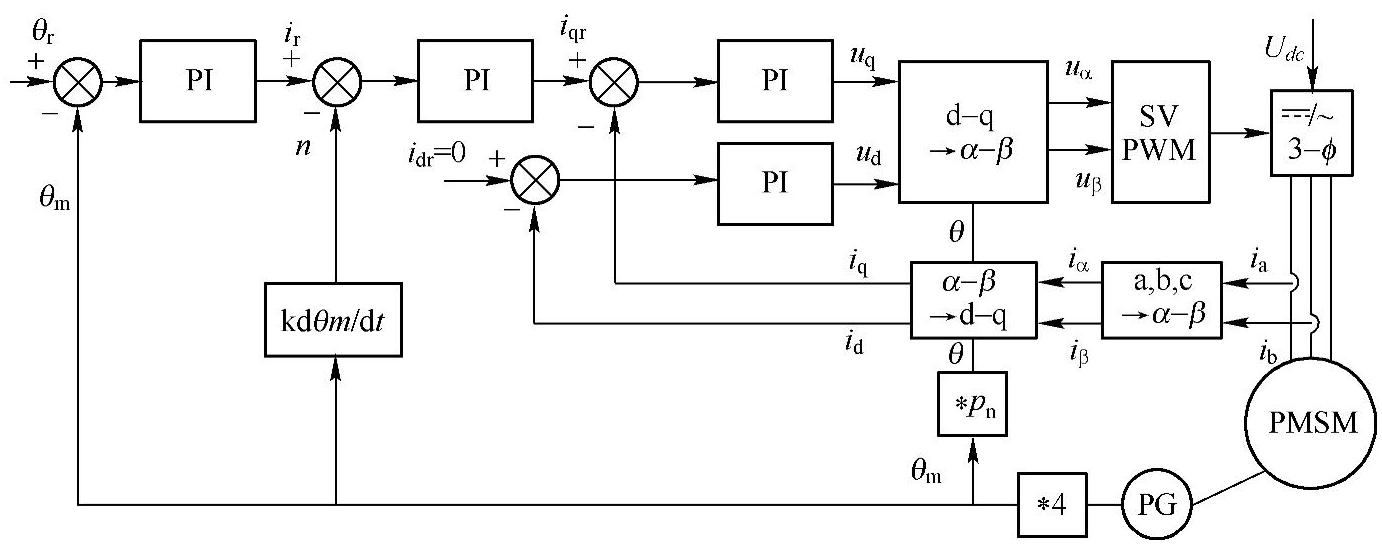
永磁同步电动机(PMSM)位置伺服系统的控制原理如图15-9所示。系统的位置环、速度环与电流环全部由软件实现,均采用数字PI调节器。坐标变换矢量控制、空间矢量PWM等均由软件完成。位置检测采用增量式光电编码器,转速n由机械位置θm微分求得。去掉外面的位置环可以实现速度伺服系统的控制。(https://www.daowen.com)
图15-9 数字伺服系统控制原理框图