5.3.1 送料机的交流电动机正反转控制
1.控制要求
某送料机的控制由一台电动机驱动,如图5-39所示,其往复运动采用电动机正转和反转来完成。正转完成送料,反转完成取料,由操作台控制。
电动机在正转运行时,按反转起动按钮,电动机不能反转,只有按停止按钮后,再按反转按钮,电动机才能反转运行。同理,在电动机反转运行时,也不能直接进入正转运行。
图5-39 送料机外观
2.硬件设计
本案例采用S7-300 PLC进行控制,它的输入和输出资源分配如表5-2所示。
表5-2 送料机的PLC控制

根据送料机的实际要求,本方案采用S7-300进行控制,CPU选型为CPU 313C-2DP,它集成了DI16/DO16,如图5-40所示,具体电气接线如图5-41所示。
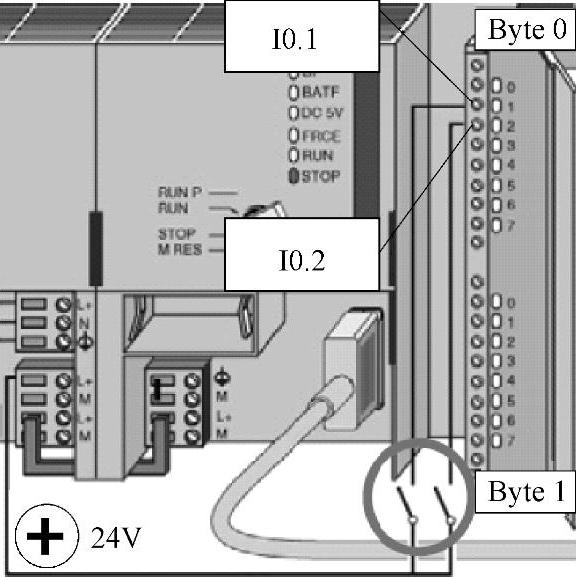
图5-40 集成DI16/DO16
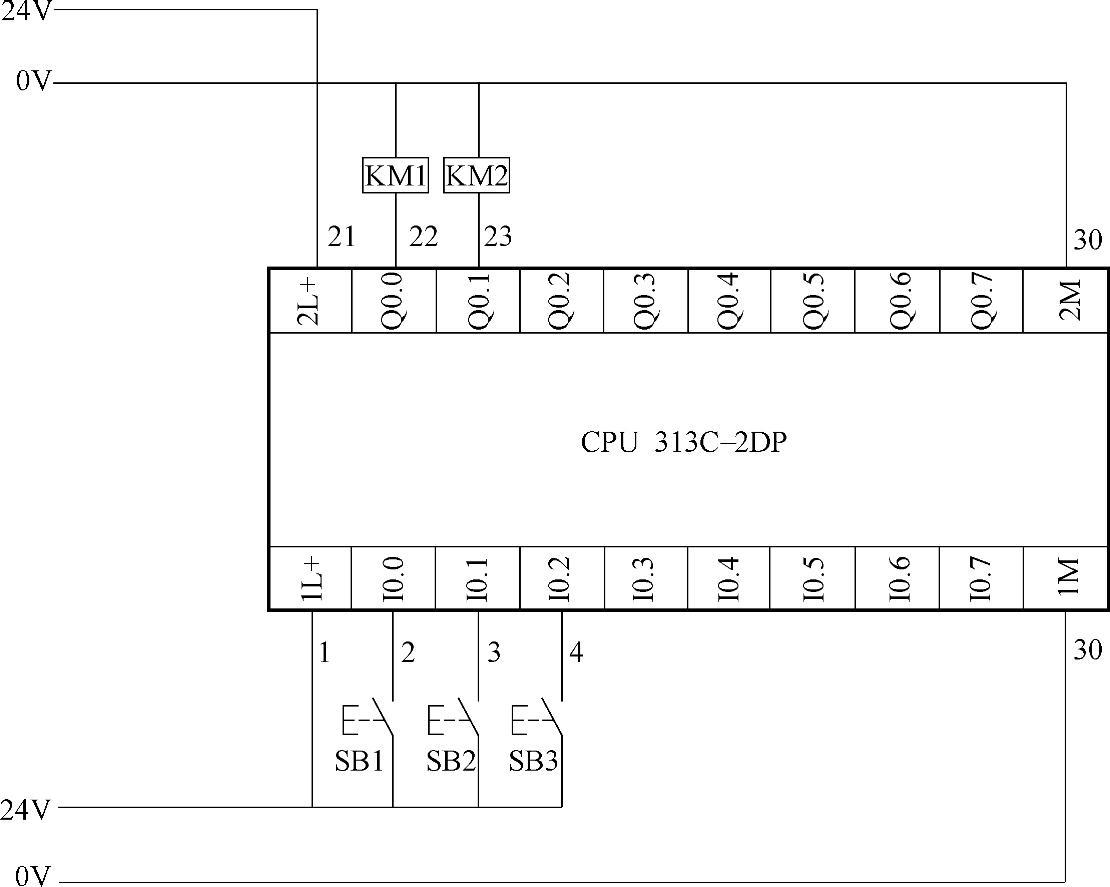
图5-41 送料机PLC控制原理图
3.硬件配置
1)图5-42所示为硬件配置,从“配置文件”中找到送料机PLC所需要的RACK-300(机架)、PS-300(电源)和CPU-300(CPU),依次进行添加。
