6.2.2 目标区域分割和检测
由红外和可见光传感器的成像图像特点可知,红外图像具有较强的目标位置的检测能力,而可见光图像对目标的细节信息把握较强,因此,可以结合两种传感器的优势,对地面目标进行检测和特征提取,用于分类识别系统中。
首先,利用红外传感器检测出目标区域,这里计算目标的最小外接矩形,然后把目标区域映射到可见光图像中,确定可见光图像的目标区域,再对目标区域分别进行特征提取,由于红外图像的结构特征较明显,先对红外图像进行二值化处理,对处理后的图像进行形状矩特征提取;对于可见光图像,能够很好地反映图像的细节信息,先对目标区域进行边缘检测,而后对检测后的图像进行边缘特征提取。最后对不同传感器提取的特征进行特征融合,利用融合后的特征进行目标分类识别。具体的框图如图6-5所示。
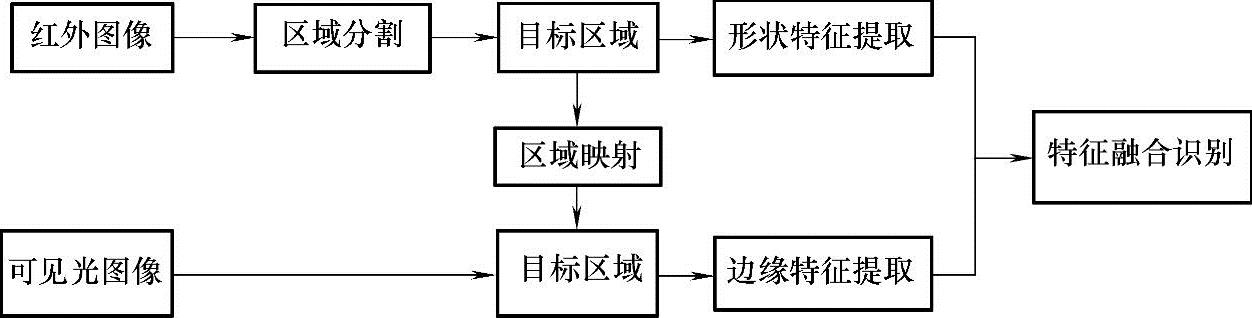
图6-5 红外和可见光图像特征融合示意图
6.2.2.1 红外图像的区域分割
从红外图像的灰度图中可看出,感兴趣目标区域与背景中的路面的灰度相差不很明显,若采用简单的阈值分割算法,若选取的阈值过低,则路面会被看成感兴趣目标而被分割出来,不仅提高了目标的虚警率,使后续特征提取的计算量也大大增加;若选取的阈值过高,则分割后目标区域过小,这样映射到可见光图像中,目标的轮廓特征丢失,这样提取的目标特征不准确。
因此,本章采用区域生长的图像分割方法对图像中感兴趣区域进行分割。区域生长法是一种基于某个或某些区域的串行图像分割技术,基本思想是把具有相似灰度级像素集合在一起构成目标区域。首先在要分割的目标区域找一个种子像素点,把该点作为区域生长的起点,然后按照一定的规则,把种子像素周围邻域中像素点与种子像素进行比较,若相同或相近则把该点合并到种子像素所在的区域;依次进行比较,直到不能找到满足条件的像素点为止。这样就得到目标区域。
区域生长法的3个重要因素包括:
1)确定能正确代表所需区域的种子像素。
2)制定在生长过程中能将相邻像素包含进来的准则。
3)指定让生长条件停止的条件或规则。
