10.6 实验结果与分析
实验中选取人、汽车、卡车和飞机四类目标,而我们还没有找到此方面公开的标准融合识别数据库,于是通过自行采集红外摄像机和CCD照相机的源图像,并且对源图像进行预处理,建立了上述四类目标的红外与可见光融合识别数据库,其中每类目标有90组红外和可见光图像,尺寸均为256像素×256像素。每类目标的第1,3,5,…,89幅图片组成训练集,第2,4,6,…,90幅图片组成测试集。数据库的部分图像如图10-1所示,上面一行为可见光,下面一行为红外图像。
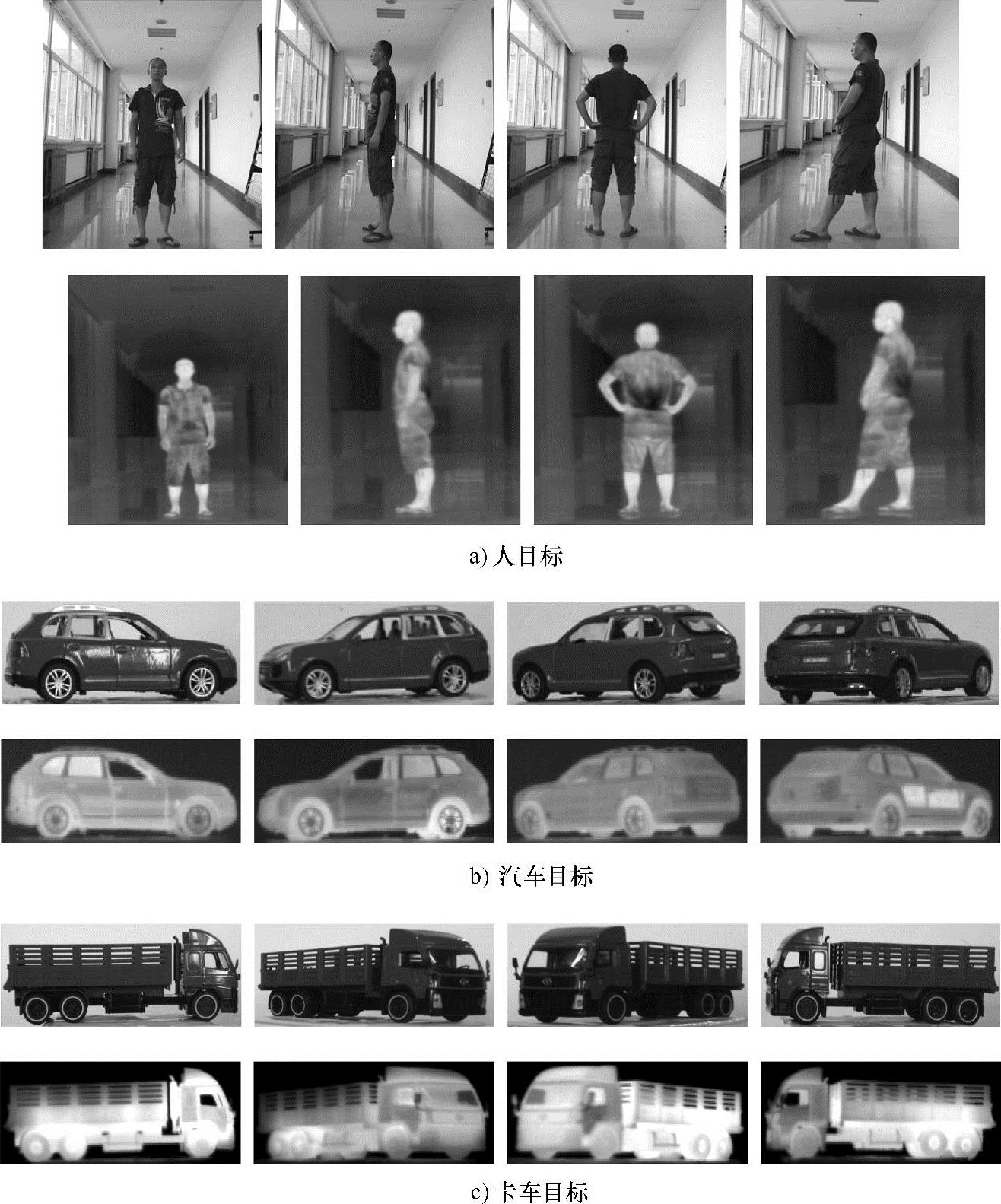