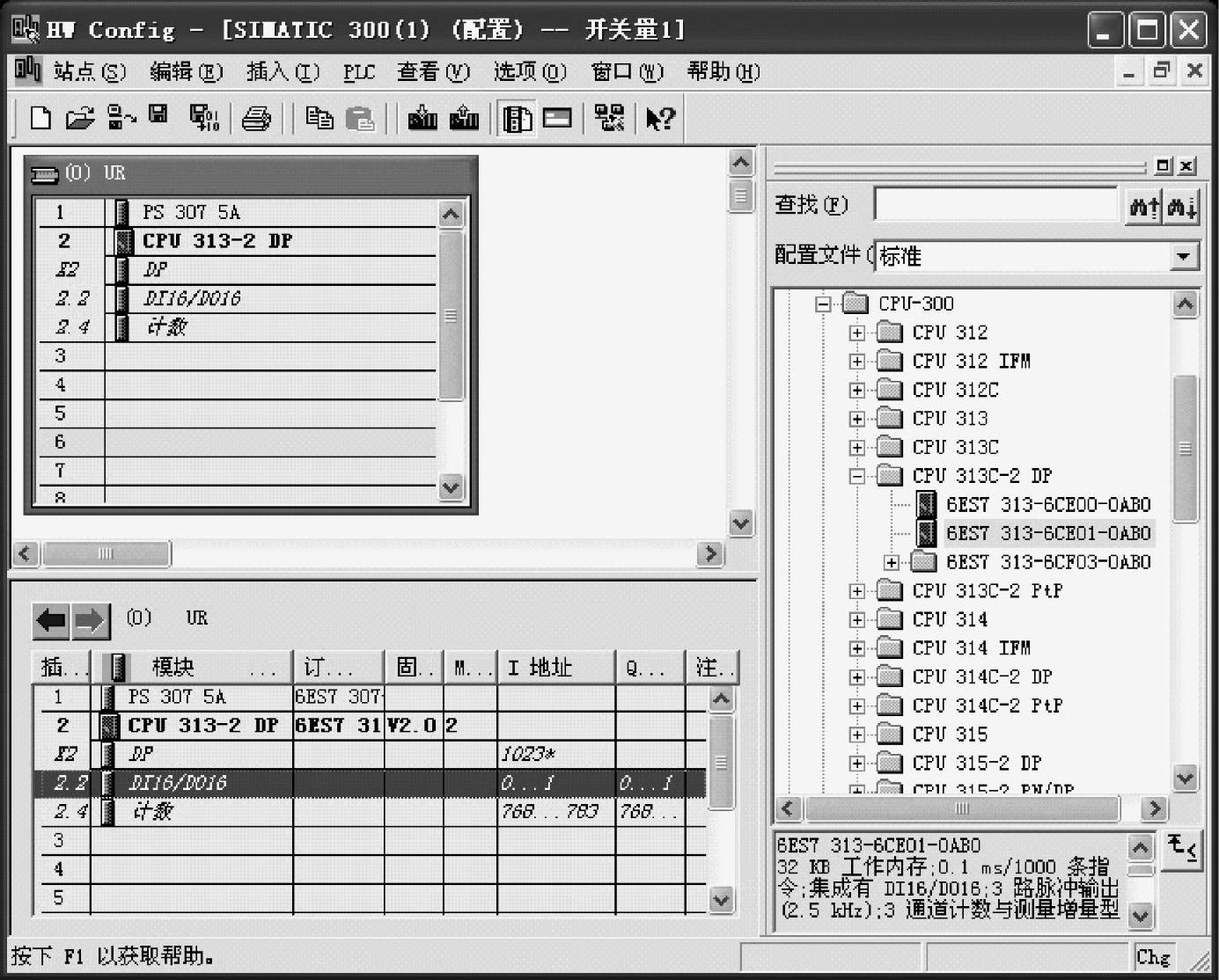
图5-42 送料机硬件配置
2)单击CPU 313-2 DP,设置必要的参数,如MPI接口地址等,如图5-43所示。
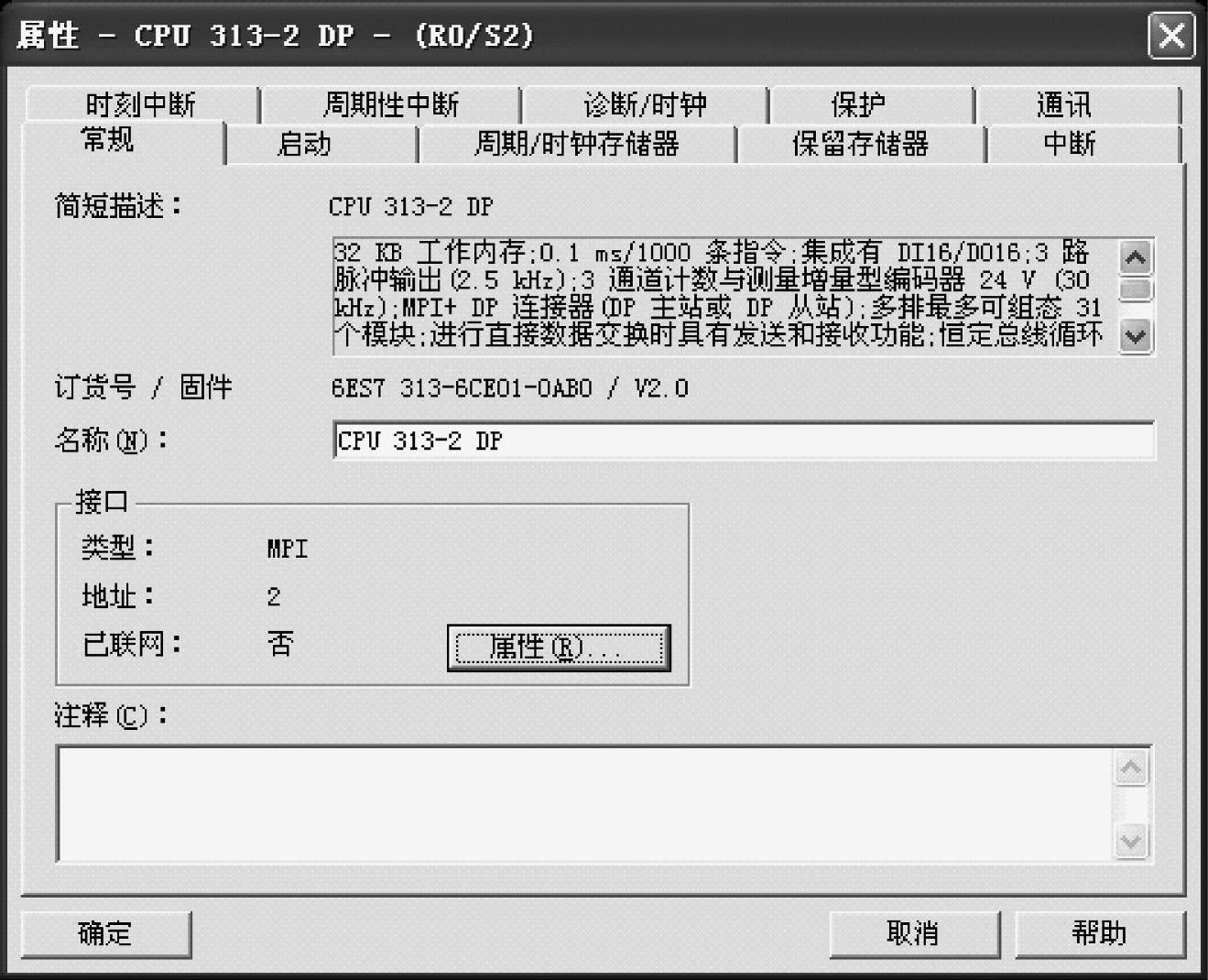
图5-43 CPU属性
3)单击CPU 313-2 DP的DI16/DO16,如图5-44所示设置输入开始地址和输出开始地址(可以随意设置)。如果选择系统默认,则为124开始的地址,如图5-45所示。
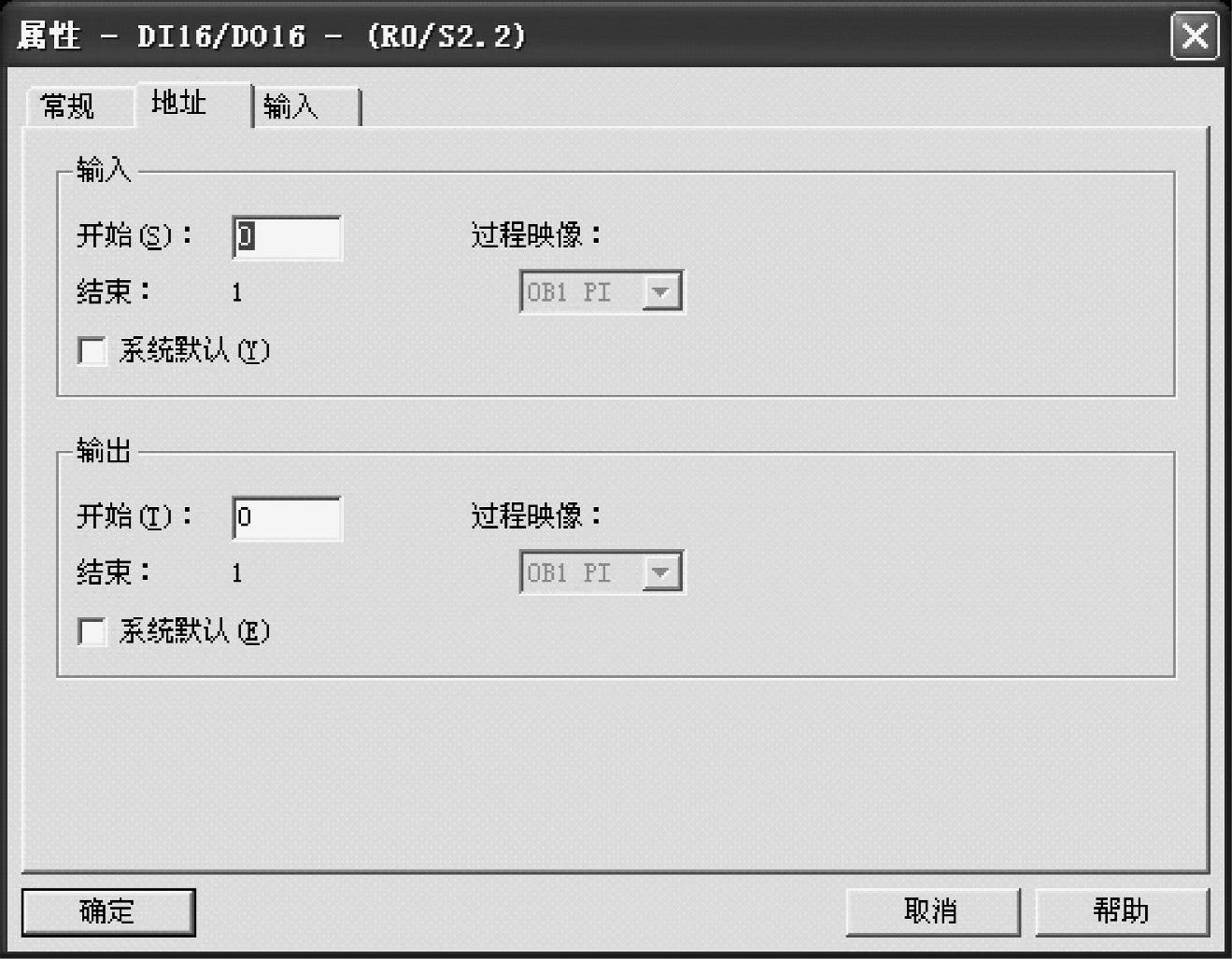
