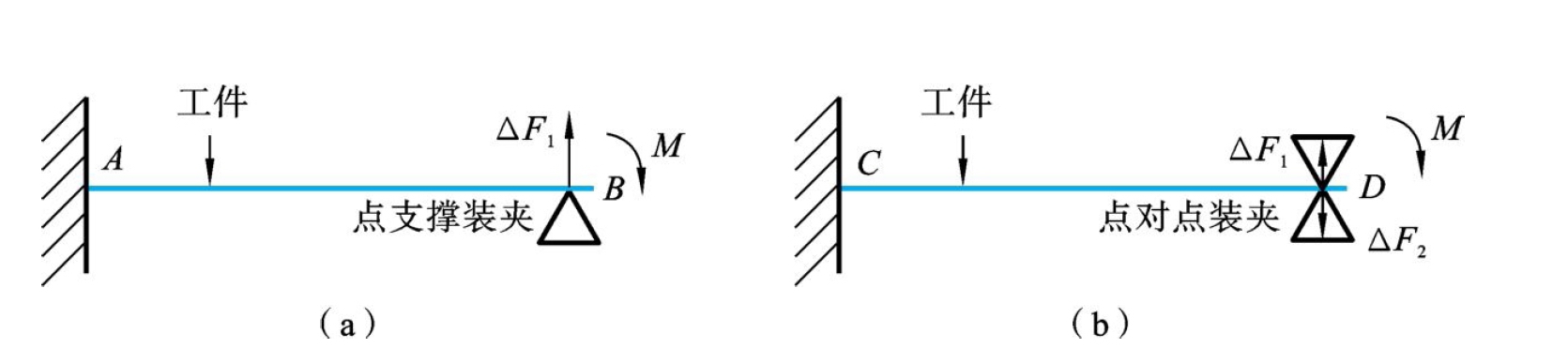
图6.7 典型点约束装夹系统
(a)点支撑装夹形式(b)点对点装夹形式
对于点约束装夹形式,其残余应力等效力矩平衡关系为

通过在点约束上安装压力传感器就可以准确感知获得特定约束位置的装夹力,即式(6.11)右侧元素均可准确感知获得。在此种装夹形式下可准确求解残余应力变形感知预测模型。但是应用支撑进行变形感知时,需要预估变形方向,使得支撑位置上工件变形压迫支撑。(https://www.daowen.com)
如图6.8所示,在实际感知过程中,由于装夹形式的限制,以及零件结构形式和表面形状的复杂性,在装夹过程中往往难以保证传感器感知方向完全与该装夹点处的工件表面法向保持一致。此时,感知到的装夹力为实际接触力向感知杆轴向的分解数值,可通过感知力反求接触力数值用于残余应力变形感知预测模型的求解,求解公式如下:

式中:F为感知位置装夹力变化值;Fs为传感器感知到的压力变化值;α和β分别为曲面的法向量和传感器的轴向量。
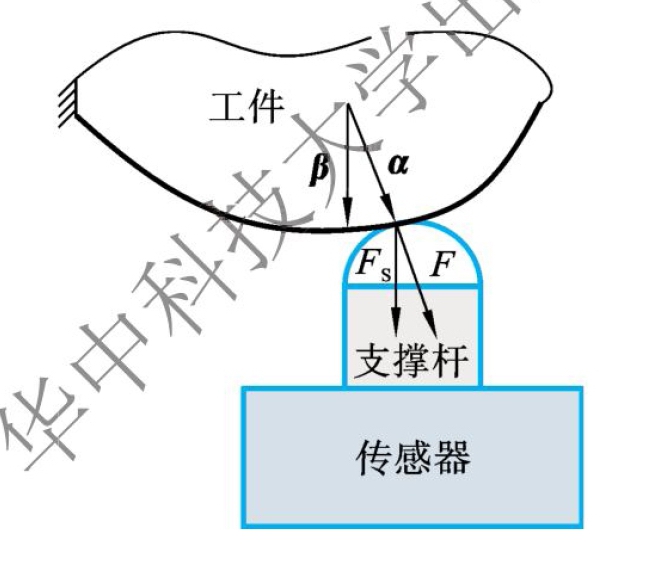
图6.8 曲面点约束示意图