图10-1 可见与红外融合识别数据库部分图像
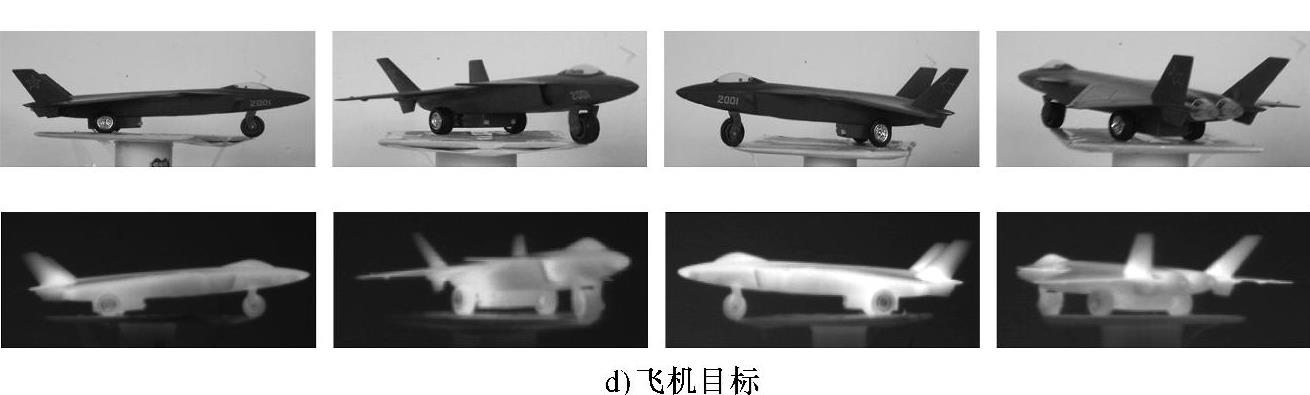
图10-1 可见与红外融合识别数据库部分图像(续)
首先,对可见光和红外图像进行增强、滤波、分割等预处理,然后对处理后的图像进行特征提取,提取的图像特征包括灰度共生矩阵、Hu不变矩、仿射不变矩、小波矩和Zernike矩。
提取图10-1中部分可见光图像的灰度共生矩阵特征值见表10-1,其特征值曲线如图10-2所示。
表10-1 灰度共生矩阵特征值
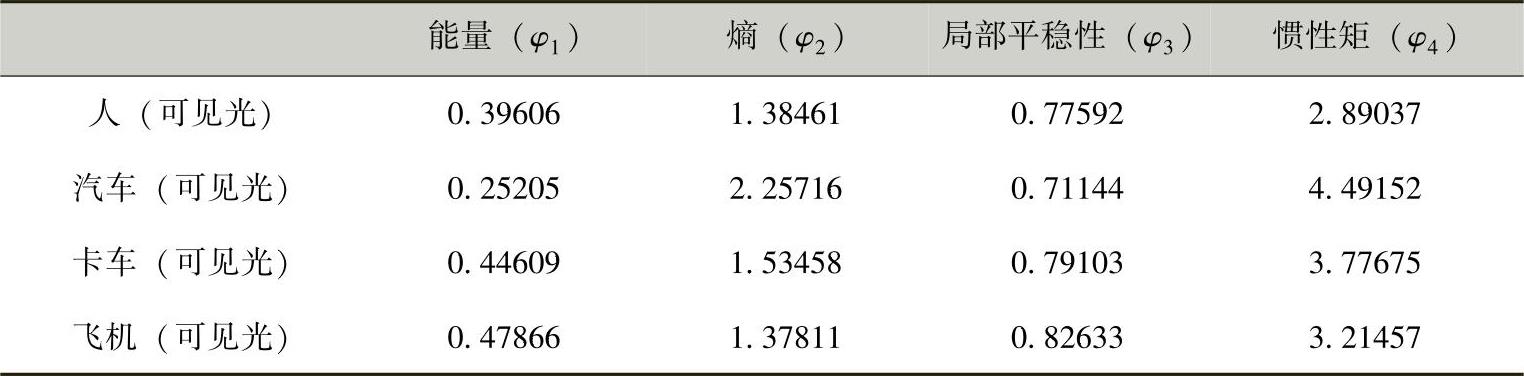