图5-44 DI16/DO16的属性设置
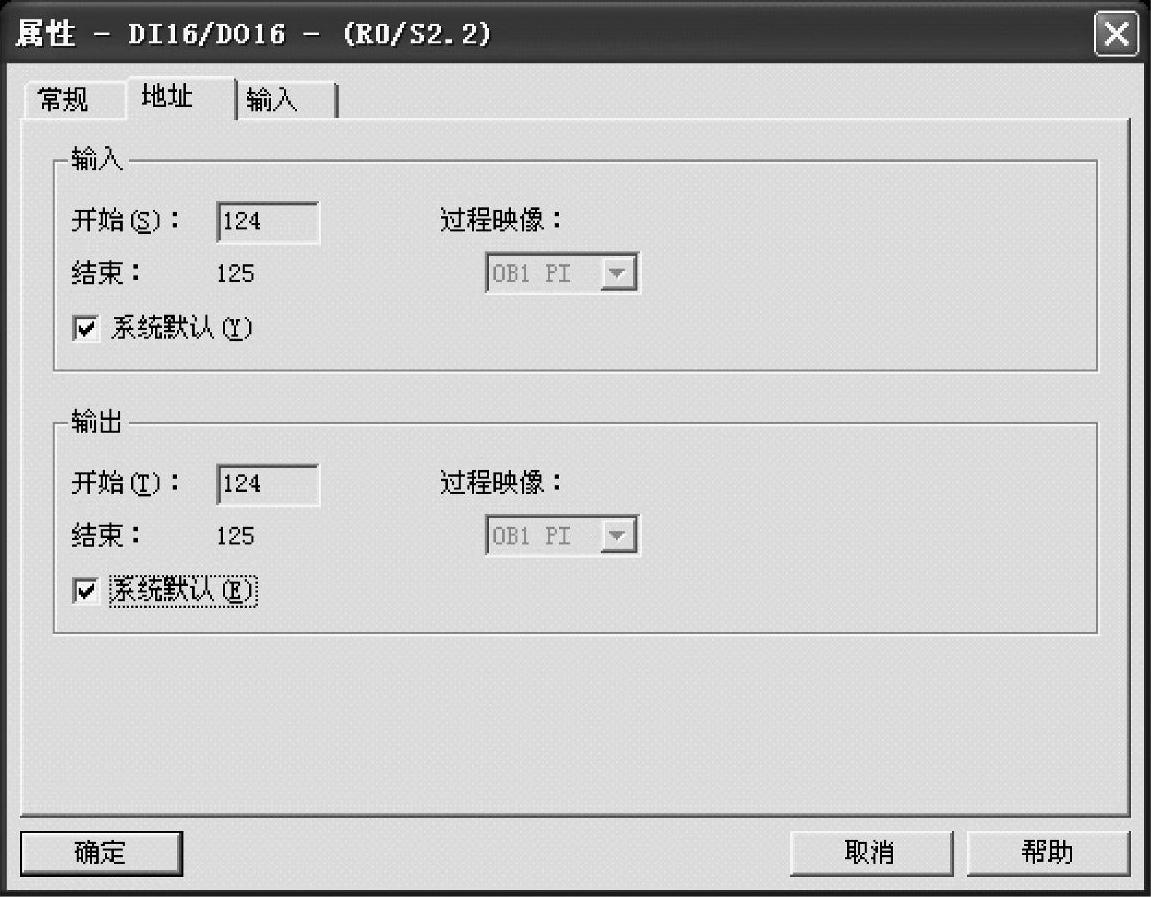
图5-45 DI16/DO16的默认地址设置
如有必要,还可以设置DI16/DO16的输入中断条件,如图5-46所示。
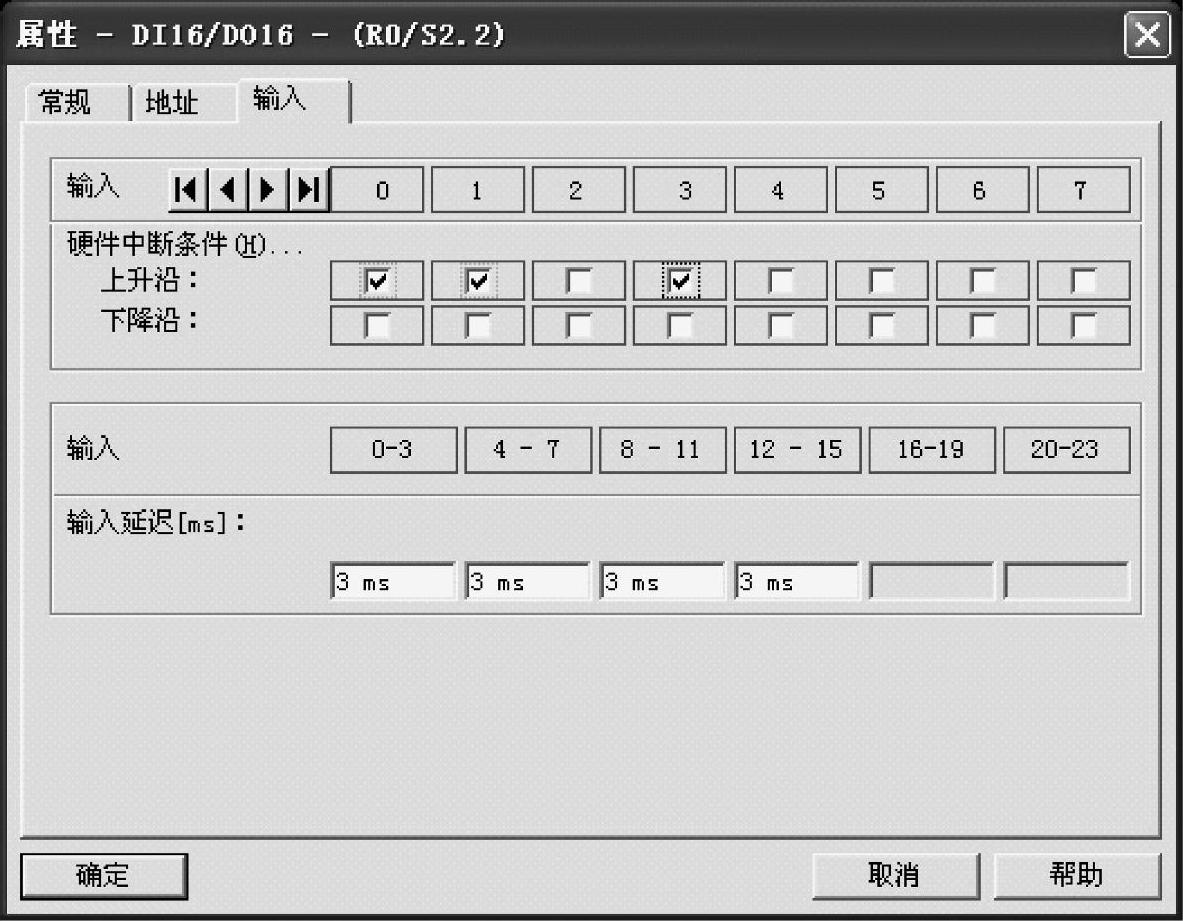
图5-46 DI16/DO16的输入中断条件
4)点击图符“ ”对该硬件进行保存和编译。(https://www.daowen.com)
”对该硬件进行保存和编译。(https://www.daowen.com)
