6.1.2 多项式不变矩
6.1.2.1 几何矩
在直角坐标系中,连续函数f(x,y)的p+q阶几何矩定义为

这种矩是将函数f(x,y)投影到xpyq上,其中基本集{xpyq}具有完备性、不正交性。
唯一性定理:如果函数f(x,y)分段连续,且只在(x,y)的有限区域有非零值,则所有阶的矩都存在。由f(x,y)可唯一确定矩序列{Mpq};反之,由矩序列{Mpq}也可唯一确定f(x,y)。
一幅图的面积必然有限和分段连续,因此,图像的所有阶矩必然存在,用这些矩描述图像具有唯一性。理论上,表征图像的所有信息,需要计算无限多矩值。而实际应用中,只需计算包含足够多图像信息的矩值子集就行。
下面分别介绍各低阶矩及其物理意义:
(1)零阶矩
由式(6-5)的定义可知,图像f(x,y)的零阶矩为

由上式可知,对于一幅灰度图像,M00表示图像所有灰度值的和;对于一幅二值图像,M00表示图像面积。
(2)一阶矩
图像f(x,y)的一阶矩M01和M10可用来表示图像重心。设图像重心坐标为 ,计算公式为
,计算公式为

对于二值图像(x,y)来说它表示几何中心。若把图像重心与坐标系原点重合,令 ,
, ,那么式(6-7)就为图像中心矩。这样计算出的矩就与图像坐标系无关。中心矩计算公式为
,那么式(6-7)就为图像中心矩。这样计算出的矩就与图像坐标系无关。中心矩计算公式为

由上式计算可得,一阶中心矩μ01,μ10满足μ01=μ10=0。
(3)二阶矩
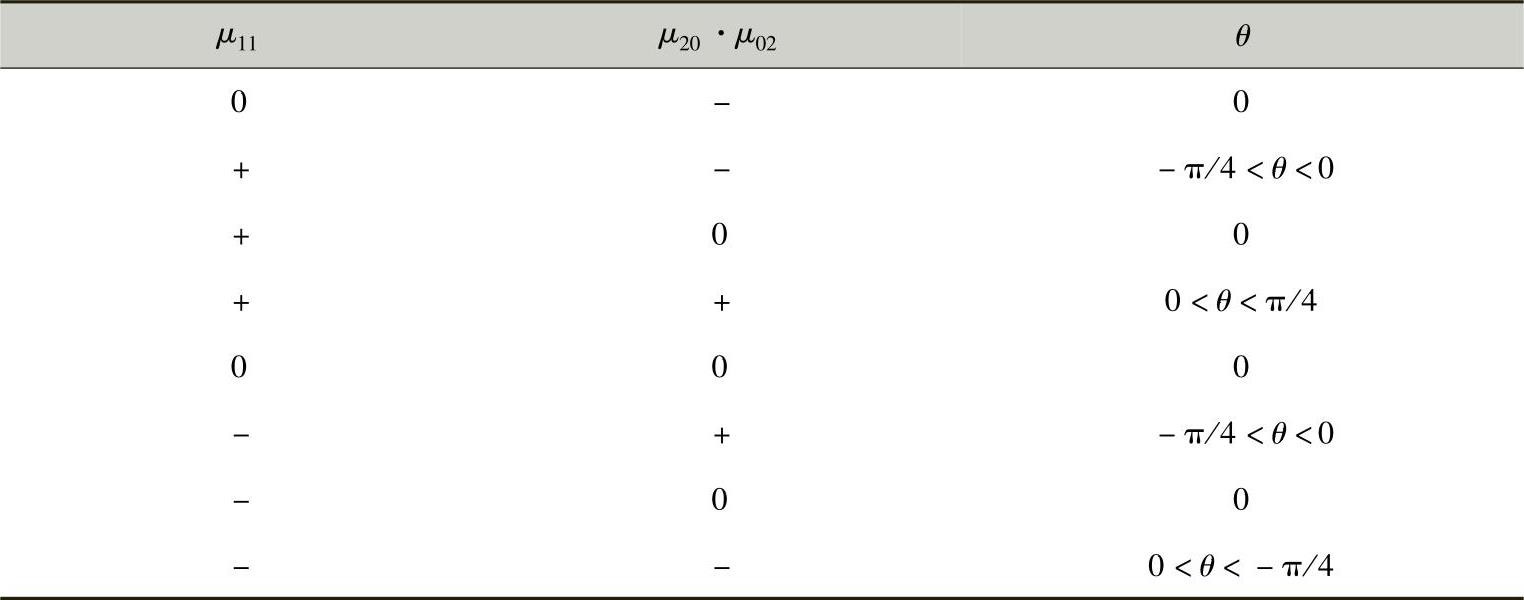
二阶中心矩μ02,μ20,μ11,又称惯性矩。可用来描述物体的主轴和椭圆等重要特性。物体目标的主轴由长轴和短轴组成,它们分别表示最大和最小二阶矩的方向。主轴的方向角θ的公式为

