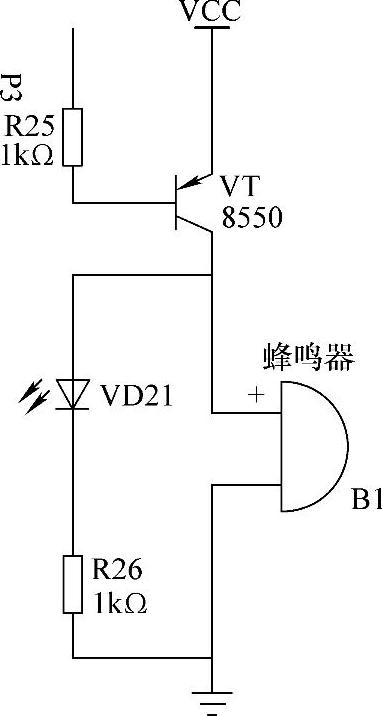
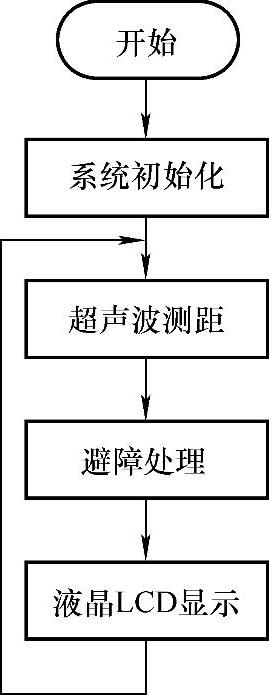
电源上电后,小车各模块进行初始化,在小车前方放一个障碍物,通过超声波传感器检测到小车与障碍物之间的距离,随后在液晶LCD显示屏上显示当前检测的距离,根据小车实际与障碍物间的距离进行对比。若小车前方障碍物与车身相距小于20cm,则蜂鸣器发出警报声,同时发光二极管发光,小车后退转弯;若小车相距已超出20cm,则蜂鸣器不发声且二极管熄灭,小车继续向前行驶。小车主程序的软件流程图如图23-7所示。
图23-6 蜂鸣器报警电路图
图23-7 主程序流程图
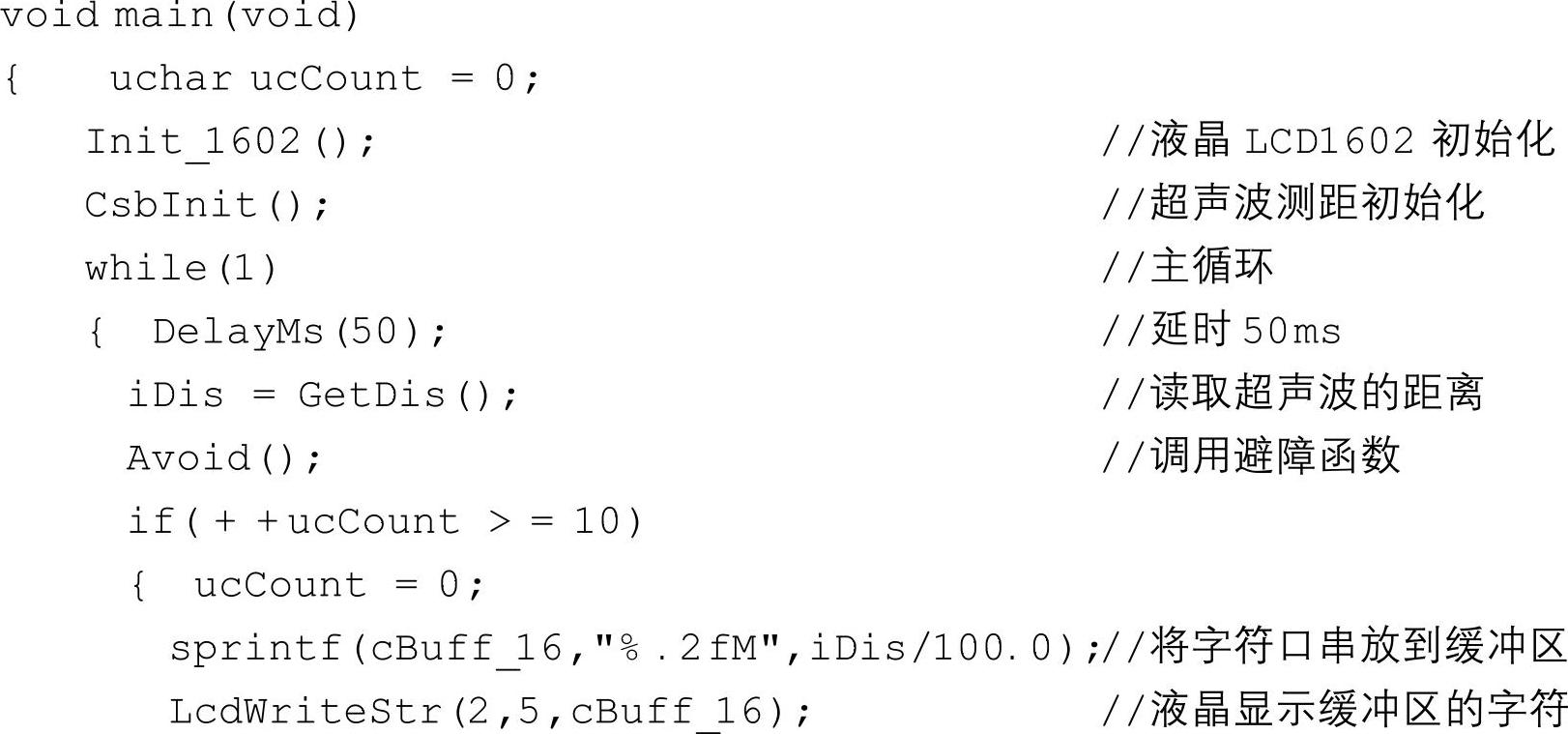
其关键程序代码如下: