13.2.6 修复冗余
在插入运动类型和添加约束的工作做完后,有时会产生过约束的情况,使得运动仿真不能按照所要求的那样顺利进行。Inventor 2014的【机构状态】功能在这方面为用户带来了很大的方便,可以帮助查找并修复多余约束的情况。
注意
仅在“自动转换对标准联接的约束”选项未被激活时,此功能才可用。如果使用“自动转换对标准联接的约束”选项,软件将自动修复所有冗余。
单击【运动仿真】标签栏【运动类型】面板上的【机构状态】工具按钮 ,打开如图13-43所示【机械装置状态和冗余】对话框。“机械装置状态和冗余”对话框在【模型信息】栏中显示了机构的冗余度以及迁移度。
,打开如图13-43所示【机械装置状态和冗余】对话框。“机械装置状态和冗余”对话框在【模型信息】栏中显示了机构的冗余度以及迁移度。
具体的修复冗余步骤如下:
(1)在“机械装置状态和冗余”对话框的【封闭运动链】组中,单击【下一个链】图标直到【初始连接】列大于0。
(2)如果系统建议通过改变连接以删除多余约束,则该建议将显示在紧邻连接右侧的【多余约束】列中,而修改后的连接将显示在【最终连接】列中。
注意
如果想看到选定链的零部件在图形窗口中亮显,单击【亮显链的零部件】按钮。
(3)如果需要,可以使用垂直滚动条来移动建议更改的连接,直到它显示在窗口中。
(4)如果软件不能建议进行更改,则在【多余约束】列的顶部将显示一个警告图标。
注意
系统在找不到解决方案时,并不意味着没有解决方案。在【最终连接】列中,手动修改链中的某些连接也可以删除过约束。
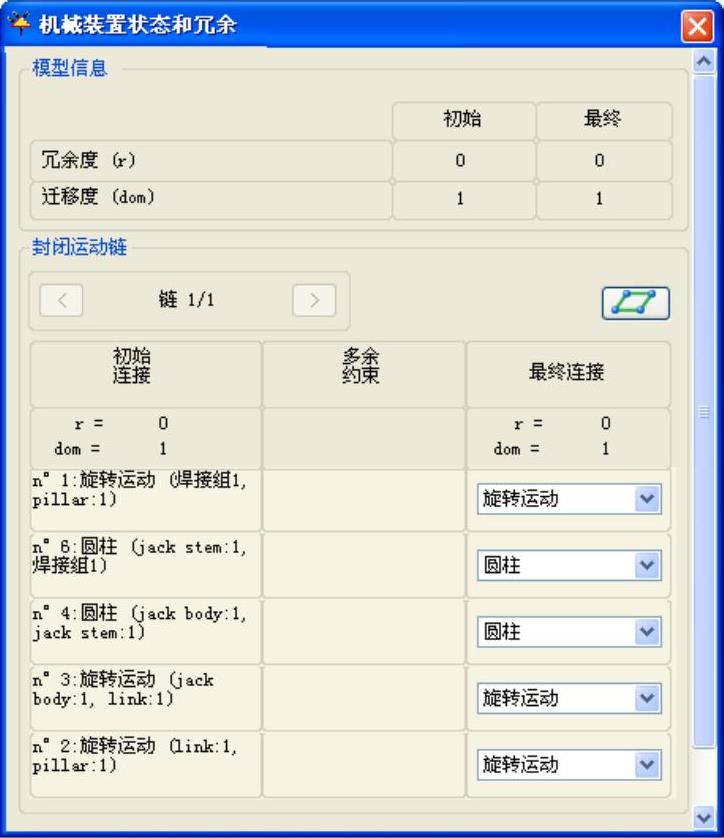
图13-43 【机械装置状态和冗余】对话框
(5)对所有过约束运动链重复步骤2和3。
(6)当模型信息组指明不再有任何多余约束时,单击【测试】按钮,进行测试。
(7)系统将尝试装配机构,如果不成功,会显示一条警告消息。
如果不想进行修改,还可以在单击【确定】之前随时单击【重设模型】。此时会使模型返回其原始状态。
(8)机构不再过约束时,单击【确定】按钮保存这些操作,完成修复。