8.4.3 实验结果与分析
2025年09月26日
8.4.3 实验结果与分析
为衡量本章融合算法的效果,使用上述方法分别提取红外图像和可见光图像的特征组成特征向量,根据主成分分析的原理融合特征,并在VisualC++6.0环境下进行仿真实验。对图7-3预处理后的图像提取特征,标准化并进行主成分分析特征融合的数据见表8-1。
计算前10个主成分的贡献率以及特征值的累计贡献率,计算结果见表8-2。其中F1是“信息最多”的指标,称为第一主成分;F2为信息第二多的指标,称为第二主成分,以此类推。
表8-1 图7-3特征提取、标准化并进行主成分分析特征融合的数据
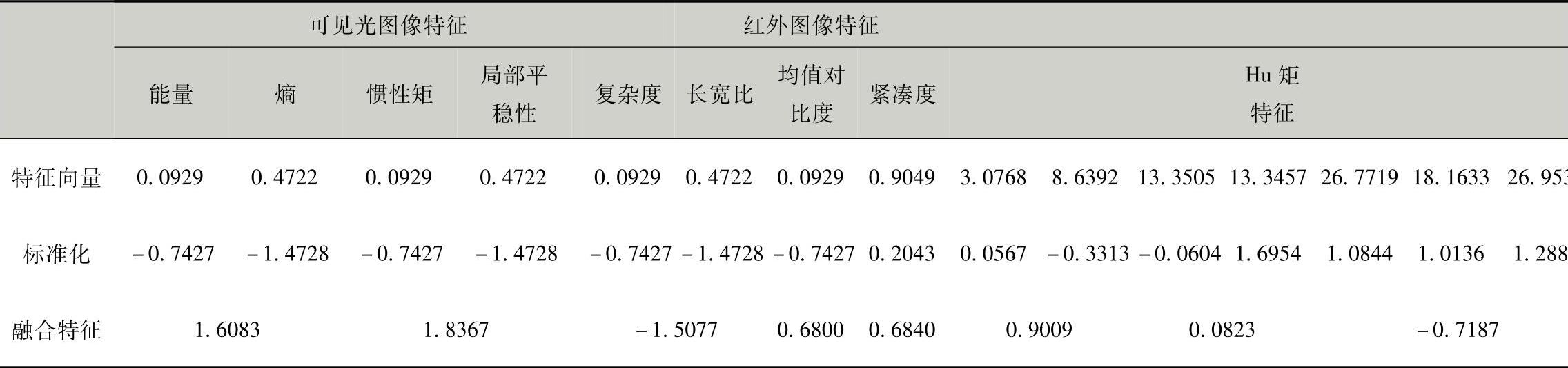
表8-2 前10个主成分的贡献率以及特征值的累计贡献率
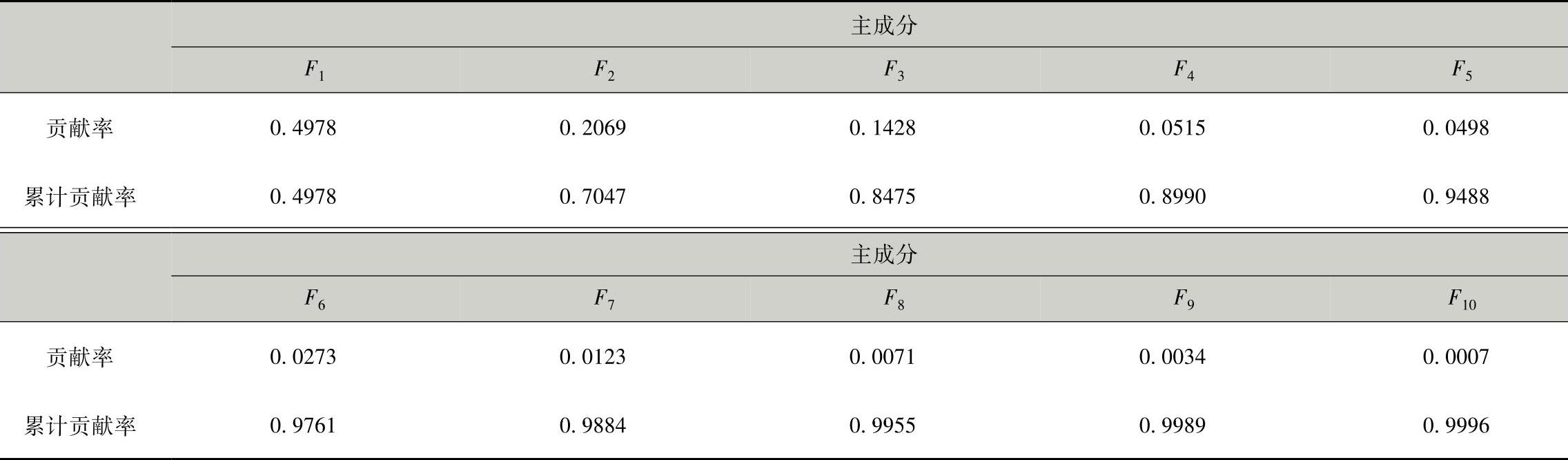