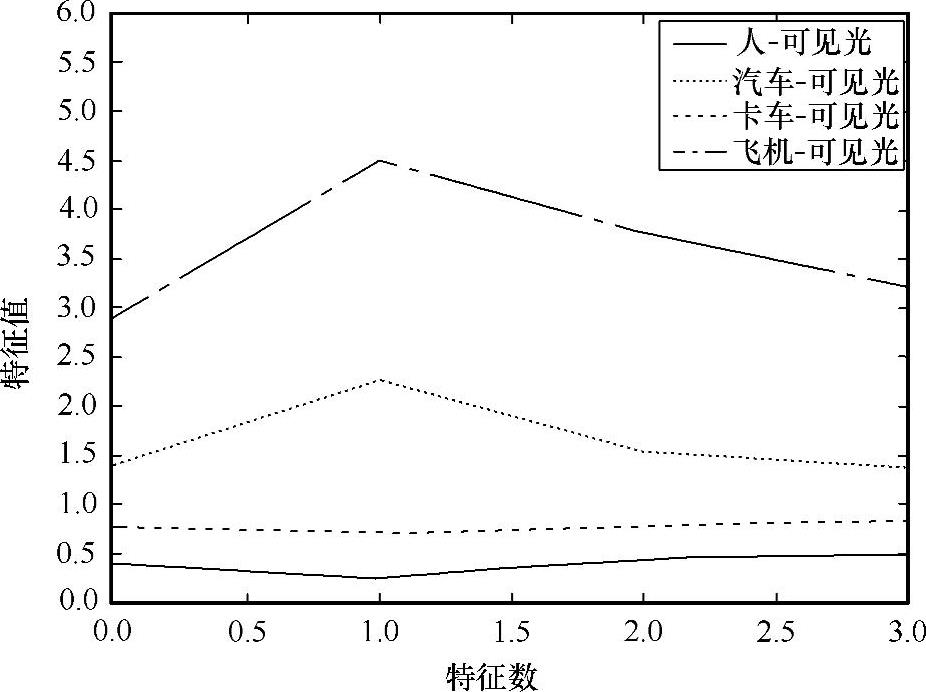
图10-2 灰度共生矩阵的特征值曲线图
提取图10-1中部分可见光与红外图像的Hu不变矩特征值见表10-2。
表10-2 Hu不变矩特征值
提取图10-1中部分可见光与红外图像的仿射不变矩特征值见表10-3。
表10-3 仿射不变矩特征值
提取图10-1中部分可见光与红外图像的小波不变矩特征值见表10-4。
表10-4 小波不变矩特征值
提取图10-1中部分可见光与红外图像的Zernike不变矩特征值见表10-5。
表10-5 Zernike不变矩特征值
