4.右手定则
2025年09月21日
4.右手定则
● 常规的右手定则。
如果坐标系的原点在右手掌,拇指向上延伸的方向对应于某个坐标轴的方向,则可以利用常规的右手定则确定其他坐标轴的方向。例如,图3.3.3所示,假设拇指指向ZC轴的正方向,食指伸直的方向对应于XC轴的正方向,中指向外延伸的方向则为YC轴的正方向。
● 旋转的右手定则。
旋转的右手定则用于将矢量和旋转方向关联起来。
当拇指伸直并且与给定的失量对齐时,则弯曲的其他四指就能确定该矢量关联的旋转方向。反过来,当弯曲手指表示给定的旋转方向时,则伸直的拇指就确定关联的矢量。
例如,图3.3.4所示,如果要确定当前坐标系的旋转反时针方向,那么拇指就应该与ZC轴对齐,并指向其正方向,此时逆时针方向即为四指从XC轴正方向向YC轴正方向旋转。
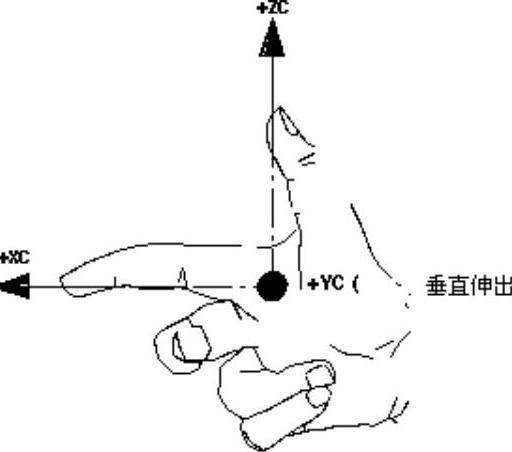
图3.3.3 常规的右手定则
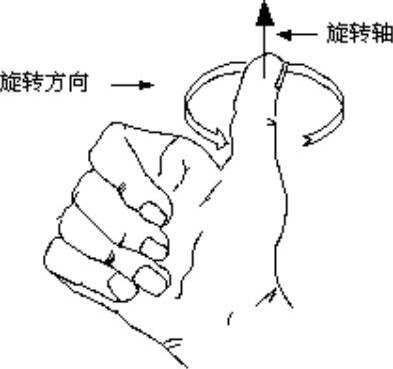
图3.3.4 旋转的右手定则