通过对主成分分析特征数据融合得到的各主成分的贡献率(见表8-2)及累计贡献率的分析(见图8-3和图8-4)表明,经过主成分分析特征融合后的特征向量大于或等于8维时,特征向量的累计贡献率不再发生变化,充分说明主成分分析融合后8维向量可以99.55%地表示融合前15维特征向量。当贡献率设为99%时,特征的主成分个数为8个,实现了特征量的有效降维。
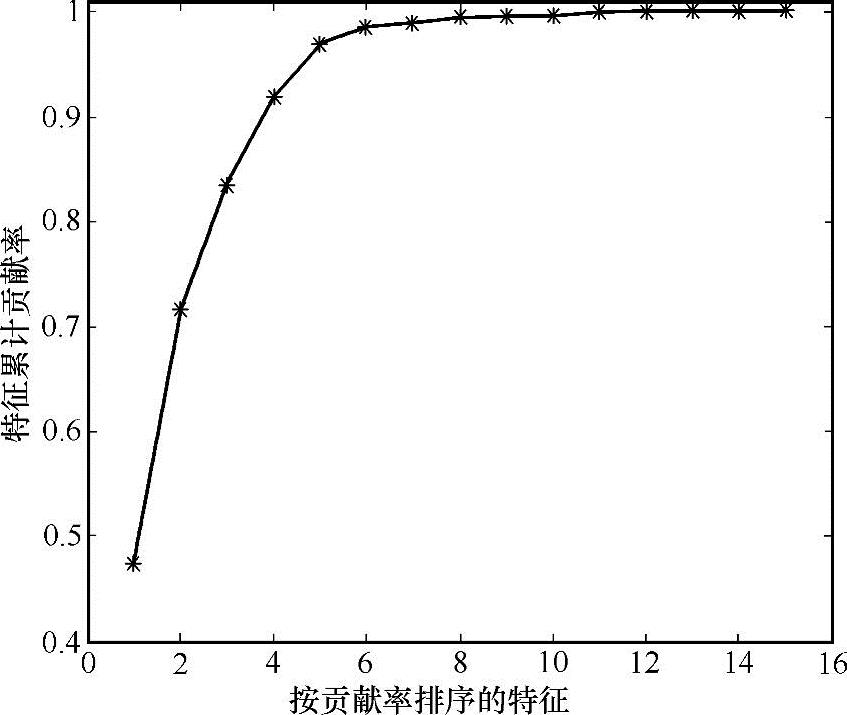
图8-3 各主成分累计贡献率
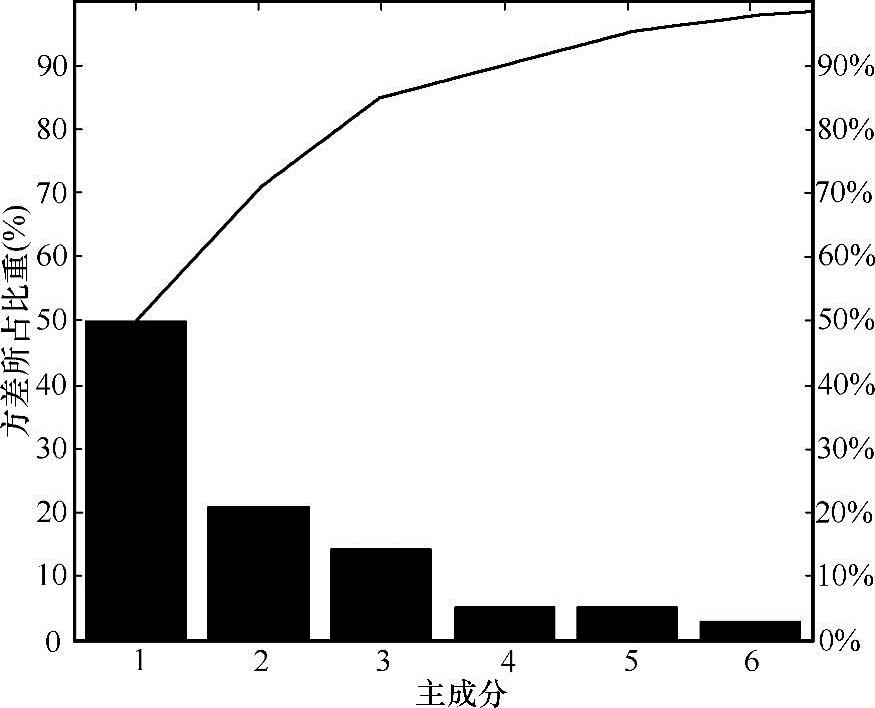
图8-4 各主成分方差的Pareto图
最后,在VisualC++6.0环境中分别使用传统的串联法和主成分分析方法进行融合识别实验。其中,主成分分析方法选择贡献率大于99%的特征值为主特征,两种方法使用支持向量机识别目标的识别率见表8-3。比较分析表8-3中的实验数据可以看出,传统串联法虽然特征维数多,但识别率相对较低,这是因为特征之间存在冗余,影响了识别的准确率;而基于主成分分析的红外与可见光图像特征融合方法,在未降低目标识别率的前提下,减少了系统运行时间,改善了整个识别系统的效率。
表8-3 算法识别率比较