由表10-1~表10-5的特征数据可以看出,四种特征提取方法提取的特征数据都在不同程度上与其他目标有区别,能够把两个不同的目标区分开,但是不同目标的同一特征之间存在着相似性和冗余性,这样在识别的时候就会受到干扰,容易影响识别结果。由表10-3和表10-4可以看出,提取的仿射不变矩和小波矩特征都有很好的聚类性,不同目标之间距离较大,区分性较强。灰度共生矩阵也有很好的聚类性和区分能力。由表10-3可以看出,Hu不变矩随着矩阶数的增加,它的特征值有增加的趋势,计算量也随之增大。Zernike矩随着阶数的增加相似性也随之增大,冗余信息增多。
由以上分析可知,如果只是单纯地把目标特征串联在一起直接用于识别,那么就会受到冗余特征的干扰,不能对目标有很好的区分效果。所以有必要在识别之前对特征进行融合处理,也可以称作特征选择,选出能用于区分目标的有效特征,降低特征维数,去除冗余信息,提高识别效率,同时也减少计算量。
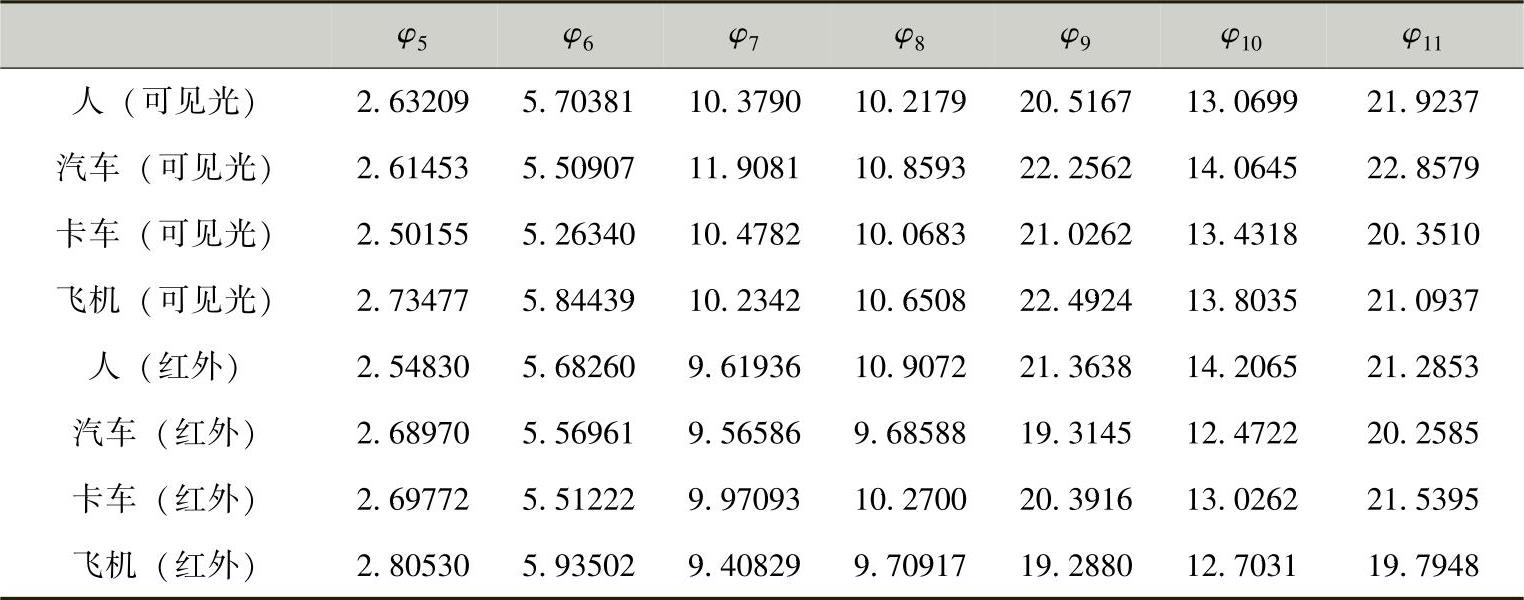
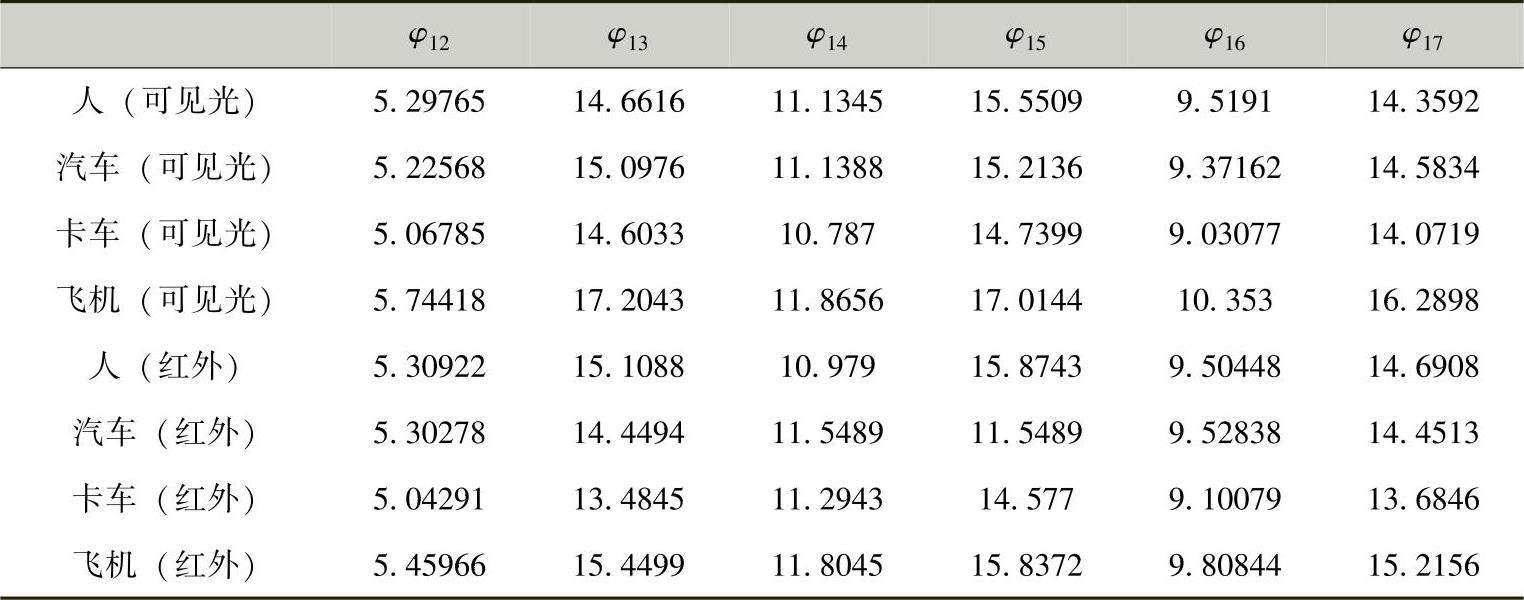
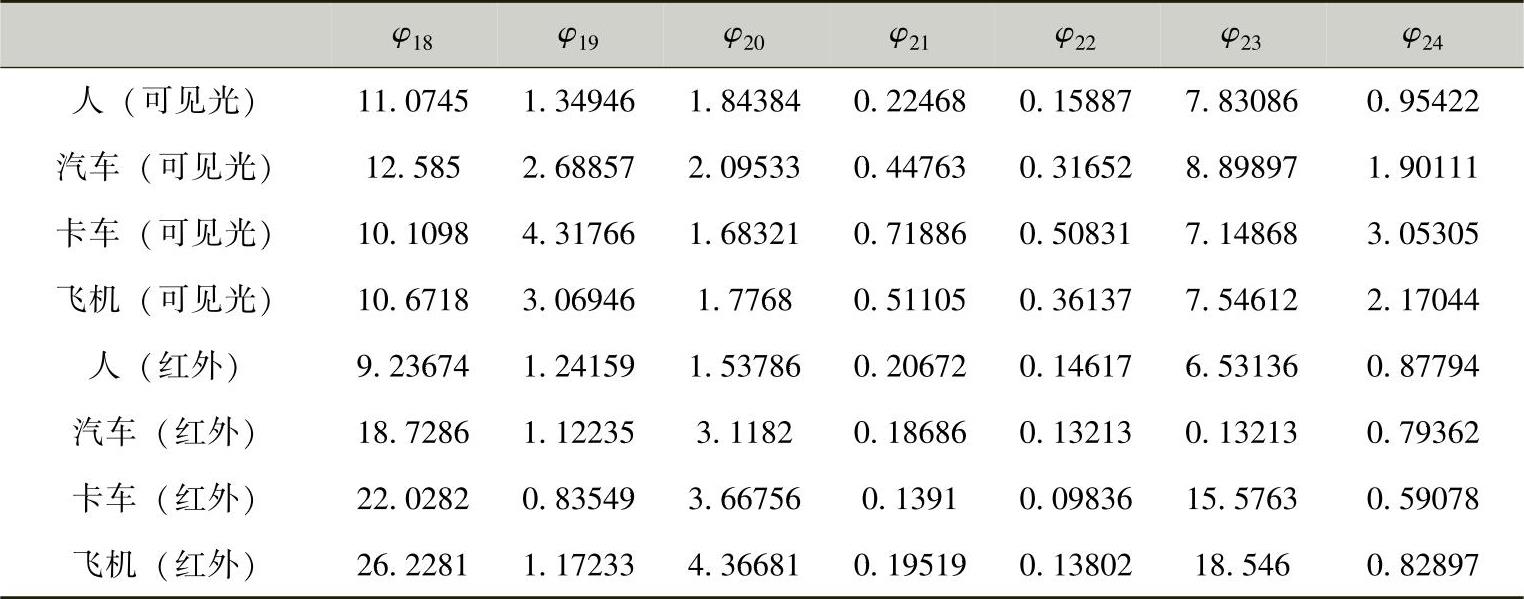
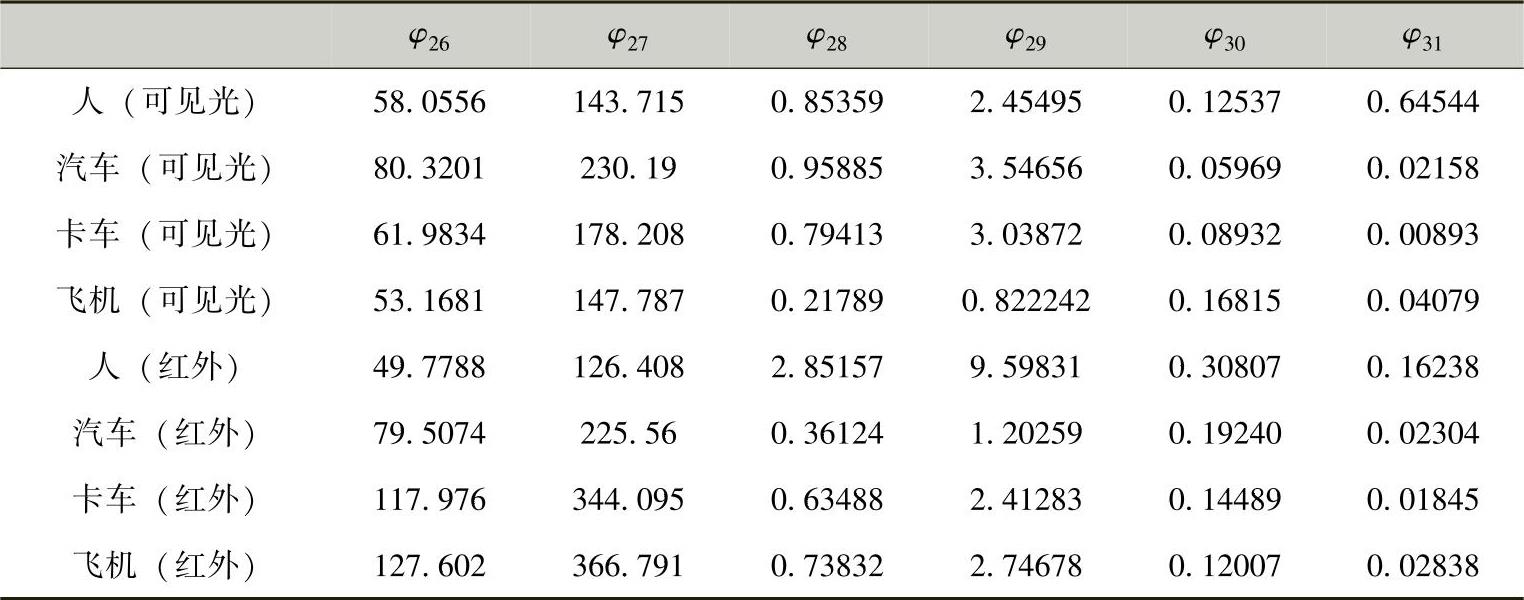
