5.3.3 液体自动混合的控制
1.控制要求
图5-61所示为两种液体的混合装置结构图。SL1、SL2和SL3为液面传感器,液面淹没时触点接通,两种液体(液体A和液体B)的流入和混合液体流出分别由电磁阀YV1、YV2、YV3控制,M为搅拌电动机,控制要求如下:
1)初始状态。当装置投入运行时,液体A、B阀门关闭,混合液体阀门打开20s,将容器内液体放空后关闭。
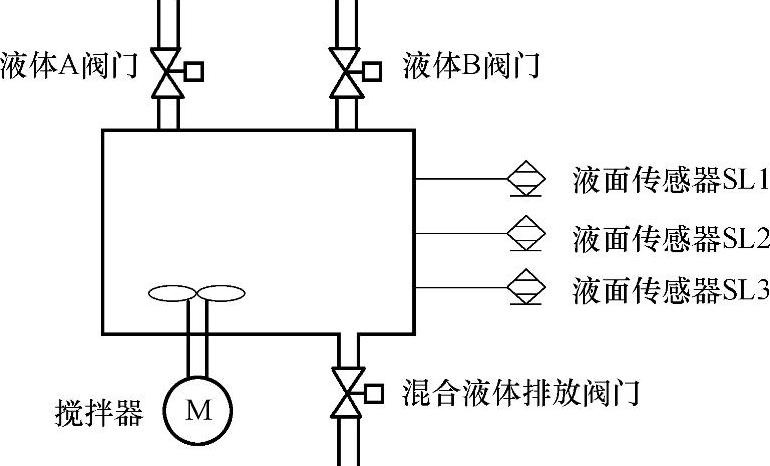
图5-61 液体混合装置
2)起动操作。按下起动按钮SB1,装置就开始按下列给定的规定动作工作。液体A阀门打开,液体A流入容器。当液面到达SL2时,SL2触点接通,关闭液体A阀门,同时打开B阀门。当液面到达SL1时,SL1触点接通,关闭液体B阀门,此时搅拌电动机工作,1min后停止,混合液体阀门打开,开始放出混合液体。