种子像素点选取可根据具体问题进行分析而定。由于红外图像的目标辐射较大,可以选择图像中最亮(灰度级最大)的像素点为种子像素。生长准则的选取与具体问题本身无关,是由所用的图像数据决定的。
本章采用的区域生长法的选取准则如下:
1)种子像素点的选取:选取图像中灰度最亮点作为种子像素点。为了避免将强背景噪声选为种子像素点,在选点之前,对原红外图像进行平滑处理。平滑处理选取的模板为1/4{{0,1,0}{1,0,1}{0,1,0}}。
2)生长准则的确定:根据红外图像灰度分布的特点,采用基于区域灰度差的生长准则,即在种子像素点的八邻域内的像素,按照下式准则进行处理:

式中,d(x,y)是种子像素点八邻域内的点;g(x,y)是分割后的二值化图像,若d(x,y)满足条件,即作为新的种子像素点进行区域生长;max(v)为最大值;v0为满足区域生长条件的门限,这里选取:

实验发现,m可以在5~8之间任意选择,对最终的分割结果影响不大。
3)生长方式的确定:以像素作为基本单位逐行扫描进行操作。扫描流程如图6-6所示。
采用区域生长的图像分割算法,不仅避免了采用直方图统计阈值分割方法需要复杂的处理步骤,而且还避免了采用全局阈值分割图像时引入背景噪声的问题。这样提取的目标感兴趣区域更准确。6.2.2.2 可见光图像区域分割
针对可见光图像难以获得目标区域的问题,本章利用红外图像能检测目标的优势,利用红外图像确定目标区域,然后利用图像配准,将红外图像的目标区域映射到可见光图像中的目标区域。
本章提取的目标感兴趣区域为红外分割后目标轮廓的最小外接矩形。最小外接矩形的确定方法是对二值化后的红外目标图像进行扫描,找到最左边和最右边,最上边和最下边的坐标,这样构成一个矩形。为了避免目标的边缘模糊,在宽中分别增加了5个像素点。经过区域分割后的可见光和红外图像的感兴趣区域如图6-7所示。
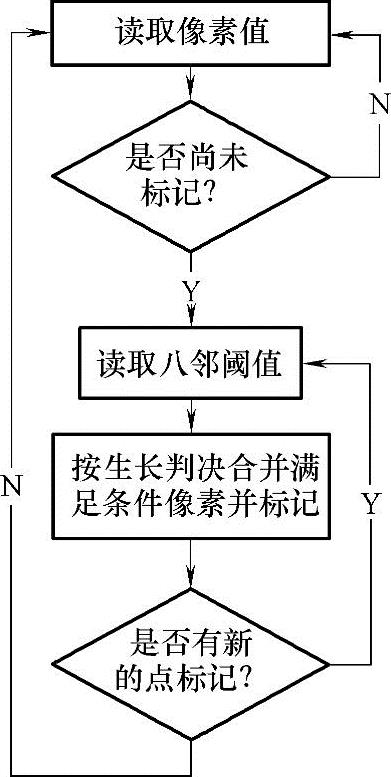
图6-6 区域生长法流程
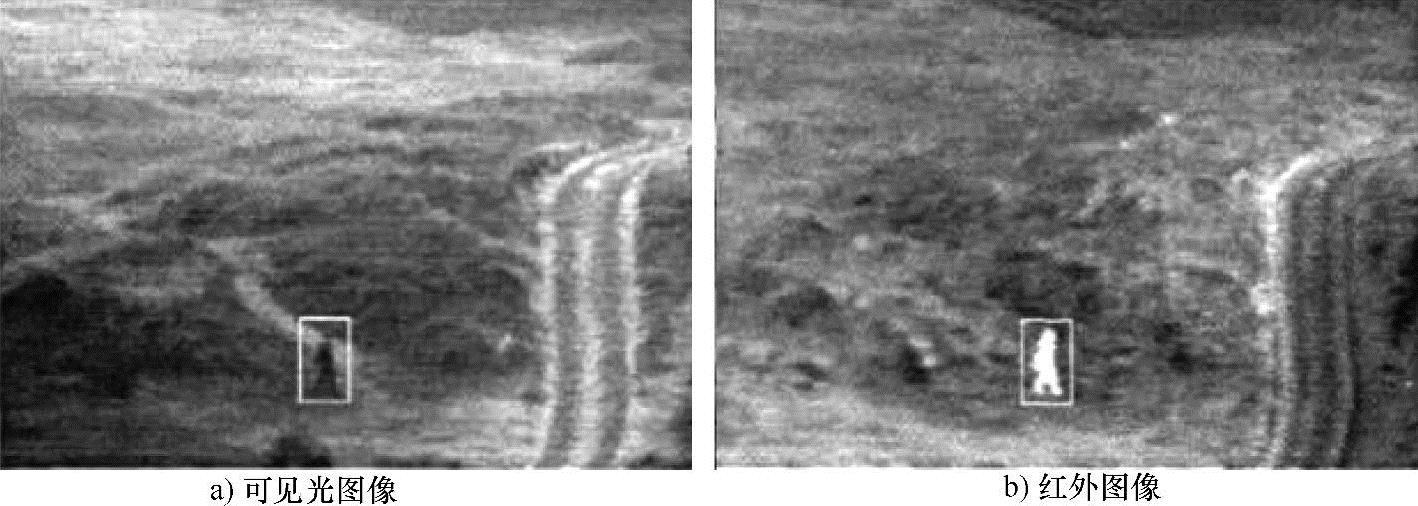
图6-7 可见光和红外图像