20.2.2 智能太阳能追光系统的设计原理
2025年09月21日
20.2.2 智能太阳能追光系统的设计原理
本设计是基于单片机控制的自动跟踪系统,它利用光电跟踪原理,通过比较太阳能板中心垂线与太阳光线的角度大小来控制信号的输入,其采用4个光敏电阻做传感器,把光照强度转换为电阻阻值的变化,并通过光转换电路给单片机提供输入信号,经由处理器判断,输出信号给驱动电路,并由驱动电路来控制直流电动机,实现机械装置的方位角、高度角的调整。该机械装置主要采用机械传动原理实现,用两个电动机相互带动来实现方位角的旋转。
太阳能电池板可以360°自由旋转。控制机构将分别对东西方向和南北方向进行调整。单片机上电复位后,首先对整个系统进行预置定位,其次单片机将对两组光敏电阻采样进来的两个电平进行比较,若两电平相等,则电池板停止转动,若不等,单片机将对两电平进行比较判定,从而给出输出信号驱动直流电动机让太阳能板与之相对应转动,实现电池板对太阳的跟踪。
图20-1给出了本设计总体框架图,其由5大部分组成,包括光转换模块、单片机控制模块、电动机驱动模块、机械传动部件模块、应用子系统模块(可扩展)。其中,光转换模块由组1光采集模块(负责采集东西方向太阳光)和组2光采集模块(负责采集南北方向太阳光)两部分组成,电动机驱动模块由电机1(负责带动传动部件东西方向转动)、电动机2(负责带动传动部件南北方向转动)和电动机驱动电路组成。
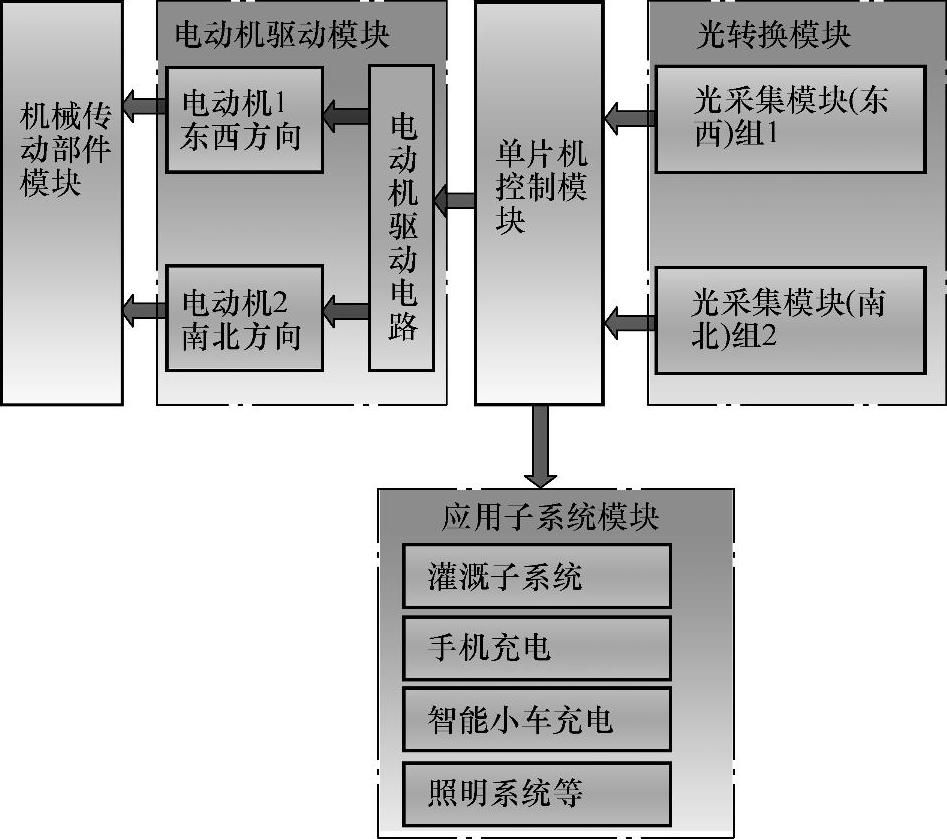
图20-1 智能太阳能追光系统总体框架