当液面下降到SL3时,SL3触点由接通变为断开,再经过20S后,容器放空,关闭混合液体阀门,开始下一周期操作。
3)停止操作。按下停止按钮SB2后,在当前的混合操作处理完毕后,才停止操作,即停在初始状态上。
2.硬件设计
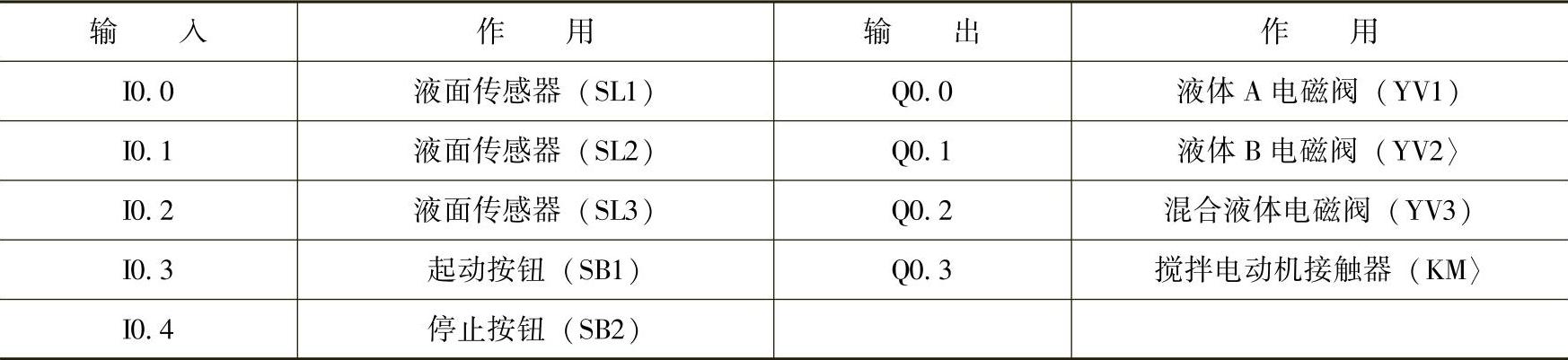
本系统采用S7-300 PLC进行控制,输入和输出资源分配如表5-4所示。