式中,θ为主轴与坐标轴的夹角,它的取值范围为 ,见表6-1。
,见表6-1。
表6-1 主轴方向的确定
需要说明的是,仅使用主轴角并不能确定物体目标的方向。比如物体旋转180°后,主轴的方向不变,这就需要利用三阶中心矩,只有这样才能唯一确定物体方向。由一、二阶中心矩还可确定一个图像椭圆。图像椭圆就是一个与原图像的二阶矩和灰度总和都相等的椭圆。椭圆有长半轴a和短半轴b,定义为


椭圆内的灰度表示为

为了便于分析图像性质,一般将图像重心与椭圆中心和主轴方向重合,如图6-1所示。
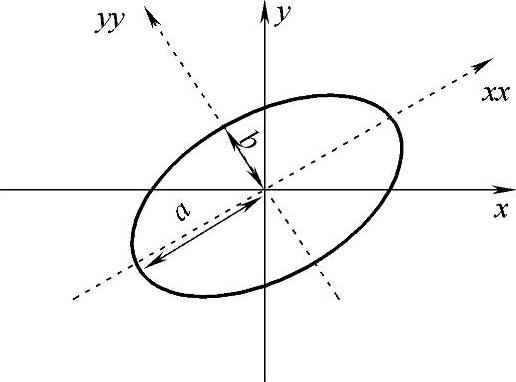
图6-1 图像椭圆
(4)三阶矩
三阶中心矩μ30和μ03描述图像投影后的扭曲程度。扭曲可用来衡量均值对称分布中的偏差程度。式(6-13)、式(6-14)为图像在x,y轴投影的扭曲系数计算公式:
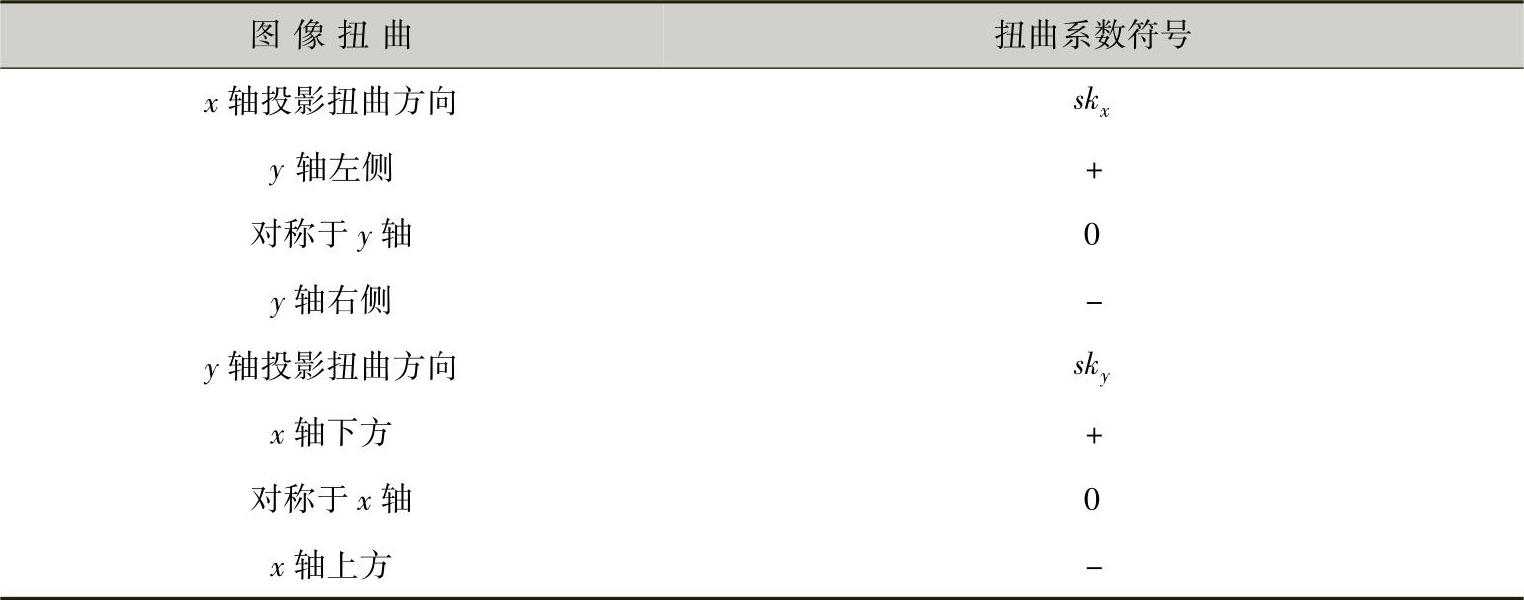
扭曲系数的正负与图像扭曲的关系见表6-2。对于前面提到的主轴方向的问题,是根据扭曲系数的正负来确定的。
表6-2 扭曲系数的正负与图像扭曲的关系
(5)四阶矩
四阶中心矩μ40和μ04又称投影峰度。式(6-15)、式(6-16)为图像在x,y轴投影的投影峰度系数计算公式:

式中,令峰度系数等于0,为高斯分布;小于0,为平坦而少峰的分布;大于0,为狭窄而多峰的分布。
几何矩经过简单变化,就可以满足平移、缩放和旋转不变性。
平移变换:将图像f(x,y)在x轴和y轴方向分别平移a和b,平移后的图像f′(x,y)表示为
f′(x,y)=f(x-a,y-b)(6-17)
图像f′(x,y)的p+q阶矩为

设数字图像为g(m,n),则式(6-18)变换为

平移前后矩Mpq和M′pq的关系为

由式(6-20)可得图像f(x,y)的p+q阶中心矩为

则平移变换前后有

比例变换:将图像f(x,y)在x轴和y轴方向分别缩放α,β倍,则比例变换后的新图像f′(x,y)为
f′(x,y)=f(x/α,y/β)(6-23)
变换前后的矩Mp′q和Mpq关系如式(6-24)、式(6-25)所示:
Mp′q=α1+pβ1+qMpqα≠β(6-24)
Mp′q=α2+p+qMpqα=β(6-25)
令M00=1就可实现图像比例归一化。对于二值图像,可以把图像面积的值设为1。实现归一化的尺度因子表示为

归一化后原点矩为

通过上述的处理方法,可得出具有比例(缩放)不变性的中心矩为

式中,
旋转变换:将图像f(x,y)绕坐标原点作逆时针θ角度旋转后,得到的图像f′(x,y)为
f′(x,y)=f[(xcosθ+ysinθ),(-xsinθ+ycosθ)](6-30)
旋转变换后图像f′(x,y)的p+q阶矩为

对于数字图像g(m,n),式(6-31)变为

旋转变换前后的矩Mpq和Mp′q的关系如下:

