要点52 掌握“马鞍形”焊缝埋弧焊机的技术要点
在压力容器、锅炉、化工容器、核电站设备焊接结构的制造中,经常会碰到管-管“横接”的实例,如图2-101~图2-104所示。
从几何的角度看,一直径较小圆管(俗称子管)与一直径较大圆管(俗称母管)相互垂直相贯时(图2-105)接口焊缝的相贯线像一马鞍的形状。在实际焊接生产中,习惯称其为“马鞍形”焊缝。
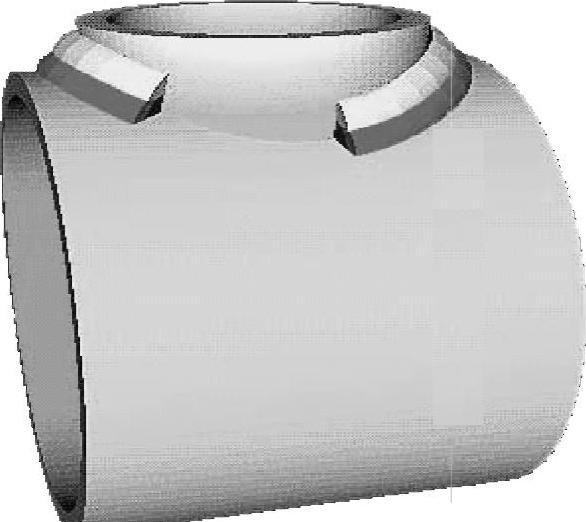
图2-101 “马鞍形”焊缝构成示意图
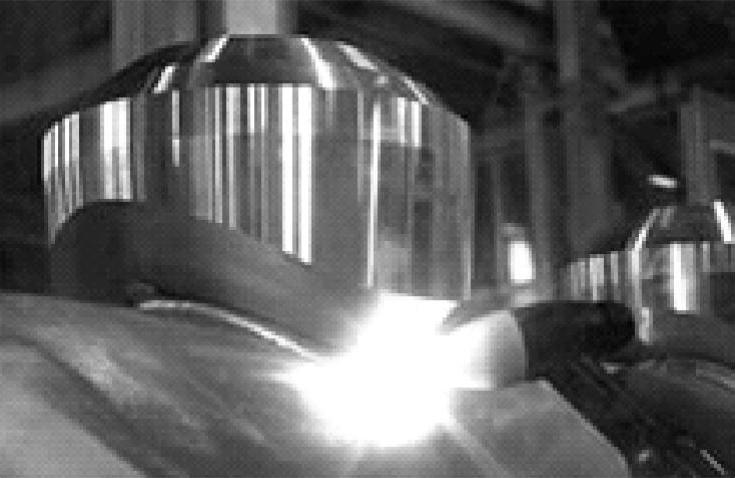
图2-102 “马鞍形”焊缝的坡口

图2-103 锅炉汽包的“马鞍形”焊缝
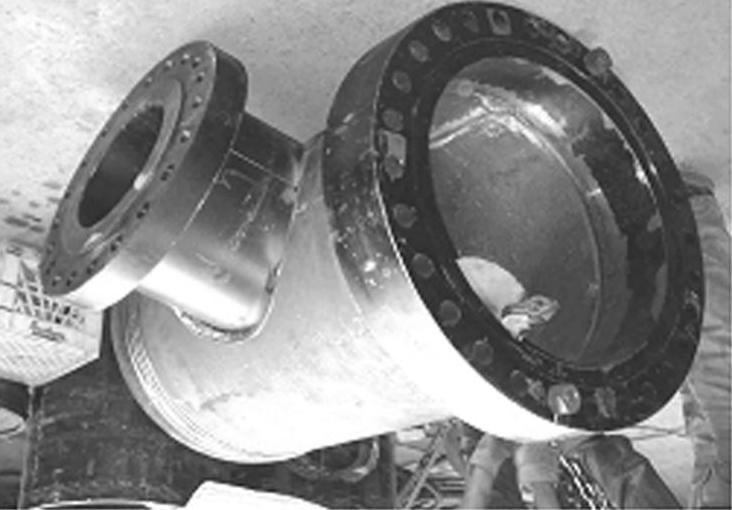
图2-104 管三通的“马鞍形”焊缝