表5-4 液体自动混合装置的PLC控制
接线原理图如图5-62所示。
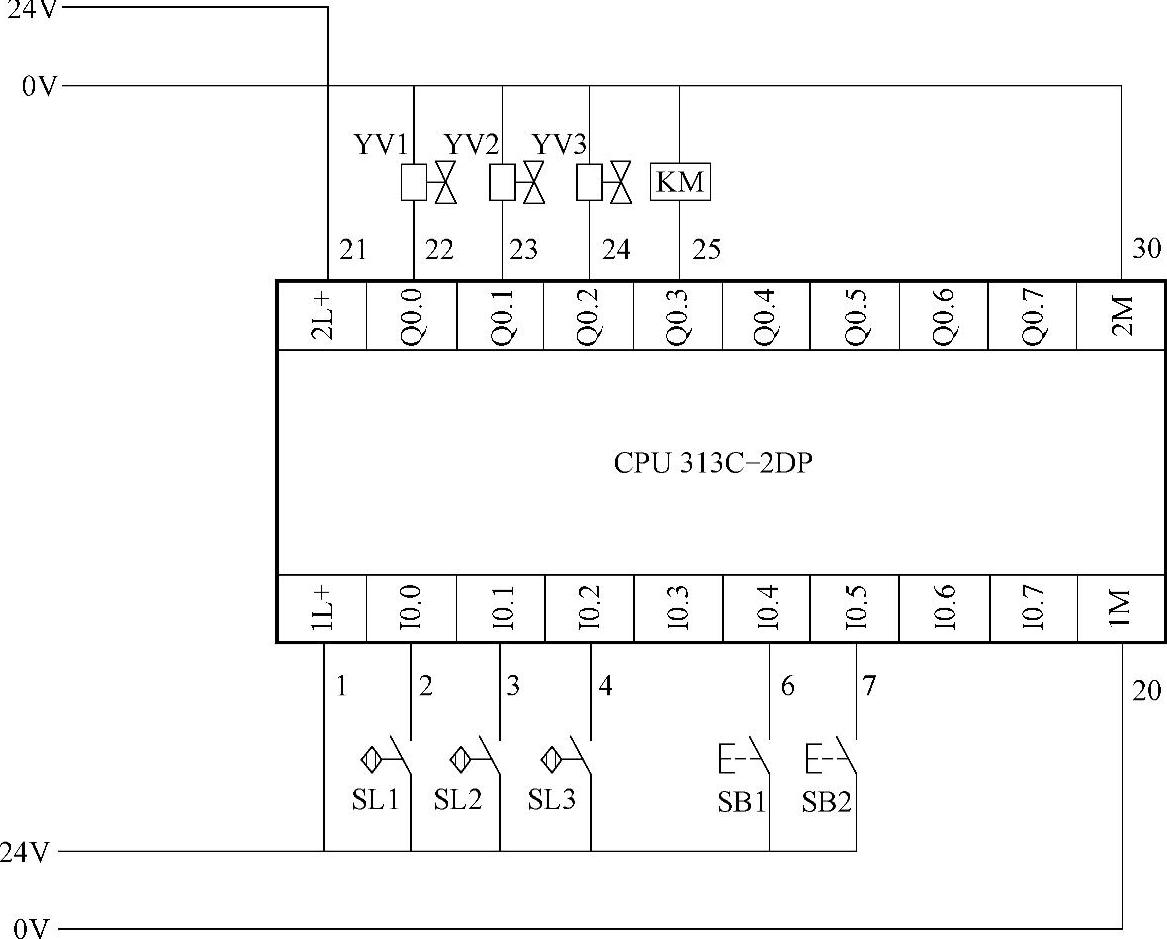
图5-62 液体混合控制电气接线
3.硬件配置(同5.3.1节送料机控制)(https://www.daowen.com)
4.软件编程
(1)软件编程思路
液体自动混合从控制要求上可以看出,这是顺序控制。