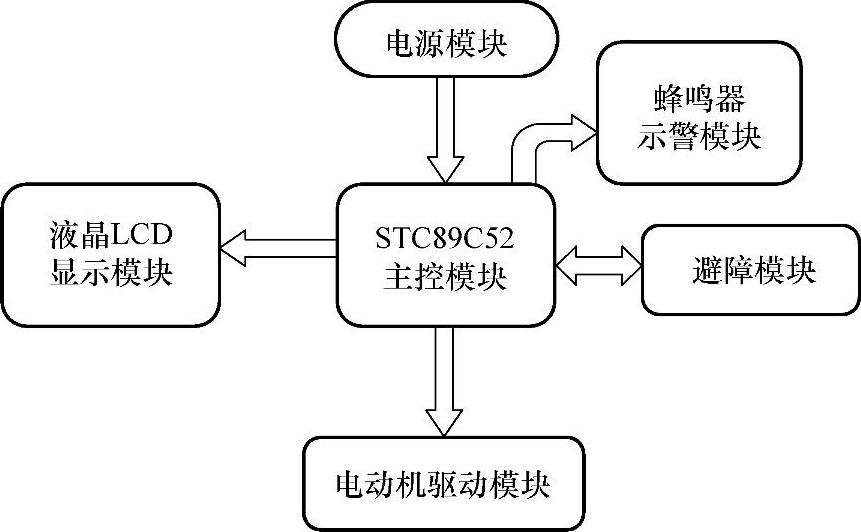
全自动智能避障小车系统主要是由单片机最小系统来实现控制,通过在小车的车头部位装载一个超声波探测头,然后利用发送超声波并接收反馈信号的时间差,计算前方与障碍物间的距离,从而给予单片机反馈,对小车的行驶方向加以控制,进而达到测距避障功能的实现,全自动智能避障小车系统分为硬件和软件两部分进行设计,系统整体方案,如图23-1所示。按照设计目标,本章将全自动智能避障小车系统分为硬件和软件两个部分进行设计。
图23-1 系统结构图