5)点击图符“ ”对该硬件配置进行下载。
”对该硬件配置进行下载。
① 选择目标模块,如本案例中的CPU313-2 DP,如图5-47所示。
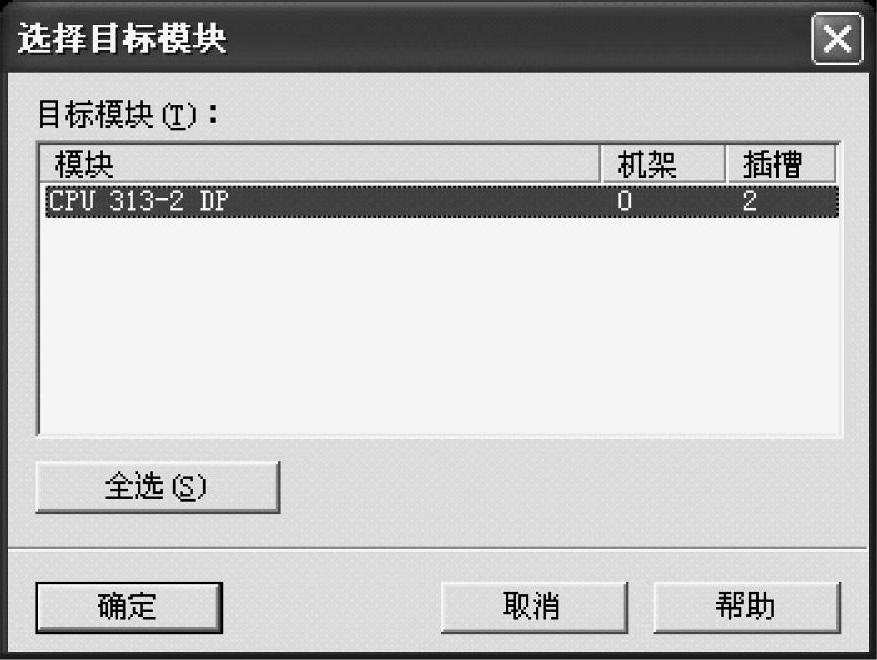
图5-47 选择目标模块
② 选择节点地址,即编程设备(如PC)将通过哪个站点地址连接到模块CPU313-2 DP中,本案例选择MPI地址=2的站点进行连接,如图5-48所示。
③ 点击“确定”按钮后,会进行如图5-49所示的下载,在下载过程中,将把所配置的模块一一下载进去。
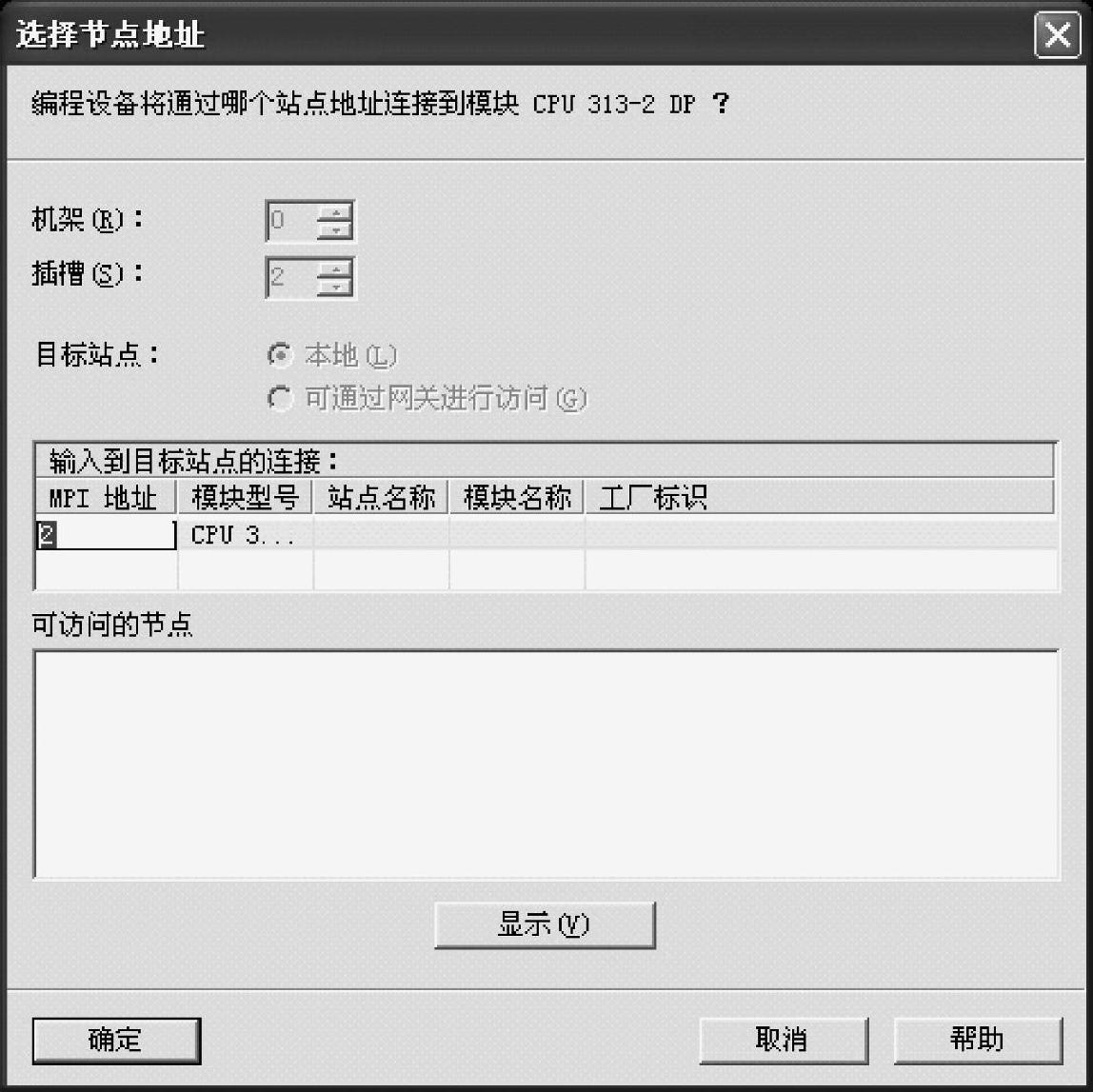
图5-48 选择节点地址
④ 在下载过程中,如果PLC处于RUN状态,则会跳出如图5-50所示的“停止目标模块”的提示。
图5-49 下载
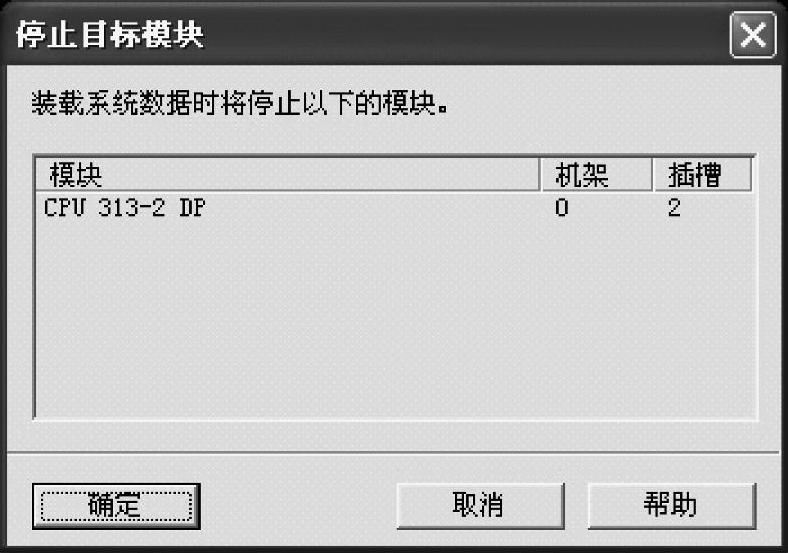
图5-50 下载提示“停止目标模块”
⑤ 在下载完毕后,将提醒用户是否现在就处于完全重启,一般选择“是”即可确保配置文件完全进入PLC硬件,如图5-51所示。
4.软件编程
1)打开“程序元素”窗口中的“位逻辑”指令树,如图5-52所示。