主要考虑停止操作,即按下停止按钮SB2后,在当前的混合操作处理完毕后,才停止操作,即停在初始状态上。就是说按下停止按钮不能立即停止,若立即停止在工艺上是不允许的,会出现事故。因此停止按钮的作用就是停止循环。
图5-63所示是本项目的顺序控制思路。
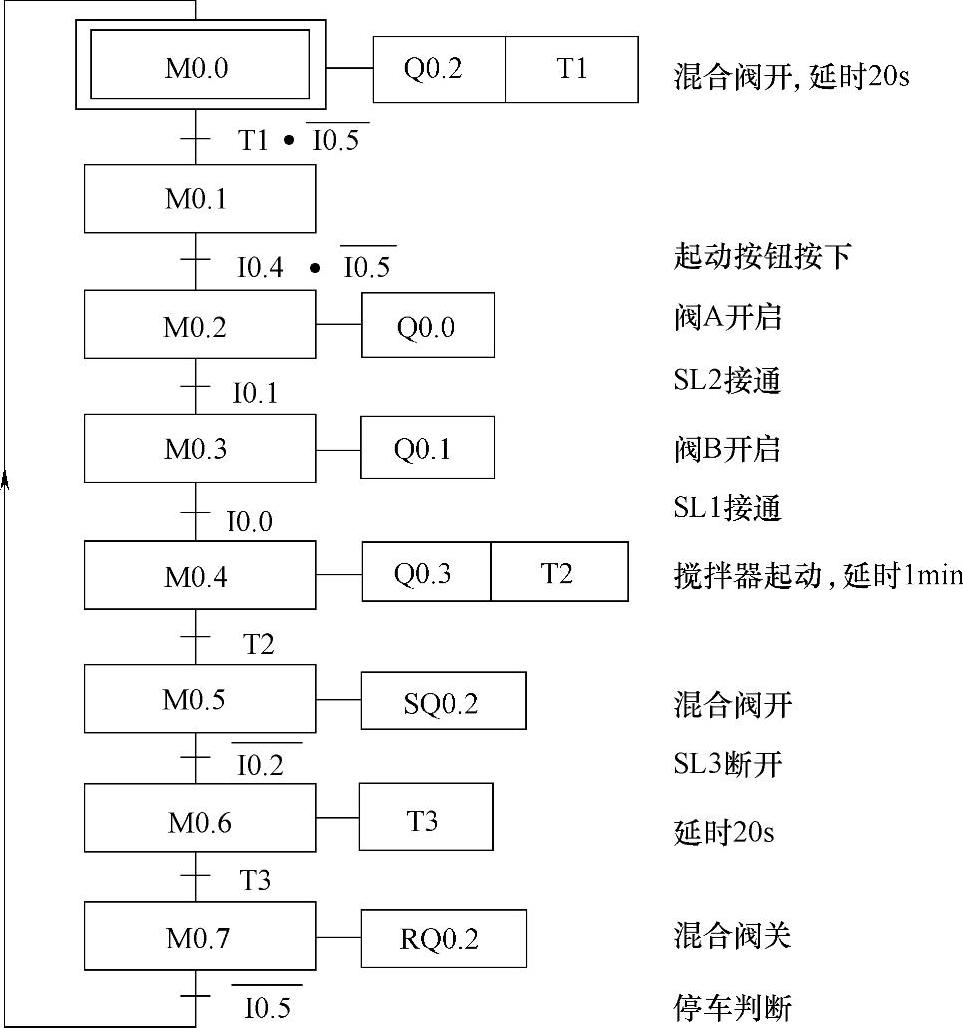
图5-63 顺序控制思路
(2)程序整体如图5-64所示

