5.10.3 G0运动的公差(STOLF)
(1)指令功能 通过在零件程序中设定STOLF可临时覆盖设置的G0公差系数(MD20560),此时不会修改MD20560中的值。在复位或零件程序结束后,配置的公差系数会重新生效。
G0公差系数是指在G0运动(快速移动,进给运动)中可允许较大的公差。优点是缩短了G0的返回时间。
(2)编程格式
STOLF=<公差系数>
(3)指令参数说明
STOLF:用于设定G0公差系数的指令。
<公差系数>:G0公差系数。系数可大于1也可小于1。但是通常可为G0运动设置较大的公差。在STOLF=1.0(等于配置的默认值)时,G0运动时生效的公差与非G0运动时相同。
(4)注意事项
1)通过G0公差系数的机床数据(MD20560$MC_G0_TOLERANCE_FACTOR)可设置该G0公差。G0公差系数仅在以下情况下才生效:
①压缩器功能:COMPON、COMPCURV和COMPCAD。
②平滑功能:G642和G645。
③方向圆滑:OST。
④方向平滑:ORISON。
⑤路径相关的方向平滑:ORIPATH。
2)存在连续多个(≥2)G0程序段。在只有一个G0程序段时G0公差系数不会生效,因为在从非G0运动过渡至G0运动(并反向)时,通常“较小的公差”(工件加工公差)会生效。
3)零件程序中或当前插补程序中生效的G0公差系数可通过系统变量读取。在同步动作或在带预处理停止的零件程序中,通过系统变量$AC_STOLF生效的G0公差系数。当前主程序段预处理时生效的G0公差系数。
在不带预处理停止的零件程序中,通过系统变量$P_STOLF编程的G0公差系数。如果在生效的零件程序中未使用STOLF赋值,则两个系统变量会输出通过MD20560$MC_G0_TOLER-ANCE_FACTOR设置的值。
如果在程序段中无快速移动(G0),则这些系统变量总是输出值1。
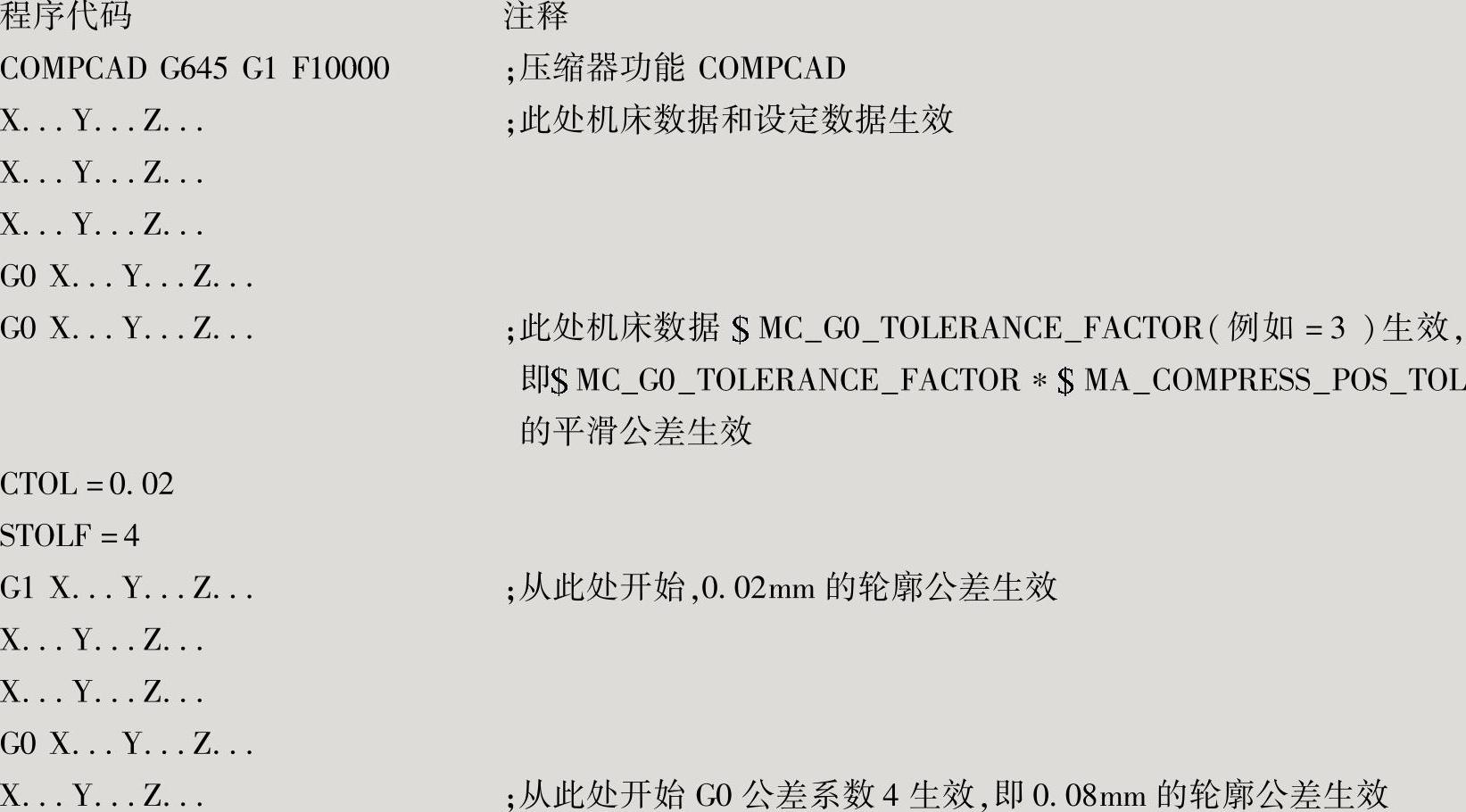
(5)编程示例