1.“马鞍形”焊缝焊机焊嘴的位置伺服特点
1)“马鞍形”焊缝每道焊道施焊时,自动焊机焊头的焊嘴要依某一恰当的偏摆角度围绕子管旋转(图2-106中的变量R)。
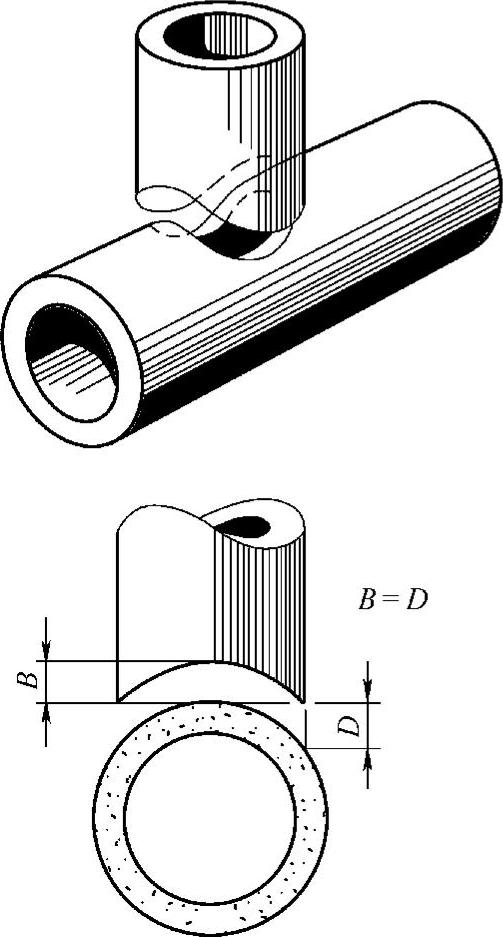
图2-105 “马鞍形”焊缝的几何解释
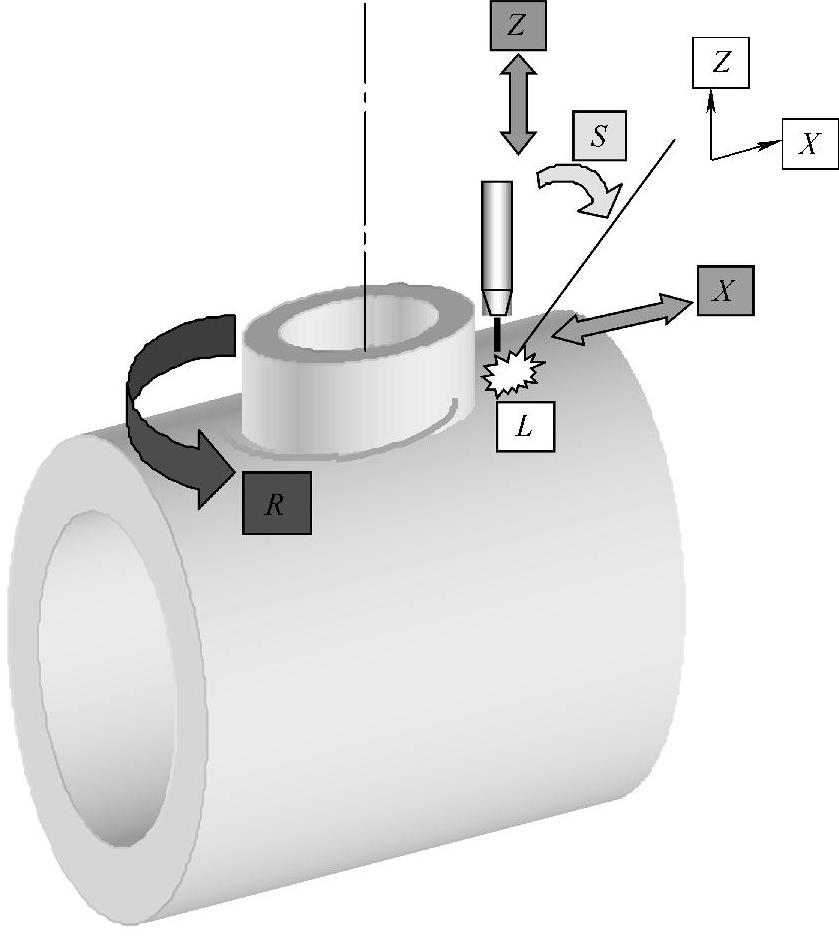
图2-106 “马鞍形”焊缝焊机焊嘴的动作伺服
2)焊头要随着“马鞍形”焊缝轨迹高度的变化而自动调整焊头的高度,以保持一定的弧长(图2-106中的变量Z)。
3)由于厚壁焊件的“马鞍形”焊缝往往是多道多层焊缝,因此除打底焊道外,完成每层焊道还要求调整焊头的横向移动距离(图2-106中的变量X)。
4)每层中的每道焊道的施焊,焊嘴都应有恰当的偏摆角度(图2-106中的变量S)。
2.“马鞍形”焊缝坡口特点
一般有“马鞍形”焊缝的焊件,多为大厚度钢板件,这些焊件又都是对焊接质量要求极高的重要压力容器类。因此对焊缝坡口的准备质量要求就十分严格;以锅炉汽包的“马鞍形”焊缝坡口准备(图2-107、图2-108)为例:锅炉汽包筒体上的“马鞍形”焊缝坡口和接管头焊缝坡口,都要求在气体火焰切割、等离子弧切割(粗加工)后,再进行机加工,一般是使用大型镗、铣床。

图2-107 筒体(母管)焊缝坡口

图2-108 子管焊缝坡口加工
3.焊道次序特点
对“马鞍形”焊缝的焊道次序,一般根据焊件的具体情况,都事先严格规定好。例如图2-109中,对开好了V形坡口的焊缝,设计了五层、共15个焊道,焊道次序如图2-109所示。设计好的焊道次序就做为调节焊机各个动作伺服的依据。
4.“马鞍形”焊缝焊机架的特点
“马鞍形”焊缝焊机架有半自动焊机架(图2-110)与全自动焊机架(图2-111)两种类型。
前者,焊嘴偏摆角调节、每层焊道焊嘴的提升调节都是以手动方式进行;随着数控技术、微(计算)机控制技术的推广应用,国内外已相继研制出微机控制“马鞍形”焊缝SAW(埋弧焊)焊机(图2-112)、“马鞍形”焊缝FCAW(药芯焊丝电弧焊)全自动焊机。这种微机控制“马鞍形”焊缝埋弧焊机在人工对中子管中心线后,每道焊缝的焊接,除需人工清渣外,都是自动进行的,即连每层焊道的搭接量和一层上焊缝的搭接量都可以由微机自动调节、储存,这就减少了大量重复焊接状况的调机时间。图2-113是其自动焊机的机架机械伺服结构。(https://www.daowen.com)
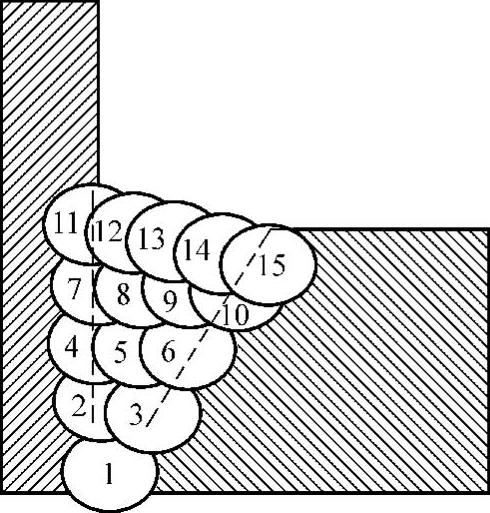
图2-109 “马鞍形”焊缝焊道安排
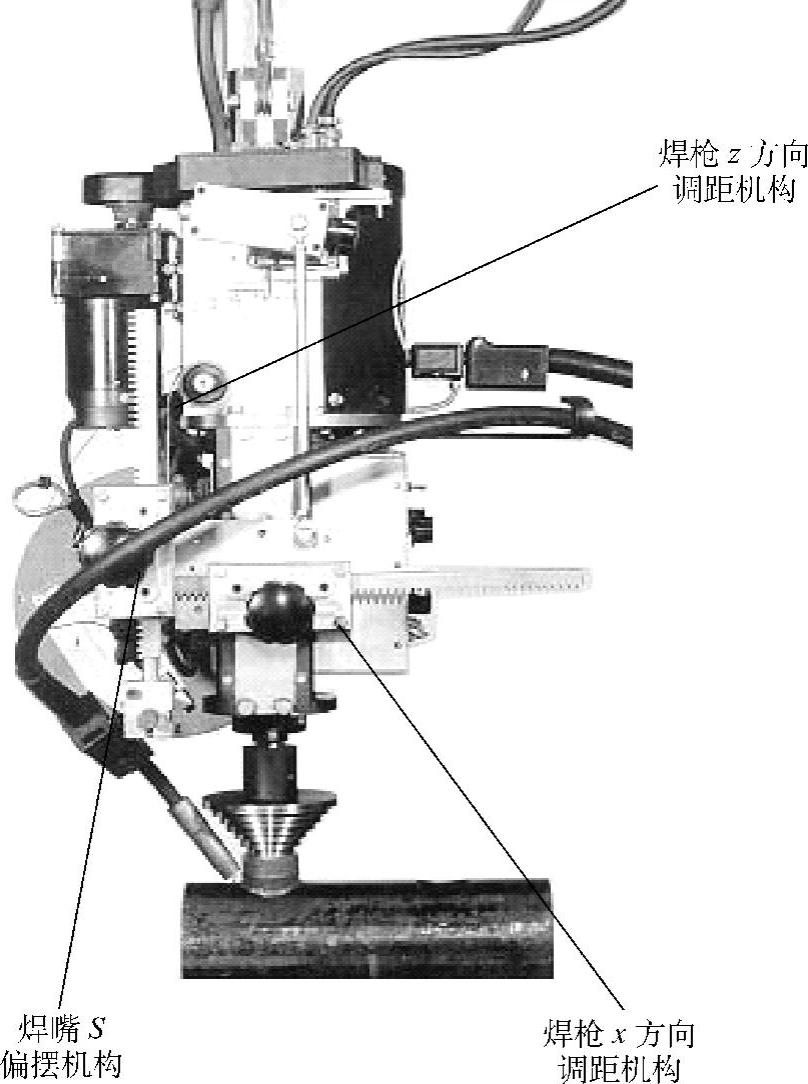
图2-110 手动调节“马鞍形”焊缝焊管机
图2-111 “马鞍形”焊缝自动焊管机

图2-112 “马鞍形”焊缝SAW焊管机(北京“中电华强”)
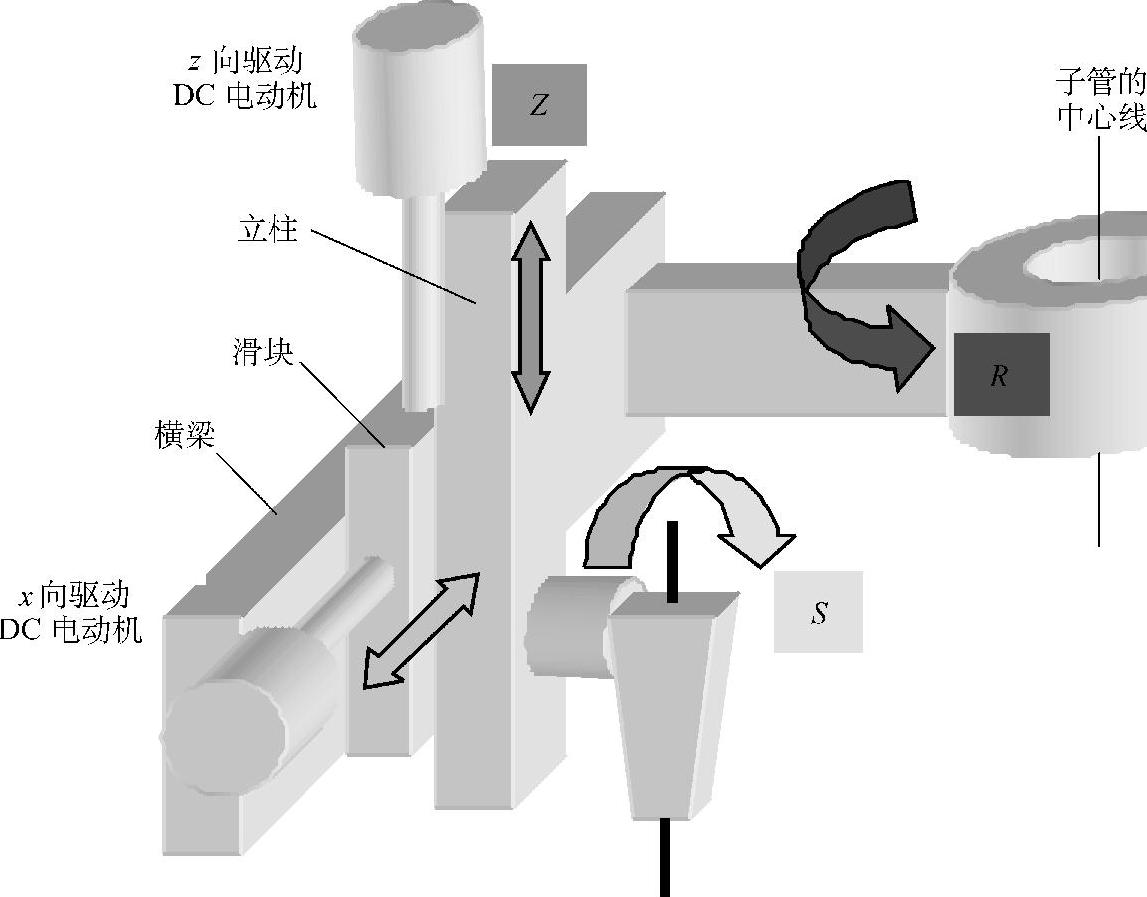
图2-113 “马鞍形”焊缝自动焊管机的机械伺服结构
5.“马鞍形”焊缝焊接同步速度补偿问题
进行“马鞍形”焊缝埋弧焊时,焊接电弧的几何中心点在绕子管一周的过程中,会有以下几种焊接状态:A(点)—B(点)的下坡段、B—C的上坡段、C—D的下坡段、D—A的上坡段(图2-114)。在上坡段与下坡段,理论上的焊接速度瞬态矢量VW如矢量图所示。
由矢量图看出:焊接速度瞬态矢量是垂直速度瞬态矢量VV与水平速度瞬态矢量VH的合成矢量。
在上坡段与下坡段,垂直速度瞬态矢量VV,是由焊嘴z轴自动调节系统自动产生的,它是个数值大小与方向随上坡段与下坡段的变化而变化的矢量,但在马鞍形焊道A、B、C、D各点的附近短段数值不大,可看作为零。
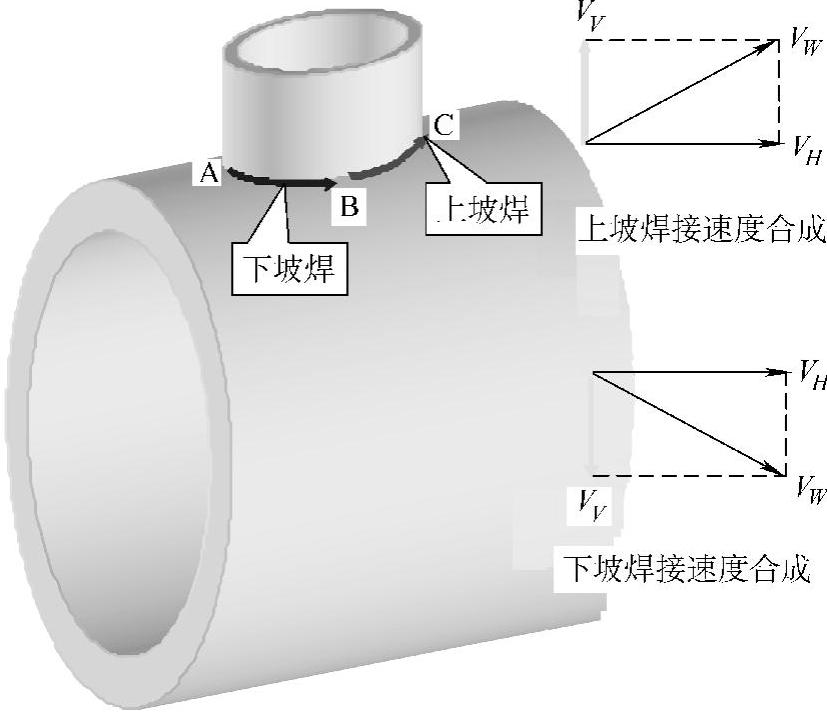
图2-114 马鞍形焊缝焊接的速度合成
水平速度瞬态矢量VH是r向的旋转伺服速度,如果以恒定数值的速度旋转,那么根据速度合成矢量图得知:上坡段与下坡段的焊接速度VW变快了,因此要一定程度地减小r向的旋转伺服速度VH,以便补偿焊接速度VW的变快。在微机控制的“马鞍形”焊缝埋弧焊自动焊机中,一般就考虑了r向的旋转伺服速度VH补偿问题。
6.马鞍落差调整(z向伺服)系统的构成
“马鞍形”焊缝埋弧焊机,对焊嘴的z向伺服系统,也称为马鞍落差调整系统。
焊嘴的z向伺服有两个含义:
一是焊完一层后,将整个焊嘴提升一层的距离。
二是在一个焊道的焊接过程中,为保持给定的弧长不变,而引入的弧长自动调节系统。综合上述两因素,马鞍落差调整系统的构成框图,如图2-115所示。
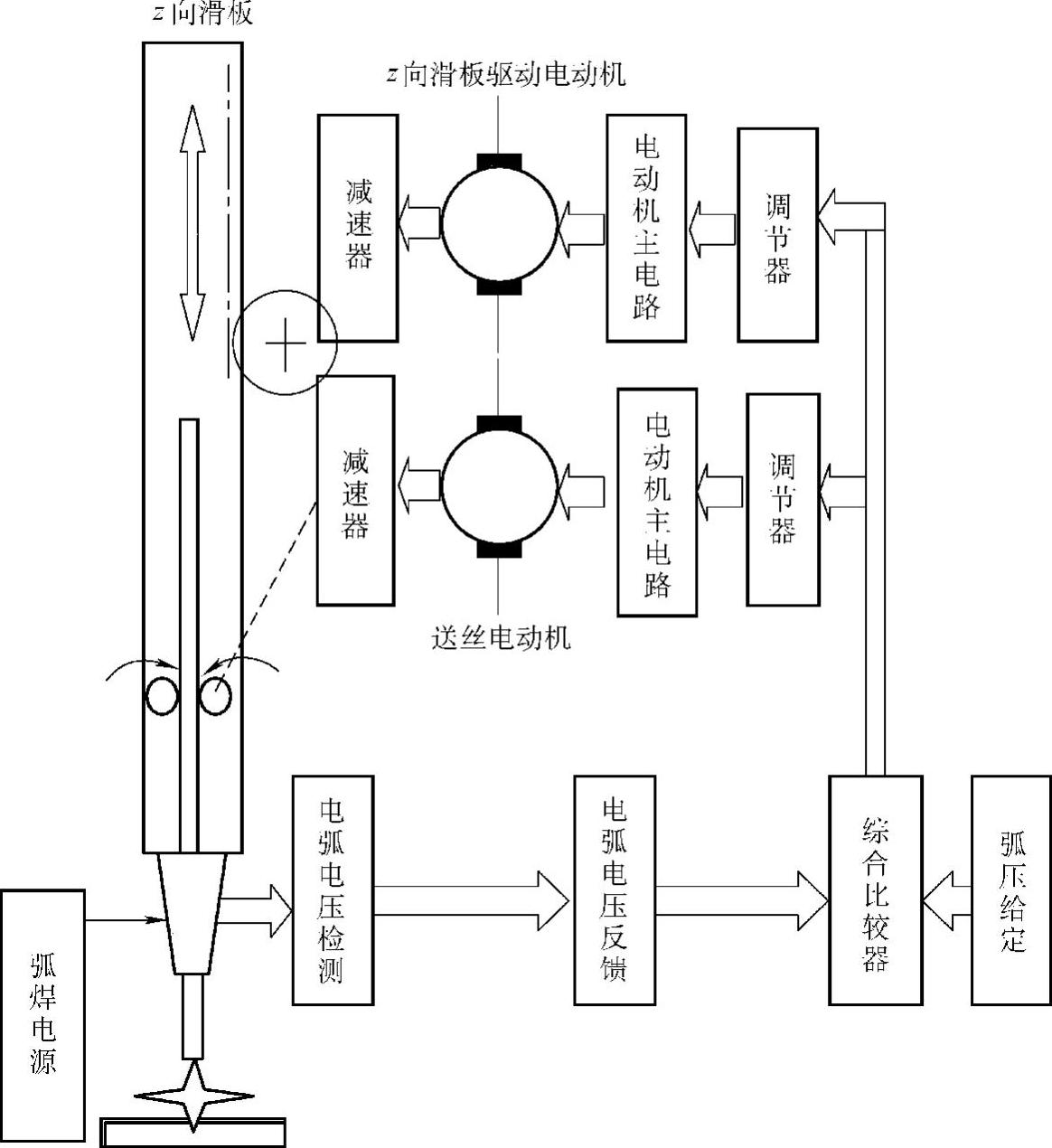
图2-115 马鞍落差调整(z向伺服)系统的构成
图2-116是北京中电华强生产的“马鞍形”焊缝全自动焊机的控制台。
该焊机由“马鞍形”焊缝焊机本体、配置ESAB(瑞典)或LINCOLN(美)焊机、控制箱等部分组成,应用于回转直径300~1000mm的筒体与管座的正交角焊缝的埋弧焊接。
该焊机具有专门设计的马鞍形运动机构及马鞍同步速度补偿,马鞍落差(即z向)可达90mm,能实现焊接过程中调整马鞍落差;能够数字设定、显示焊接参数。

图2-116 “马鞍形”焊缝SAW焊管机的控制箱面板
通过软件编制能预置十套焊接参数,焊接过程中不用停机随时调用,即焊接参数能够在线调整、焊后根据要求可存储或取消修正后的参数。