图5-64 液体自动混合主程序
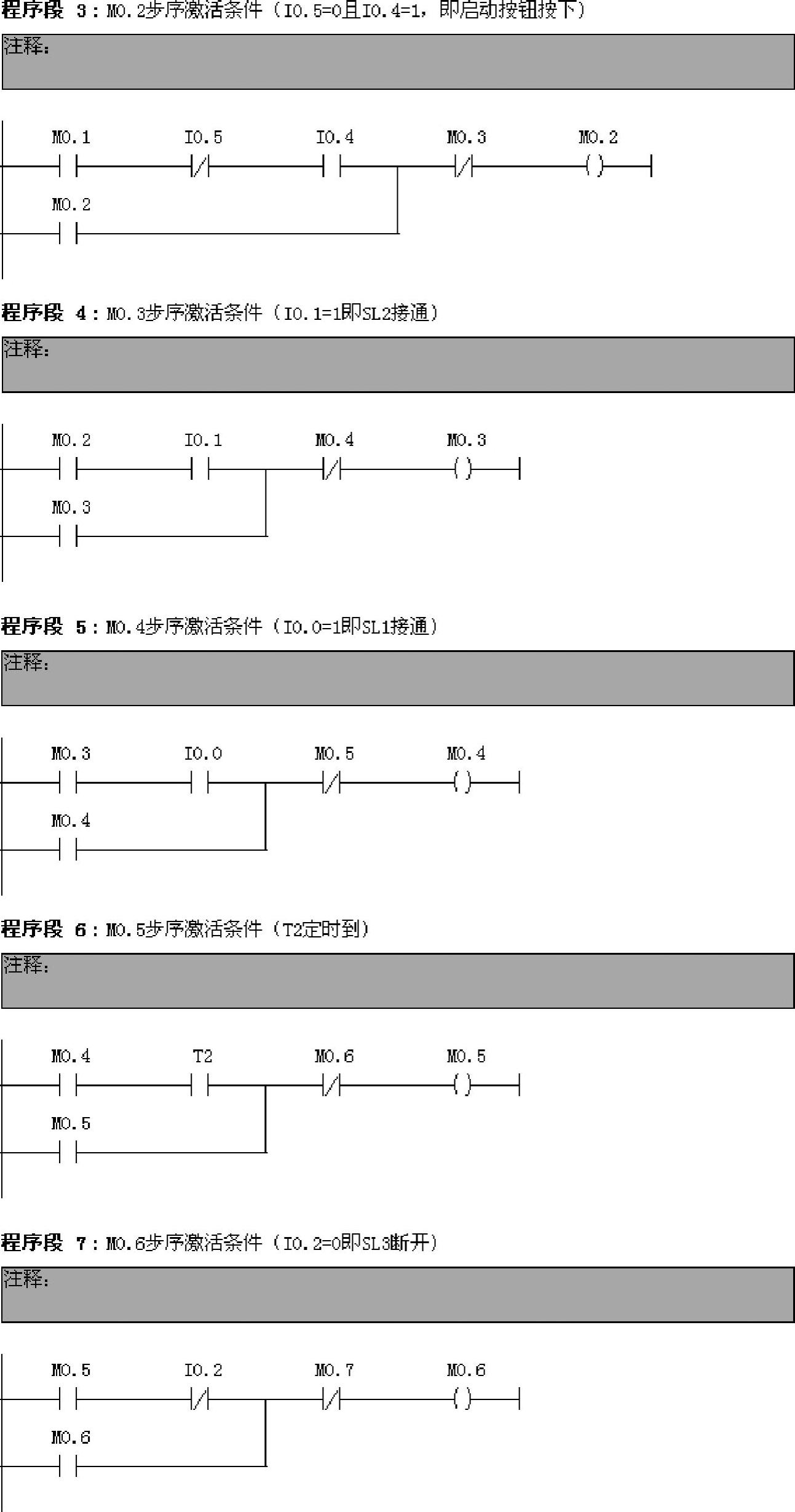
图5-64 液体自动混合主程序(续)
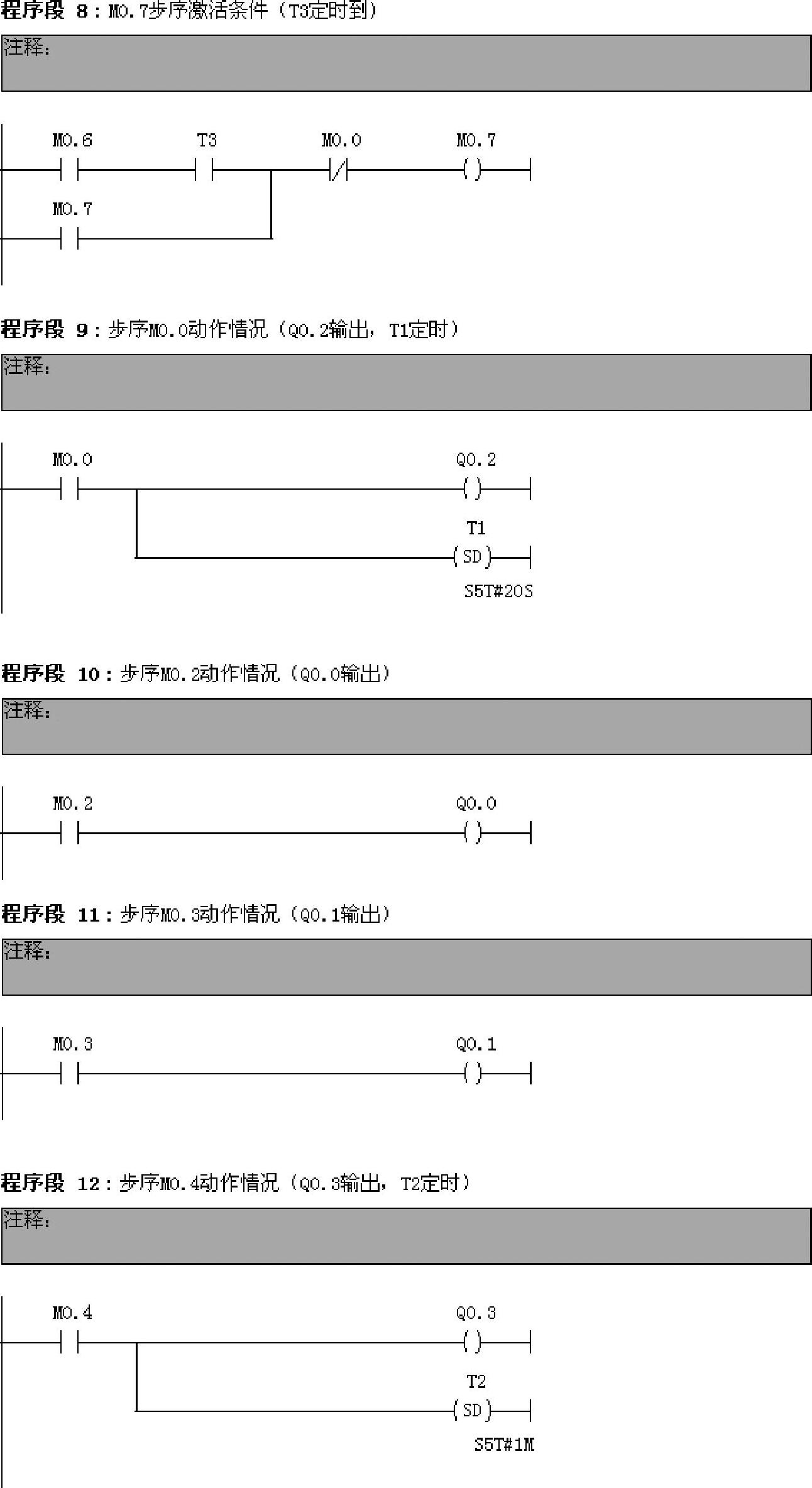
图5-64 液体自动混合主程序(续)
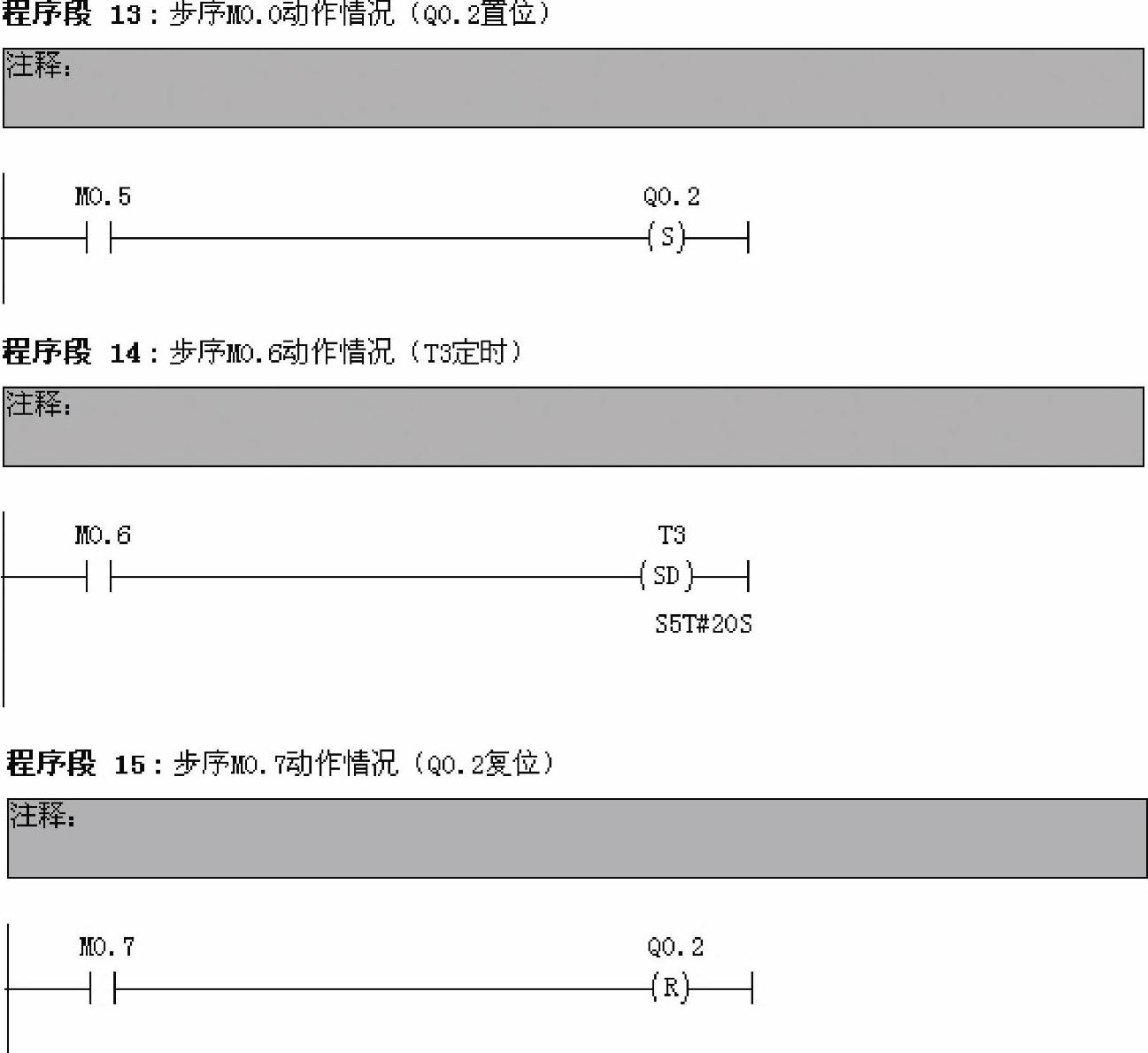
图5-64 液体自动混合主程序(续)