采用主轴法可以实现矩的旋转不变性。对于有唯一分布的主轴图像,计算它的各阶矩,这些矩在分布方向上是不变的。令μ11=0,可得到主轴。
归一化后标准矩定义如下:

6.1.2.2 Hu矩的构造
事实上,几何矩Mpq并不具有不变性;图像的中心矩μpq仅具有平移的不变性;归一化中心矩有多种构造方式。
方式一为

另一种方式为

归一化的中心矩ηpq具有平移和比例不变性,但不具有旋转不变性。针对这一问题,Hu在1961年给出了七个不变矩特征量,并证明了它们具有平移、比例不变性和旋转不变性的性质。七个不变矩多项式表达式为
M1=η20+η02(6-37)
M2=(η20-η02)2+4η211(6-38)
M3=(η30-3η12)2+(3η21-η03)2(6-39)
M4=(η30+3η12)2+(η21+η03)2(6-40)
M5=(η30-3η12)(η30+η12)[(η30+η12)2-3(η21+η03)2]+(6-41)
(3η21-η03)(η21+η03)[3(η30+η12)2-(η21+η03)2]
M6=(η20-η02)[(η30+η12)2-(η21+η03)2]+4η11(η21+η03)(η30+η12)
(6-42)
M7=(3η21-η03)(η30+η12)[(η30+η12)2-3(η21+η03)2]+(6-43)
(η30-3η12)(η21+η03)[3(η30+η12)2-(η21+η03)2]
由于七个不变矩值的变化范围很大,为了便于比较,可利用取对数的方法进行数据压缩。因此,实际采用的不变矩为
Mk=logMkk=1,2,…,7(6-44)
Hu不变矩的计算流程如图6-2所示。

图6-2 Hu不变矩的计算流程
表6-3为对坦克图片Hu矩的特征提取结果。
表6-3 坦克Hu矩特征提取结果
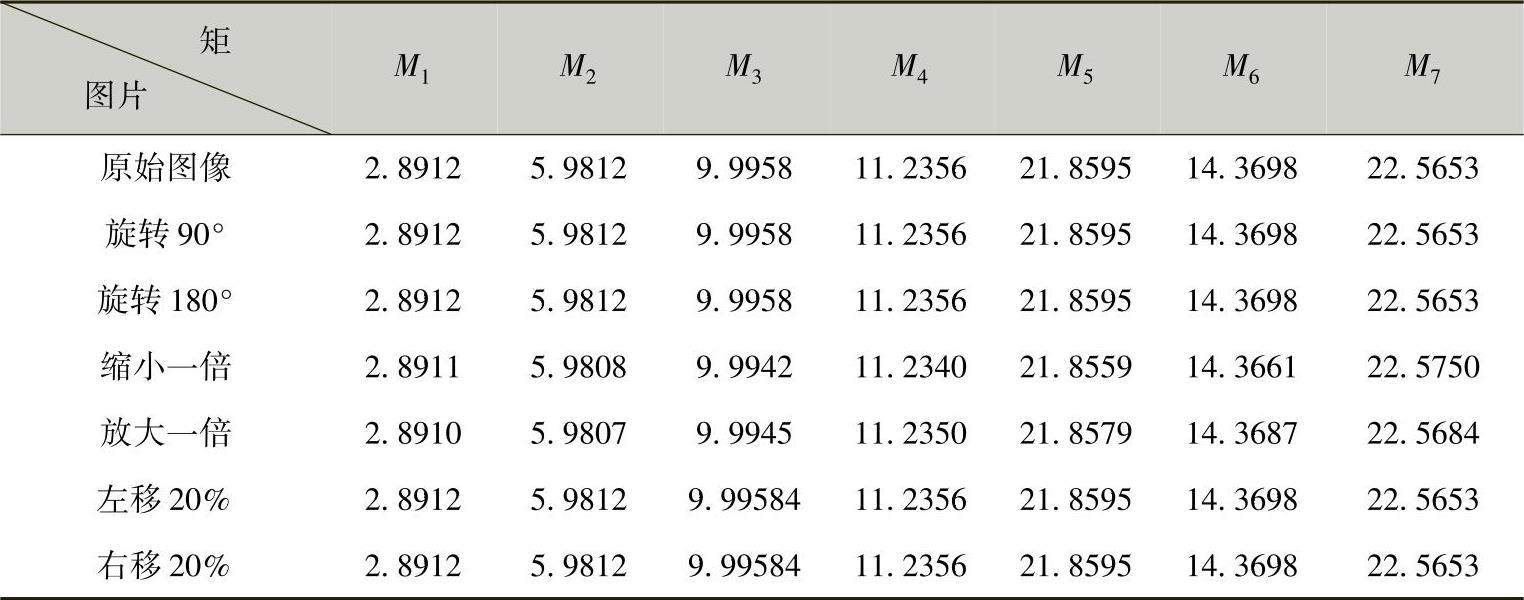
由表6-3中数据可知,通过对坦克图片进行旋转、尺度和平移变换,Hu矩提取的特征参数不发生变化,满足矩不变性。6.1.2.3 仿射不变矩的构造
Hu提出的不变矩具有平移、尺度和旋转不变性,但当由于拍摄角度不同,图像出现扭曲等变形时,这三个不变性并不能满足要求,因此需要构造一种目标发生扭曲、拉伸等仿射变换条件下的不变矩特征。此特征能用于不同拍摄角度下目标的识别。
仿射变换是一种典型的线性变换,它是通过不同的线性变换进行构造的。设图像平面上一点P的坐标为(x,y)和对应仿射变换坐标系中点P′的坐标为(x′,y′),则其二维的仿射变换公式如下:

式中, 是仿射变换矩阵。仿射变换矩阵A必须满足非奇异性条件,即
是仿射变换矩阵。仿射变换矩阵A必须满足非奇异性条件,即 是平移量,在二维矩阵空间中,矩阵A可以按扭曲、伸缩、尺度、旋转等进行构造。
是平移量,在二维矩阵空间中,矩阵A可以按扭曲、伸缩、尺度、旋转等进行构造。
尺度变换模型为

伸缩变换模型为

扭曲变换模型为

旋转变换模型为

因此,矩阵A可表示为

尺度、平移、伸缩、旋转和扭曲五个变换是仿射变换中的特例。
由仿射变换模型可知,如果一个特征量,在尺度、平移、伸缩、旋转和扭曲变换条件下仍然不发生变换,那么我们就认为该特征量是仿射不变量。
设图像f(x,y)仿射变换后的图像为fT(x,y),则仿射变换后图像的重心变为

把式(6-45)与式(6-51)相减,得

平移参数b1、b2被抵消掉。
由前面的内容可知,归一化中心具有比例、平移和旋转不变性。若利用归一化中心矩来构造仿射不变矩,只需要满足扭曲和拉伸不变性,就可达到仿射变换不变性。我们可以构造中心矩多项式,来抵消仿射变换矩阵A,就可满足常用的仿射不变性。构造多项式的方法有配极多项式、Hankel行列式、多项式判别式等方法。本章采用JanFlusser等人构造的6个仿射不变矩,作为目标图像的特征不变量,进行目标识别。
I1=(μ20μ02-μ211)/μ400(6-53)
I2=(μ230μ203-6μ30μ03μ21μ12+4μ03μ231+4μ30μ312)/μ0100(6-54)
I3=(μ20(μ21μ03-μ212)-μ11(μ30μ03-μ21μ12)+μ02(μ12μ30-μ221))/μ700 (6-55)
I4=(μ230μ203-6μ220μ11μ12μ03-6μ220μ02μ21μ03+9μ220μ03μ212+12μ20μ211μ21μ03+
6μ20μ11μ02μ30μ03-18μ20μ11μ02μ21μ12-8μ311μ03μ30-6μ20μ202μ30μ12+
9μ20μ202μ221+12μ211μ02μ30μ12-6μ11μ022μ30μ21+μ302μ230)/μ0101(6-56)
I5=(μ40μ04-4μ13μ31+3μ222)/μ600(6-57)
I6=(μ04μ22μ40+2μ13μ22μ31-μ04μ231-μ40μ213-μ232)/μ090(6-58)
仿射不变矩的计算流程如图6-3所示。