2)在硬件配置结束后,即可点击OB1块进行编程。完整的送料机电动机正反转控制程序如图5-53所示。
图5-51 下载提示“完全重启”
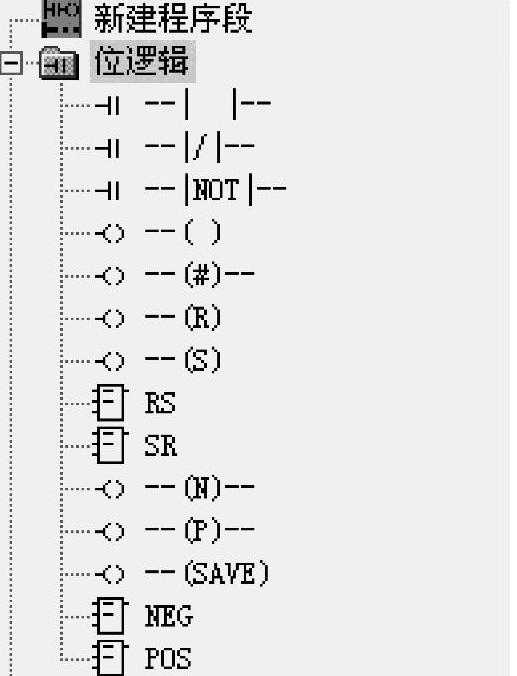
图5-52 位逻辑指令树
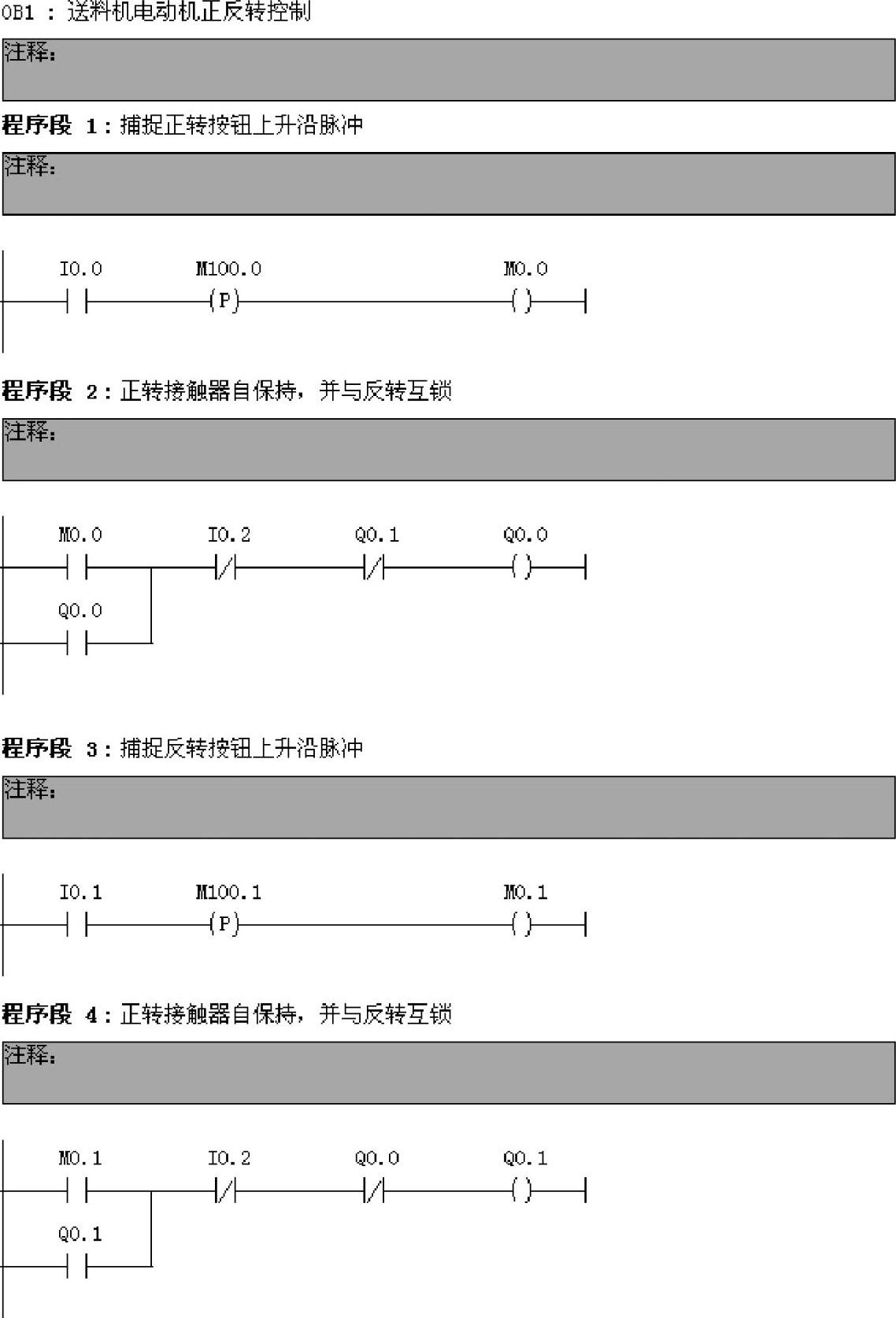
图5-53 送料机控制程序
3)保存OB1并下载,如图5-54所示。
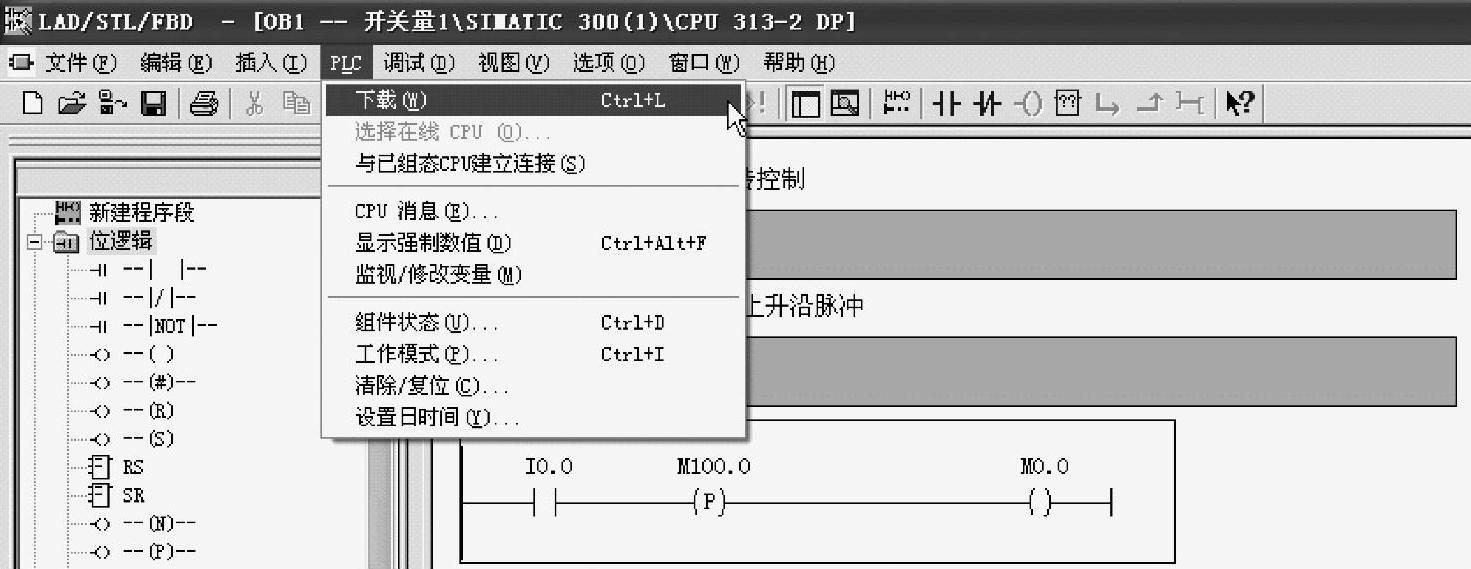
图5-54 进行PLC下载
4)点击图标“ ”使得PC与已组态CPU建立连接。
”使得PC与已组态CPU建立连接。
5)点击图标“ ”进行监控,如图5-55所示,从中可以看到窗口上部的文件名变成了“ONLINE”(在线);窗口下部的RUN为绿色变化条;梯形图逻辑出现实线ON和虚线OFF。由此可以进行程序调试和故障排除。
”进行监控,如图5-55所示,从中可以看到窗口上部的文件名变成了“ONLINE”(在线);窗口下部的RUN为绿色变化条;梯形图逻辑出现实线ON和虚线OFF。由此可以进行程序调试和故障排除。
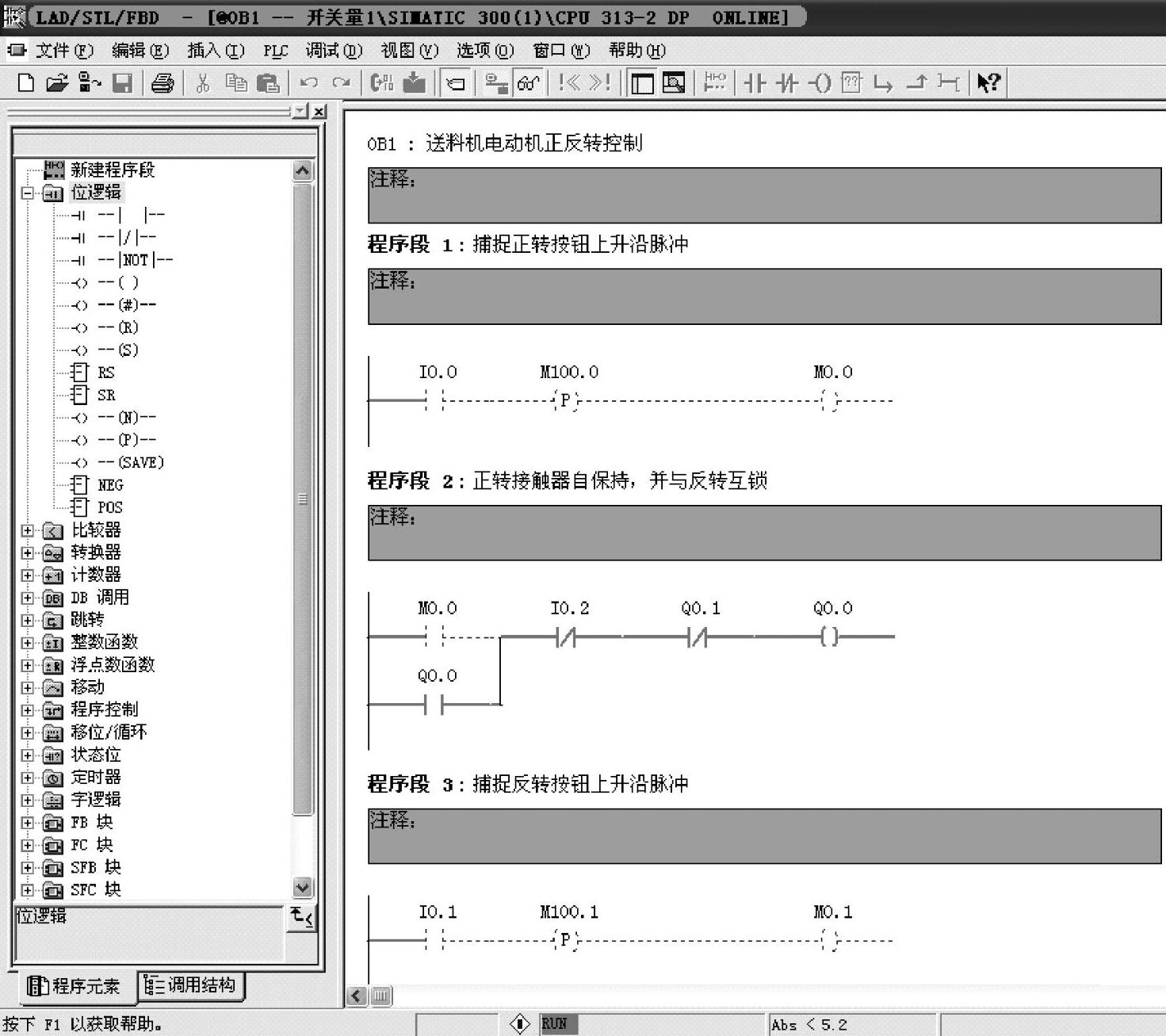
图5-55 在线监控