选取可见光图像的灰度共生矩阵、Hu矩和红外图像的小波矩特征作为实验数据,实验在MATLAB7.1环境中进行,表10-6为FastICA方法提取出的独立成分。
表10-6 对特征数据提取的独立成分

(续)

最后,在MATLAB7.1环境中对传统的串联法和快速固定点ICA方法进行融合识别实验。使用支持向量机方法对两种方法的融合特征进行分类识别,识别率见表10-7。
表10-7 算法识别率比较
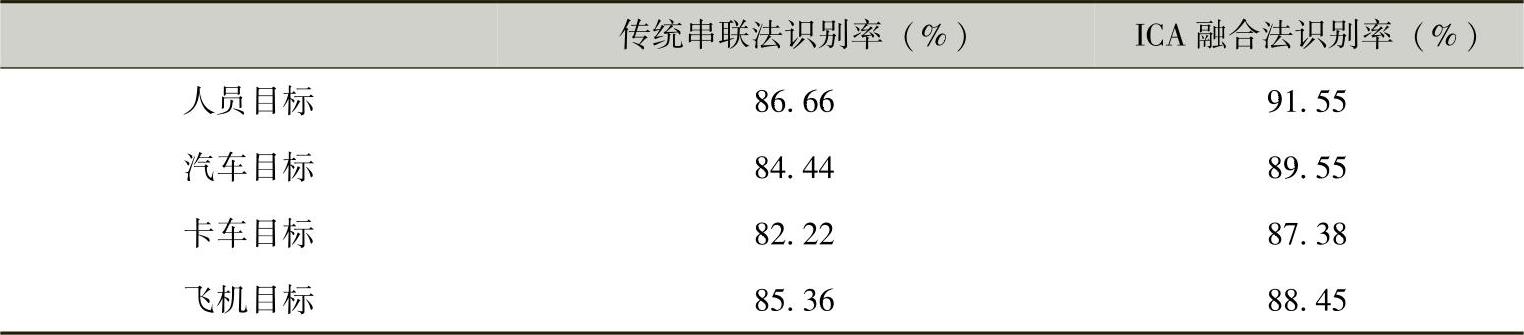
分析比较表10-7中的数据可以看出,快速固定点ICA方法比传统的串联算法识别率要高,有更好的性能。