图6-3 仿射不变矩的计算流程
表6-4为坦克图片仿射不变矩提取结果。
表6-4 坦克图片仿射不变矩的特征提取结果
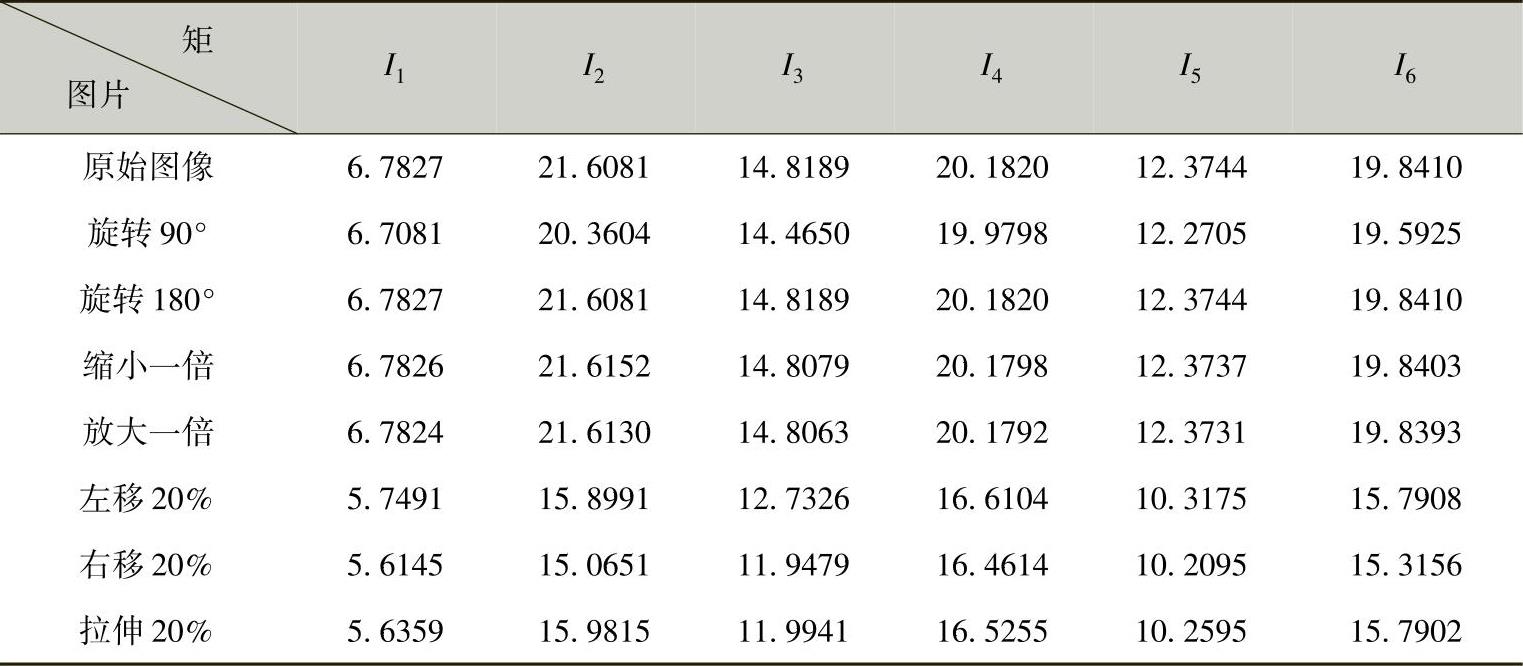
由表6-4中数据可知,当对坦克图片进行旋转、放缩变换时,仿射不变矩不发生变化,对图片进行平移和拉伸变换时,提取的特征参数基本不发生变化,满足矩不变性。